O que é o ângulo A, B e C da régua?
O ângulo da régua é um método de representar a orientação de um objeto nos eixos X, Y e Z perpendiculares entre si. A, B e C representam ângulos de rotação sequenciais. Cada marca de robô define uma sequência diferente para esta rotação A, B e C, como RZ-ry-Rx e Rx-ry-RZ.
Os robôs Doosan utilizam RZ-ry-RZ. Onde RZsignifica rotação no eixo Z e Ry para rotação no eixo Y. Rodar o ângulo A em RZ, o ângulo B em Ry e o ângulo C em RZ em sequência indicará a direção atual de rotação do objeto. É importante observar que após a rotação inicial do sistema de coordenadas de referência para o eixo Z, a rotação é sobre o novo sistema de coordenadas.
Você pode visualizar isso em 1 a 4 passos.
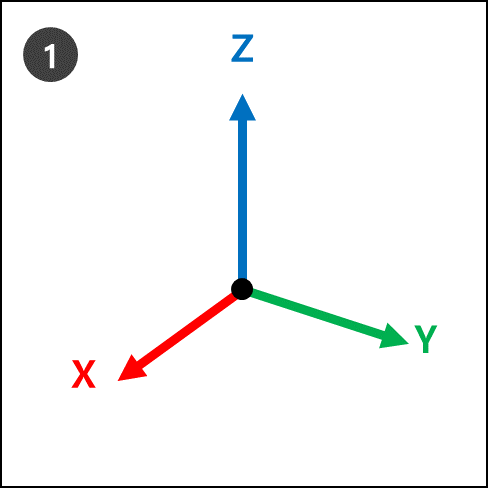
Existe um sistema de coordenadas de referência (X, Y, Z) da seguinte forma:
RZ : Roda o ângulo A à volta do eixo Z.
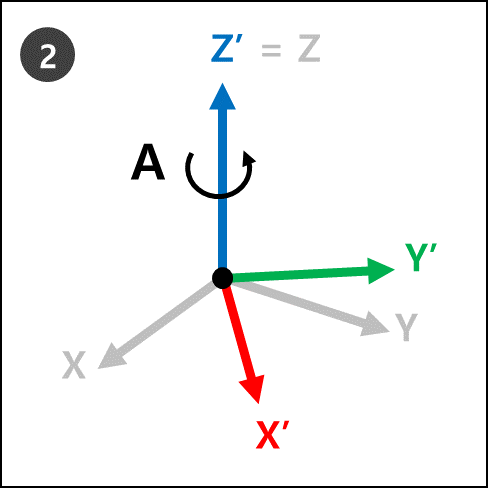
Ry : No novo sistema de coordenadas (X', Y', Z') no processo 2, rode cerca do novo eixo Y (eixo Y') por um ângulo de B.
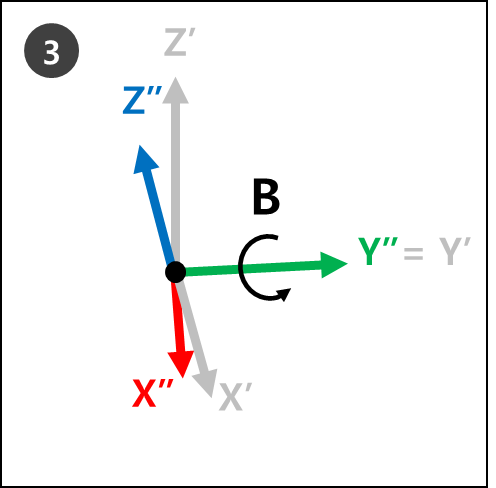
RZ : No novo sistema de coordenadas (X'', Y', Z'') no processo 3, rode cerca do novo eixo Z (eixo Z'') por um ângulo de C
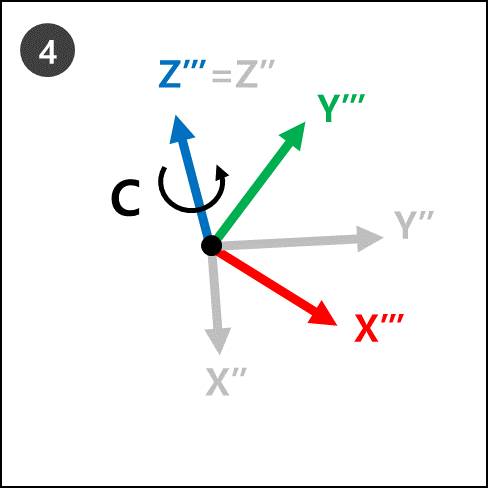
O novo sistema de coordenadas (Z''', Y'', X'''' no processo 4 refere-se à rotação atual do robô quando os ângulos de rotação do lubrificador A, B e C são aplicados.
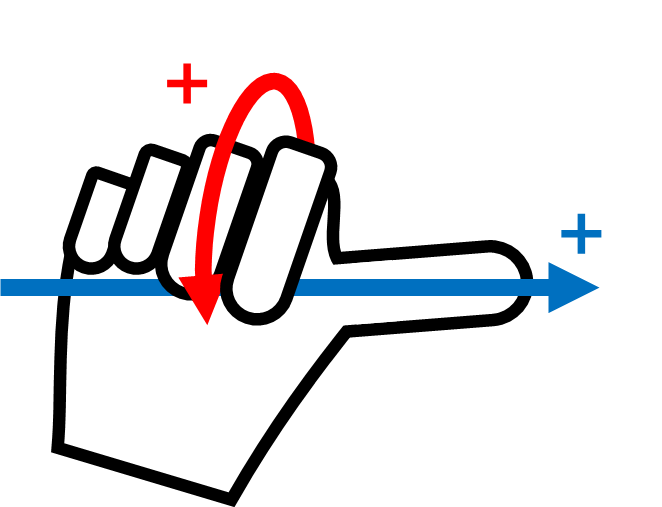
É fácil de visualizar com a mão direita. Vire à direita: Isto é chamado a lei da mão direita, e se você fizer os três dedos a 90 graus um do outro (eixo X), dedo indicador (eixo Y), e dedo médio (eixo Z), eles serão idênticos ao sistema de coordenadas ao longo dos eixos X, Y e Z que são perpendiculares uns aos outros.
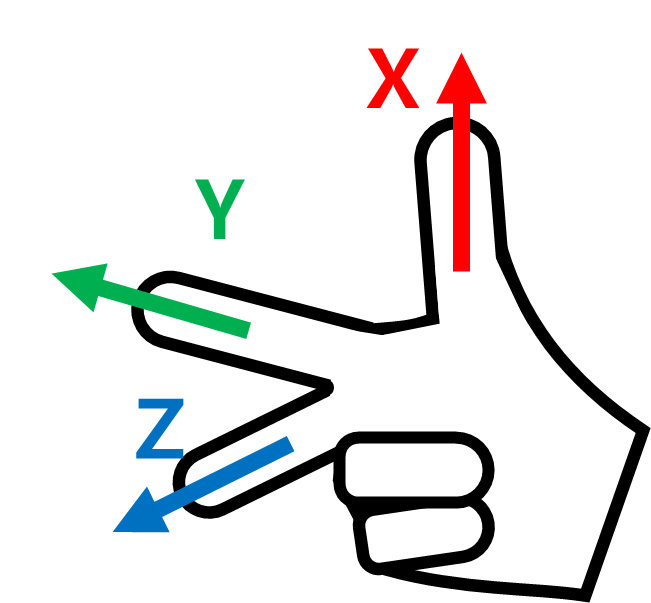
Agora tente transformar sua mão direita em uma posição cartesiana direita da lei, então RZ, ry, e RZ.
RZ: Roda o ângulo A à volta do dedo médio (eixo Z).
Ry: Roda o ângulo B em torno do dedo indicador (eixo Y).
RZ: Roda o ângulo C à volta do dedo médio (eixo Z).
Saber
A direção de rotação para A, B e C é a direção 'mais' na qual os outros quatro dedos estão apontando quando o polegar direito está apontando na direção 'mais' nesse eixo. Isto é conhecido como direito lei da NASA.