
Flange E/S
Os conetores fornecem sinais de alimentação e controlo para acionar sensores incorporados em pinças ou em ferramentas específicas de robôs. As mesmas especificações são aplicáveis ao cabo industrial apresentado no exemplo abaixo.
- Phoenix contact 1404178, male (Straight)
- Phoenix contact 1404182, male (Right Angle)
O mapa de pinos para cada conetor é o seguinte:
O Diagrama Esquemático
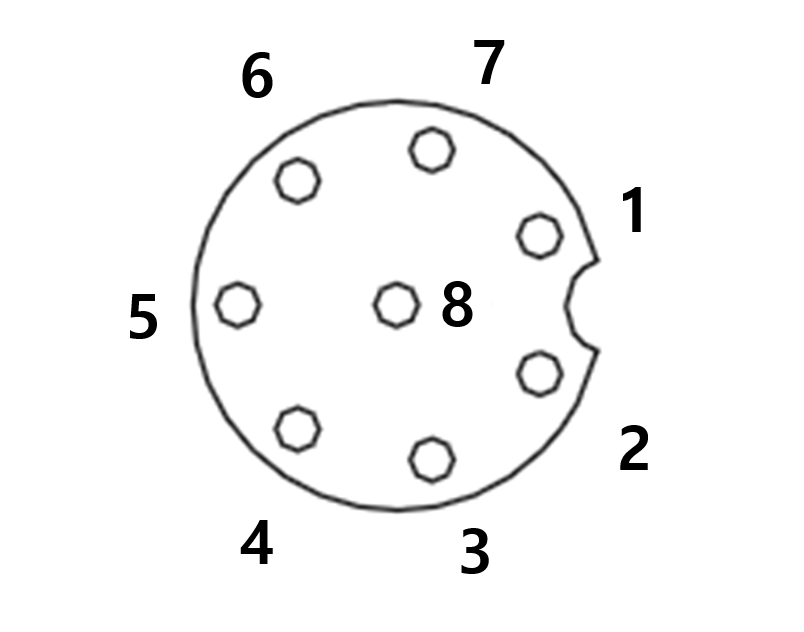
Há um conetor de 8 pinos na tampa do flange da extremidade do robô, especificação M8; consulte a ilustração abaixo para ver a localização e a aparência da montagem.
Cada um dos conetores X1 e tem diferentes capacidades de E/S e consulte a tabela abaixo para obter informações detalhadas sobre a configuração de E/S.
Configuração X1 (entrada/saída digital, RS 485)
No | Signal type | Description |
|---|---|---|
1 | Entrada digital 1 | PNP (Tipo de Fonte, padrão) |
2 | Saída digital 1 | definido como PNP (tipo de fonte, padrão) ou NPN (tipo de coletor) |
3 | Saída digital 2 | definido como PNP (tipo de fonte, padrão) ou NPN (tipo de coletor) |
4 | RS485 A | Taxa de transmissão máxima de 1M |
5 | Power | +24V |
6 | RS485 B | Taxa de transmissão máxima de 1M |
7 | Entrada digital 2 | PNP (Tipo de Fonte, padrão) |
8 | GND |
Cuidado
- Depois de verificar a configuração de E/S de acordo com a data de produção (etiqueta do robô mfg data), configure a ferramenta e a pinça.
- Pode encontrá-lo no Doosan Robot Lab. (https://robotlab.doosanrobotics.com)
- Ignorar a configuração de E/S sugerida acima e executar a ferramenta robótica pode causar danos permanentes ao produto.
A potência interna da E/S do flange está definida para 24 volts. Para obter as especificações de energia detalhadas, consulte a tabela abaixo para ligar a E/S.
Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
Supply voltage | - | 24 | - | V |
Supply current | - | 2 | 3 | A |
Saída digital | - | 2 | - | EA |
Entrada digital | - | 2 | - | EA |
A configuração foi cobrada da seguinte forma desde 22 de março de 2024
Configuração X1
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (Tipo de Fonte, padrão) |
2 | Digital Output 1 | definido como PNP (tipo de fonte, padrão) ou NPN (tipo de coletor) |
3 | Digital Output 2 | definido como PNP (tipo de fonte, padrão) ou NPN (tipo de coletor) |
4 | Analog Input 1 / RS-485 + | definido como Tensão (0-10 V) ou Corrente (4-20 mA, padrão) / Taxa de transmissão máxima de 1M |
5 | Power | Defina a fonte de alimentação interna para +24V (padrão), +12V ou 0V |
6 | Analog Input 2 / RS-485 - | definido como Tensão (0-10 V) ou Corrente (4-20 mA, padrão) / Taxa de transmissão máxima de 1M |
7 | Digital Input 2 | PNP (Tipo de Fonte, padrão) |
8 | GND |
Defina a fonte de alimentação interna para 24V, 12V ou 0V.
As especificações elétricas são mostradas abaixo:
| Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Aviso
- Configure a ferramenta e a pinça para evitar quaisquer situações perigosas em caso de perda de potência.
(Por exemplo , uma peça de trabalhoa cair de uma ferramenta) - Quando houver energia do robô, o Terminal 5 em cada conetor é sempre de 24 volts, então desligue a alimentação do robô ao configurar ferramentas e griefers.