
Definir o suporte (posição de montagem do robô)
O robô pode ser instalado em qualquer ângulo. 
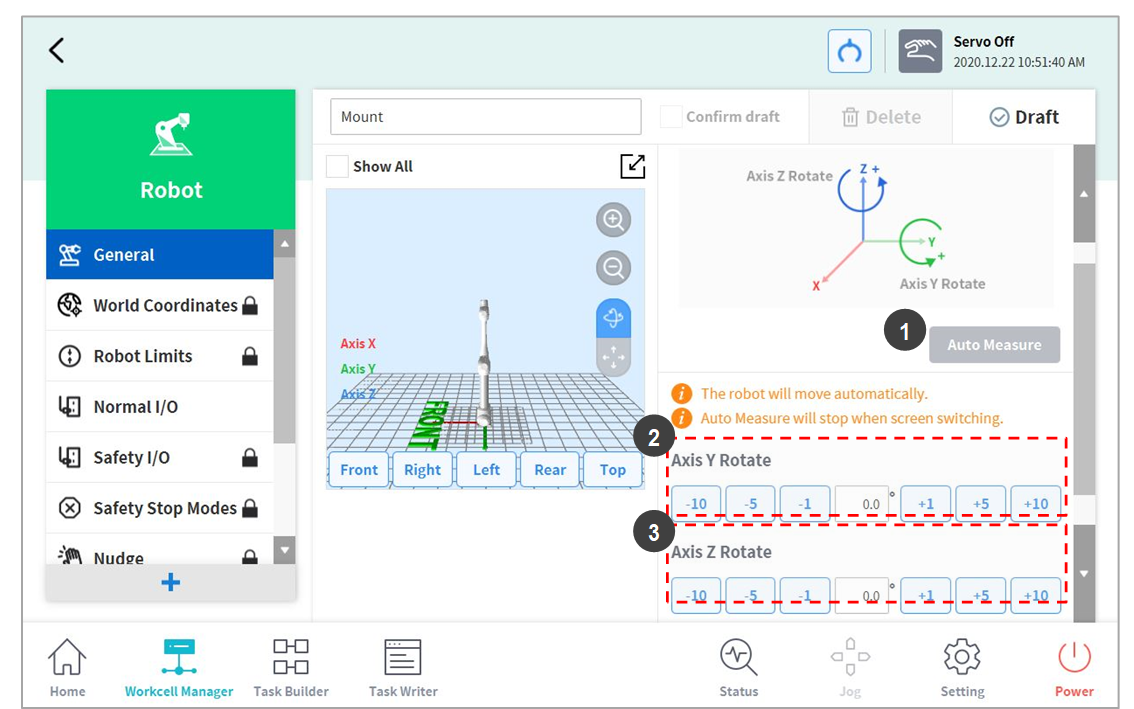
Número | Item | Descrição |
|---|---|---|
1 | Cálculos automáticos | Calcula automaticamente o ângulo de instalação do robô. |
2 | Defina a rotação do eixo Y. | Introduza o ângulo do eixo Y do robot durante a instalação. |
3 | Definições de rotação do eixo Z. | Introduza o ângulo do eixo Z do robot durante a instalação. |
Saber
Toque no botão Auto Calculate(Calcular automaticamente) para calcular automaticamente o valor da inclinação. A função Auto Calculate Setup Position(Calcular posição de configuração automática) pode ser utilizadaquando a base do robot está inclinada mais de 5 graus para o solo. O cálculo automático da posição do robô permite o ensino manual, o controlo de força, Embora a posição de configuração necessária para a função de controlo adaptável possa ser facilmente definida, a definição da posição do robot através do cálculo automático pode reduzir a precisão absoluta da posição do robot em comparação com a introdução de medições precisas.
Cuidado