
Ecrã de salto
O ecrã Movement (Movimento) permitemover o robot para o ângulo/coordenadas alvo. Se o robô souber antecipadamente quais coordenadas ele precisa mover, ou se precisar de um movimento menor para um ponto decimal, ele pode ser movido inserindo essas coordenadas.
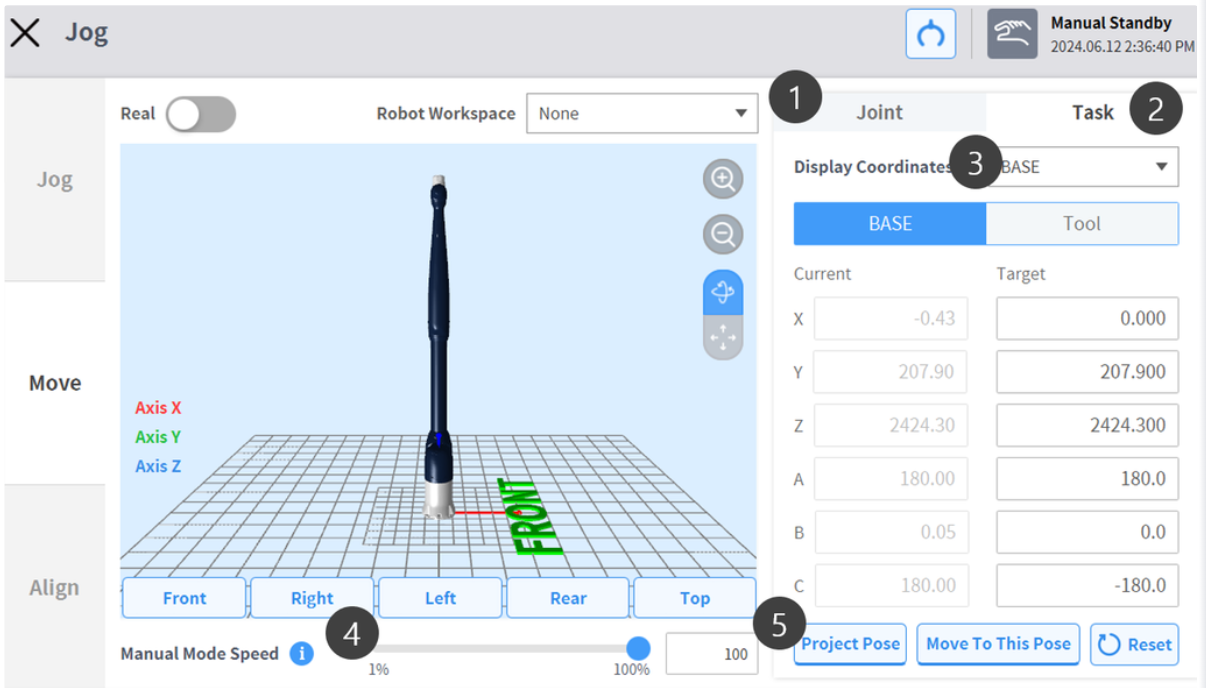
Número | Item | Descrição |
1 | Juntas | Define as coordenadas de referência a serem usadas ao mover o robô para o Jog. |
2 | Tarefas | Define a coordenada do ângulo de referência a ser utilizada ao mover o robot para a Jog. |
3 | Definir ponto de referência | Define o ponto base para alinhar o sistema de coordenadas da tarefa.
|
4 | Velocidade do modo manual | Define a velocidade do movimento do robô no modo manual. Arraste o ponteiro do cursorpara ajustar a velocidade. Se o ponteiro do cursor for 100%, a velocidade máxima da junta correspondente no separador Move (Mover) é de 30 graus/s e a velocidade máxima para a tarefa é de 250 mm/s. Esta velocidade afeta o movimento dos botões de movimento e de movimento. |
| 5 | Project Pose | As posições a serem movidas pelas cinco articulações são apresentadas como valores de coordenadas com seis graus de liberdade. |