
Definir limites do robô
Definir limites de segurança para a função de vigilância de segurança.
Saber
- Dependendo da linha do robot, os valores limite e padrão das definições de segurança podem ser diferentes.
- O limite de segurança é a condiçãoem que a função de monitorização com classificação de segurança começa a parar. A posiçãoem que o batente foi concluído,a força externa pode diferirdo limite de segurança definido.
Limites TCP/Robot
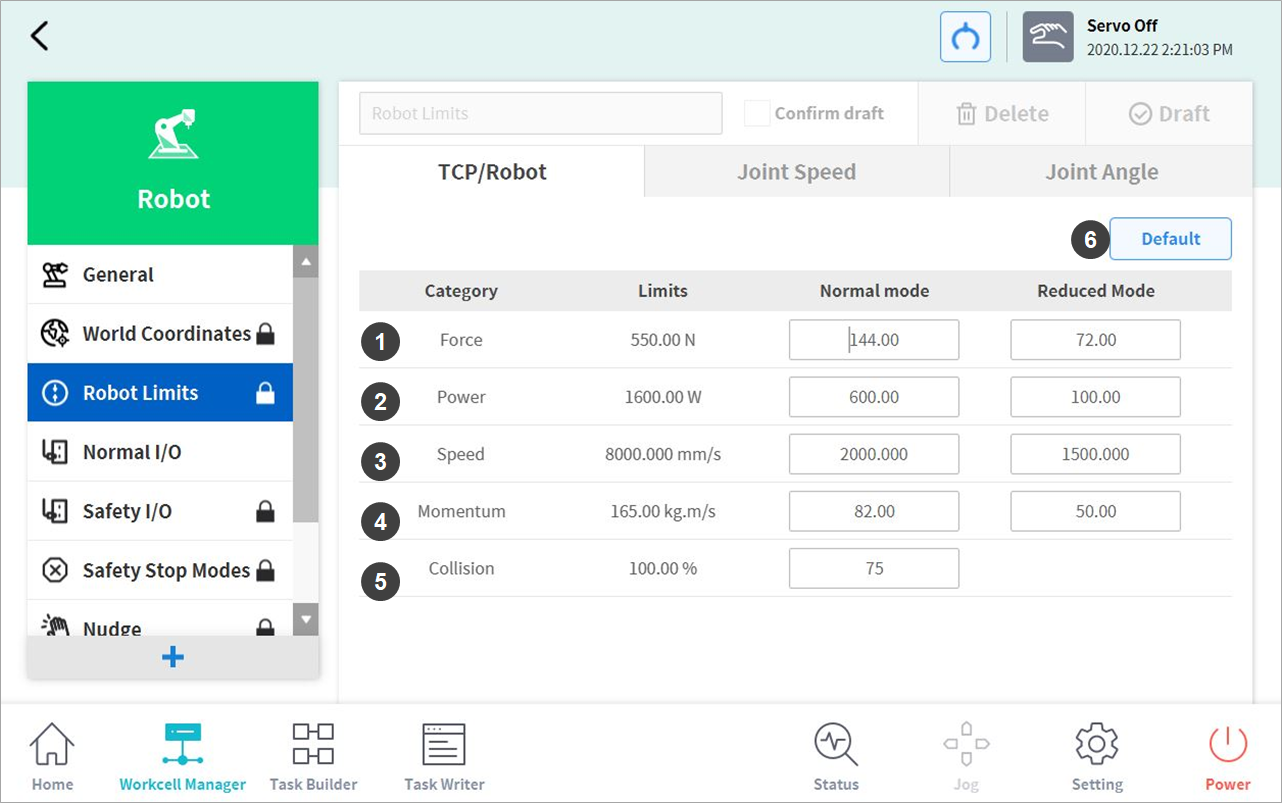
Para definir os limites do TCP/Robot, selecione Robot > Robot Limits > TCP/Robot (Robô > Limites do Robô > TCP/Robô) na célula de trabalho do Robô. Oecrã TCP/Robot Limit Setup (Configuração do limite do TCP/robot) é composto por
Número | Item | Descrição |
|---|---|---|
1 | Força TCP (N) | Pode limitar a quantidade de força que atua no ponto central da ferramenta(TCP). |
2 | Potência mecânica (W) | Limite a quantidadede potência mecânica do robô. |
3 | Velocidade TCP (mm/s) | Permite limitar a velocidade do ponto central da ferramenta(TCP). |
4 | Quantidade de atividade (kg.m/s) | É possível limitar a quantidade de impulso no robô. |
5 | Sensibilidade de colisão (%) | Permite-lhe definir a sensibilidade de deteção de colisão. |
6 | Predefinição | Altere as definições do ponto central da ferramenta/limite do robot para os valores predefinidos. |
Limites de velocidade angular da junta
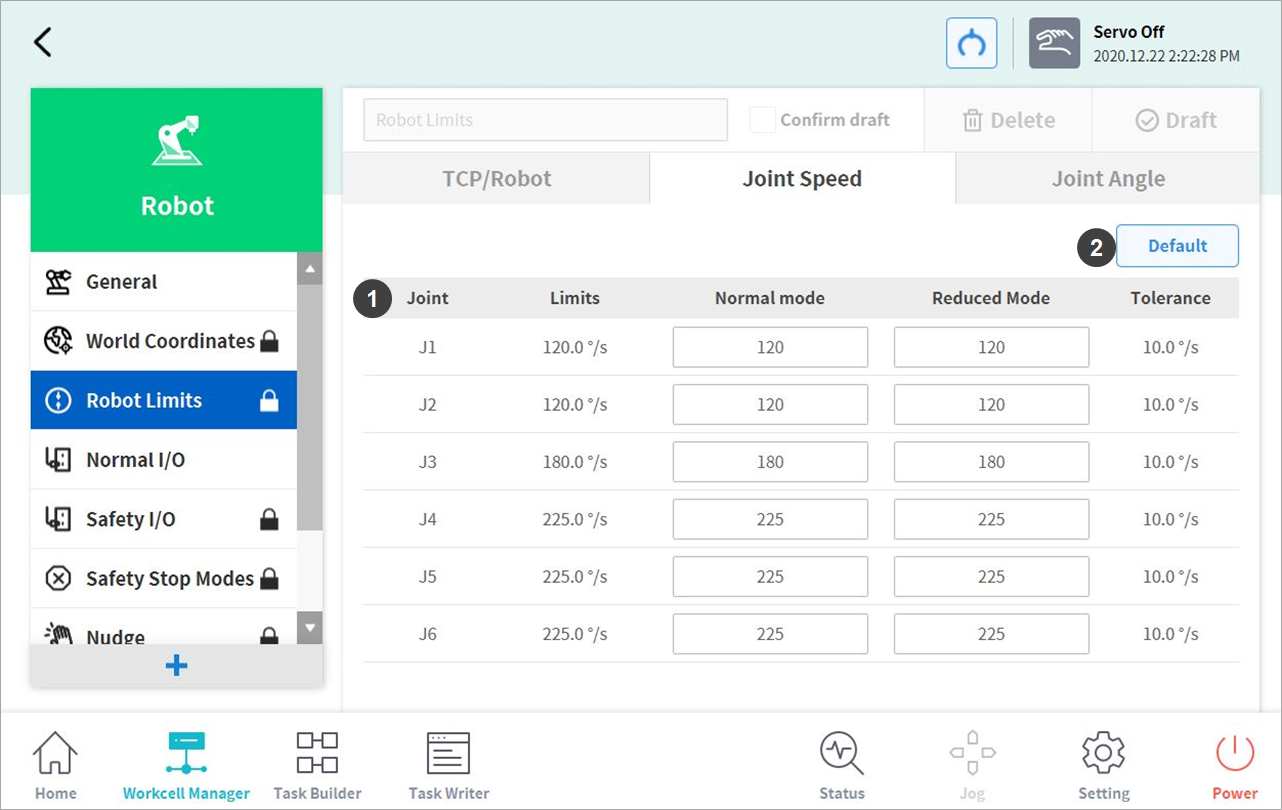
Para definir o limite de velocidade angular da articulação, selecione Robot > Robot Limits > Joint angle speed(Robô > Limites do robô > Velocidade do ângulo da articulação) na célula de trabalho do robô. O ecrã Set Joint Angle Speed Limit (Definir limite de velocidade do ângulo da junta) é
Número | Item | Descrição |
|---|---|---|
1 | Velocidade angular da junta | Pode limitar a velocidade angular de cada junta. |
2 | Predefinição | Altere a definição Limite de velocidade do ângulo da junta para o valor predefinido. |
Limites do ângulo da junta
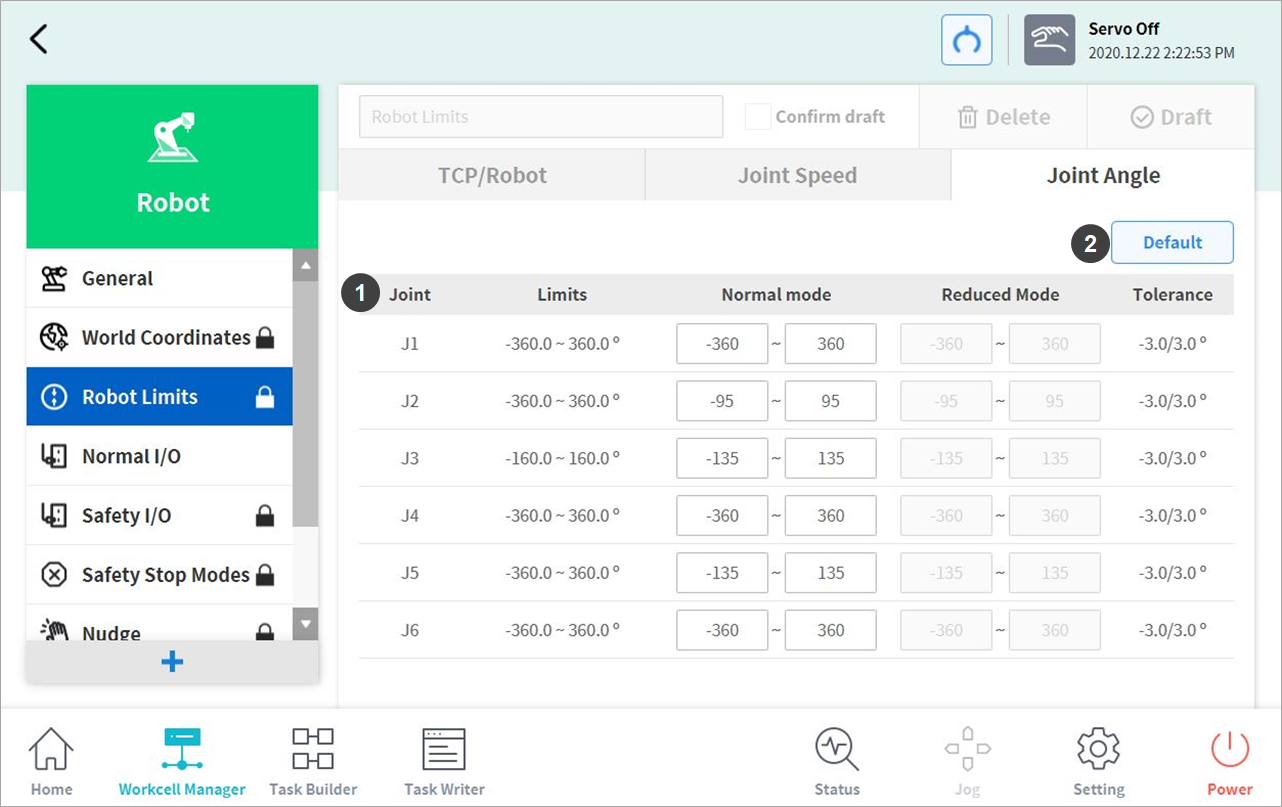
Para definir o limite do ângulo de articulação, selecione Robot > Robot Limits > Joint Angle (Robô > Limites do Robô > ângulo de articulação) na célula de trabalho robótica. O ecrã Set Joint Angle Limit (Definir limite do ângulo da junta) é composto
Número | Item | Descrição |
|---|---|---|
1 | Intervalo angular de cada junta | Pode limitar o intervalo angular de cada junta. |
2 | Predefinição | Altere a definição do limite do ângulo da junta para o valor predefinido. |