
O que é Singularity?
Num robô poliarticular, Singularity é simplesmente a posição (ou ponto) onde o robô é difícil de calcular a sua próxima posição enquanto está em movimento. Para um robô multijunta, calcule o ângulo de cada junta à medida que se move em relação à ponta do robô.
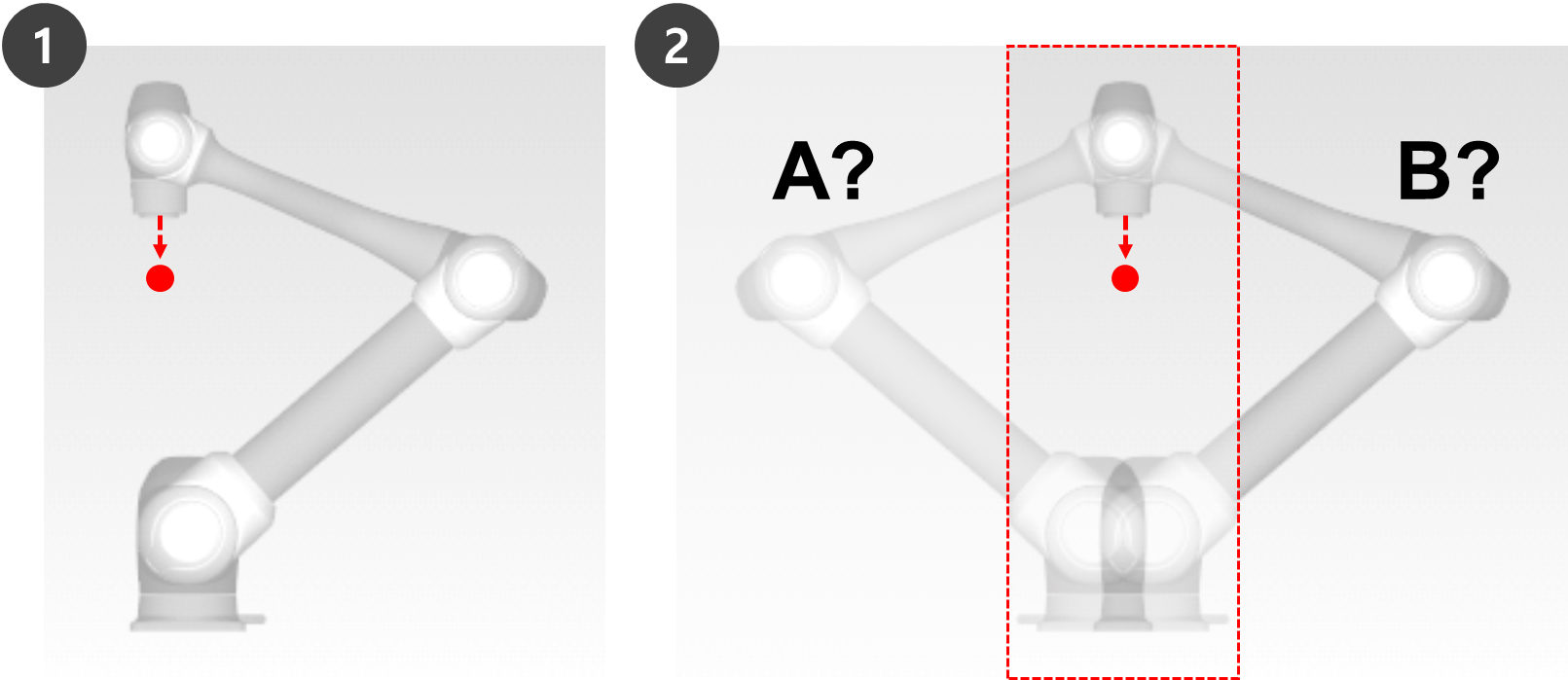
Por exemplo, se o robô quiser mover-se para um ponto vermelho na Figura 1 abaixo, o robô não será capaz de determinar se precisa mover para a posição A ou B na posição seguinte, como mostrado na Figura 2. Este local (ou ponto) é chamado de singularidade.
Na proximidade de um ponto de singularidade, o movimento do robô pode ser plano, pontual ou reto, o que pode resultar em movimento fraco, movimento não linear das extremidades do robô e aumento dos erros posicionais no controle. Existem três pontos específicos, como mostrado na figura, incluindo juntas robots retas.
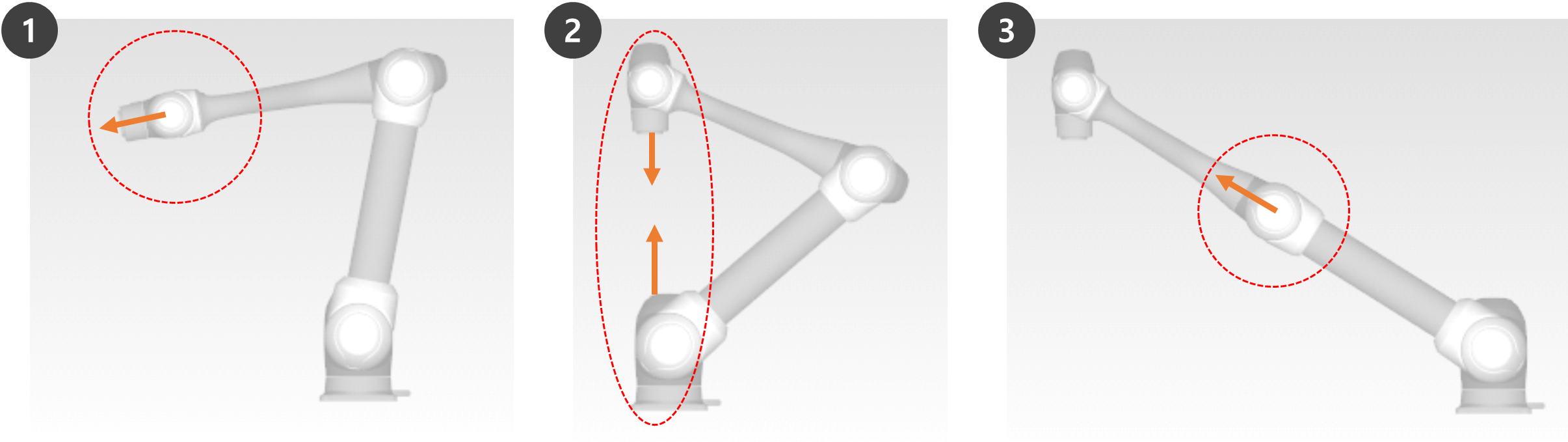
Pulse Singularity:Quando o eixo 5 está próximo de 0 º e a porção do pulso do robô está em linha
Os machados 4, 5 e 6 correspondem às articulações do pulso quando o robô multijunta é comparado a um braço humano.
Singularity do ombro: Se o eixo 1 e o eixo 6 são collinear
Os eixos 1 e 2 são as articulações do ombro quando o robô poliarticular é comparado a um braço humano.
Cotovelo Singularity: Se o robô está alinhado com o eixo 3 perto de 0 º
O terceiro eixo corresponde ao cotovelo quando o robô poliarticular é comparado ao braço de uma pessoa.
Cuidado
Manobras manuais e automáticas com rotação articular não são afetadas por singularidades.
Mover tarefas, comandos do MoveL, e assim por diante
As singularidades ocorrem apenas durante manobras manuais e automatizadas que movem as extremidades do robô de forma linear.
Mova as juntas, comando MoveJ, e assim por diante
O controlo da força ou o controlo da aclimatação não funcionam em áreas de singularidade.
Quando o caminho do movimento linear passa por estas singularidades, a velocidade de rotação em certos eixos será drasticamente aumentada, resultando em erros como a Violação do Limite de Velocidade Conjunto ou a Violação do Limite de ângulo Conjunto.
Evite o método de singularidade
O Doosan Robot oferece uma opção para evitar singularidades durante o controlo de movimento. No entanto, na área de singularidades, recomenda-se o uso do comando Mover Juntas da família MoveJ para configurar uma operação que não resulte em uma exceção.
Eis as opções para evitar a singularidade fornecidas pelo Doosan Robot:
Evitação automática: executa movimento evitando singularidades. Contudo, o movimento do robô pode diferir do caminho esperado.
Prioridade do percurso: Mantém o percurso e a velocidade, mas pode parar devido a um erro próximo de uma singularidade.
Velocidade variável: Mantém o caminho, mas abranda perto de uma singularidade.