
Defina o limite de espaço
Para definir o limite de espaço do robô, 
- Introduza o nome da célula de trabalho que pretende registarna janela Introduza o nome da célula de trabalho na parte superior do ecrã de configuração da célula de trabalho.
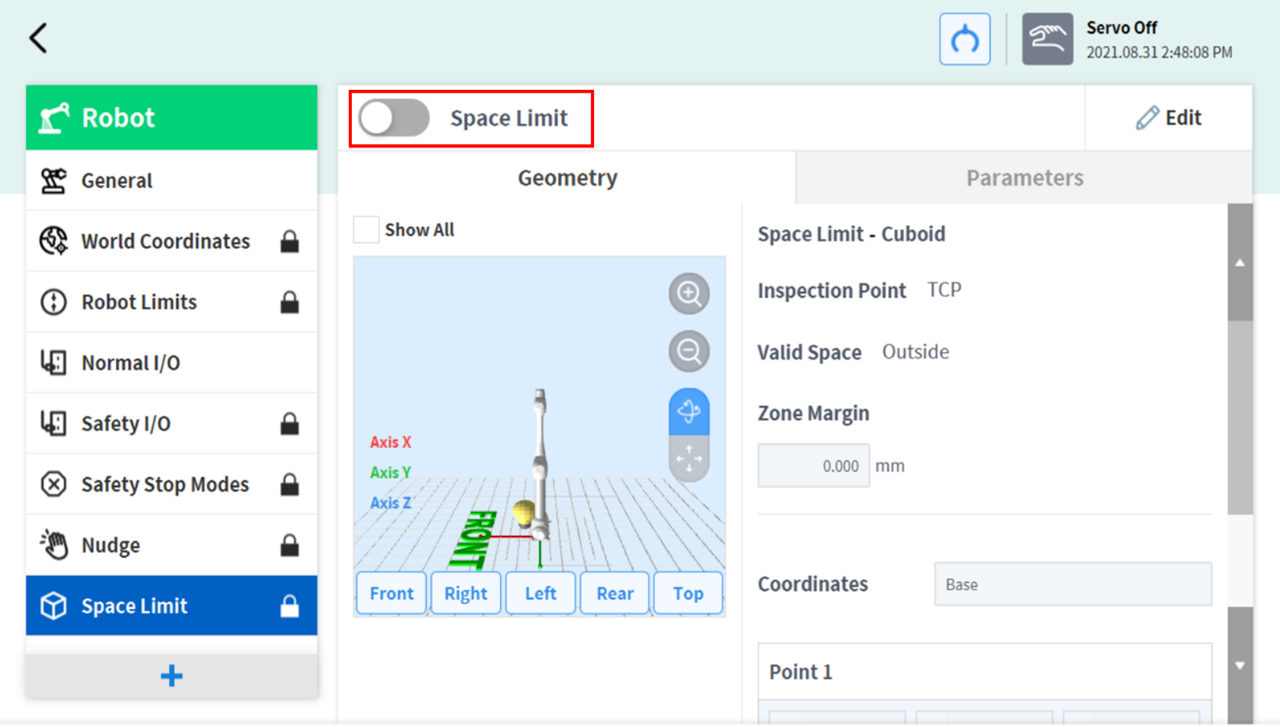
- No separador Geometria, as informações de posição sob a forma de limite de espaço, o ponto de inspeção eo espaço vazio , Defina a margem da zona.
- No separador Parameters(Parâmetros), selecione Dynamic Zone Enable( Ativar zona dinâmica) eAdvanced (Avançadas)Depois de configurar o , prima o botão Rascunho.
- Certifique-se de que todos os valores de parâmetros apresentados são os mesmos que pretende definir , selecione Confirmar rascunho e clique em Confirmar.
- Prima o botão de alternância Ativarpara aplicar limites de espaço.
Saber
Existe um valor predefinido para a margem de zonacom base na forma como a configura.
- Se a configuração da ferramenta não estiver selecionada, ovalor da margem TCP é de 0 mm
- Se você selecionar Ferramentas Configuração e Verificação do volume do corpo , ovalor da margem TCP será de 0 mm
- Se a configuração da ferramenta não estiver definida e a verificação do volume corporal não estiver selecionada, ovalor da margem TCP é de 0 mm
- Se a configuração da ferramenta não estiver definida e a verificação do volume do corpo estiver selecionada, ovalor da margem TCP éde 60 mm