
Definição do ponto central da ferramenta (TCP)
Ao configurar o ponto central da ferramenta (TCP), a posição e o ângulo de rotação com base nas coordenadas do flange também devem ser definidos. A distância do ponto inicial padrão da coordenada do flange até o ponto central da ferramenta (TCP) nas direções X, Y e Z não pode ser definida como maior que 10.000 mm. Além disso, se os comprimentos convertidos ( 
Em particular, se o TCP estiver configurado através do Auto Calcular, o cálculo é feito com base apenas nas posições X, Y e Z, sendo necessário inserir o ângulo de rotação. O ângulo de rotação pode ser definido com os itens A, B e C e é baseado no método de rotação Euler Z-Y-Z.
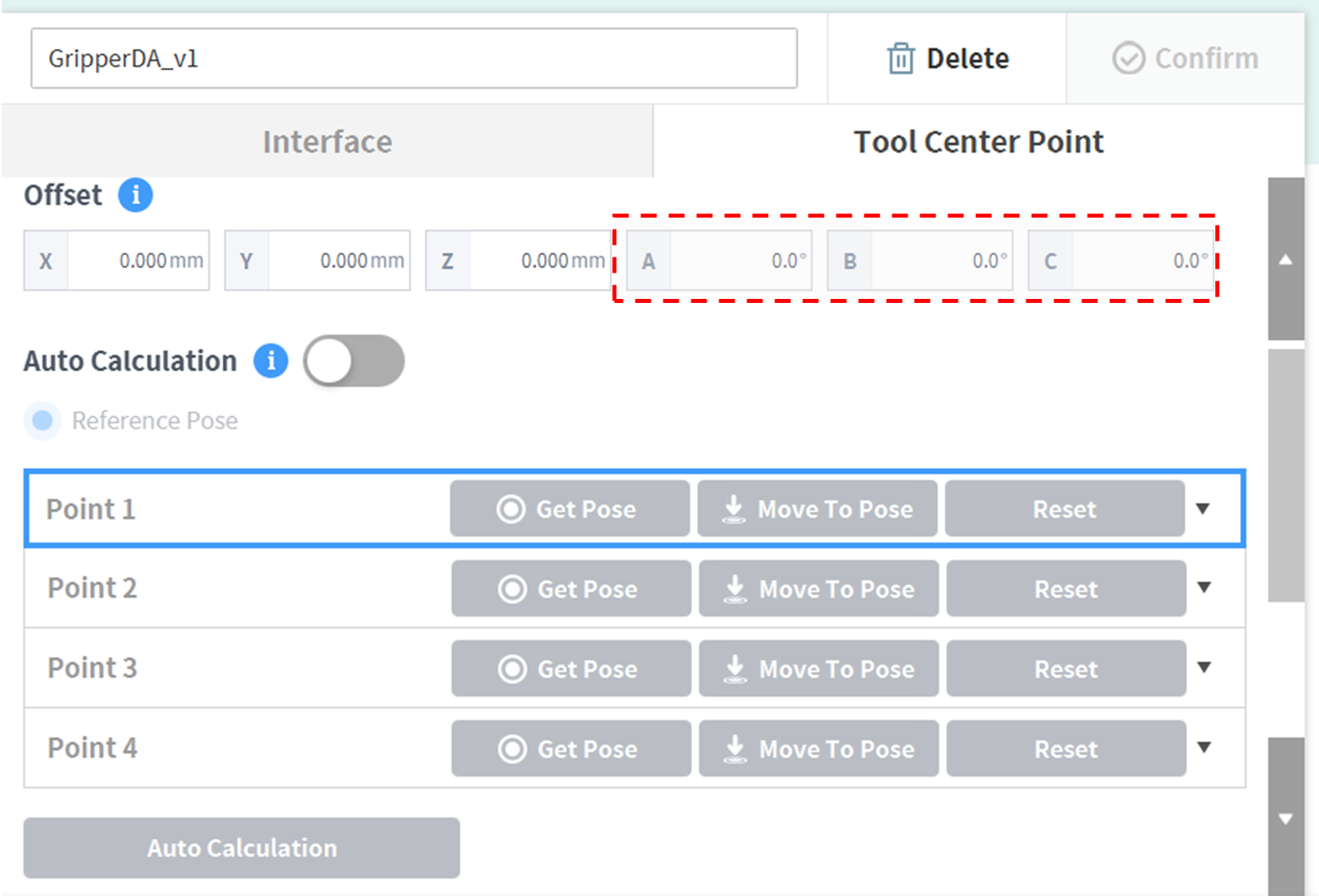
Na figura abaixo, os eixos de coordenadas são definidoscomo x, y e z em letras minúsculas e X, Y e Z.
- Eixos de coordenadas do "sistema de coordenadas de flange"(x, y, z): A direção do "sistema de coordenadas de flange" definido na extremidade da flangeé a mesmado sistema de coordenadas do robô quando o ângulo de articulação do robô é de (0,0, 0,0, 0,0, 0,0, 0,0, 0,0).
- Sistema de coordenadas "Sistema de coordenadas TCP" (X, Y , Z): Definido no fim ou no ponto de trabalho da ferramenta montada na extremidade da flange. No que diz respeito ao "Sistema de Coordenadas Flangeadas", o ângulo de rotação do "Sistema de Coordenadas TCP"é definido pela ordem abaixo de 1) a 3).
Uma rotação angular ao longo do eixo z do sistema de coordenadas da flange
Rotação do ângulo B ao longo do eixo y do sistema de coordenadas rodado através de 1)
C Rotação angular ao longo do eixo z' do sistema de coordenadas rodada por 2)
Aqui estão alguns exemplos de como definir o valor TCP seguindo o método acima.
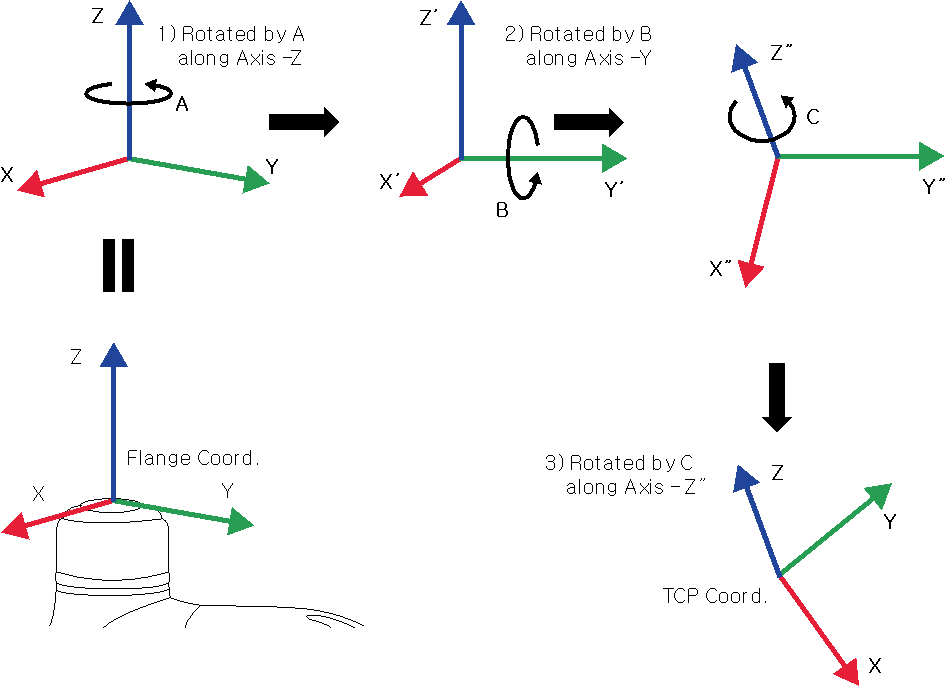
- [X, Y, Z, A, B, C] 0, 0, 100, 0, 0, 0]: Uma pinça típica ( Coord TCP) com apenas desvio na direção Z.
- [X, Y, Z, A, B, C] 100, 0, 300, 180, 45, 0]: Pinça esquerda ( Coord TCP. L)
- [X, Y, Z, A, B, C] 100, 0, 300, 0, 45, 0]: Pinça direita ( Coord TCP. R)