
Função de intervenção do operador
Se ocorrer um problema enquanto o robô estiver a operar ou um utilizador emitir um comando, o robô deixa de operar e apresenta uma mensagem pop-up permitindo ao operador intervir e resolver a situação. Após o utilizador resolver o problema, a tarefa continua na linha do programa onde ocorreu o problema.
Nota
Para utilizar a funcionalidade de intervenção do trabalhador, deve concluir uma das definições abaixo.
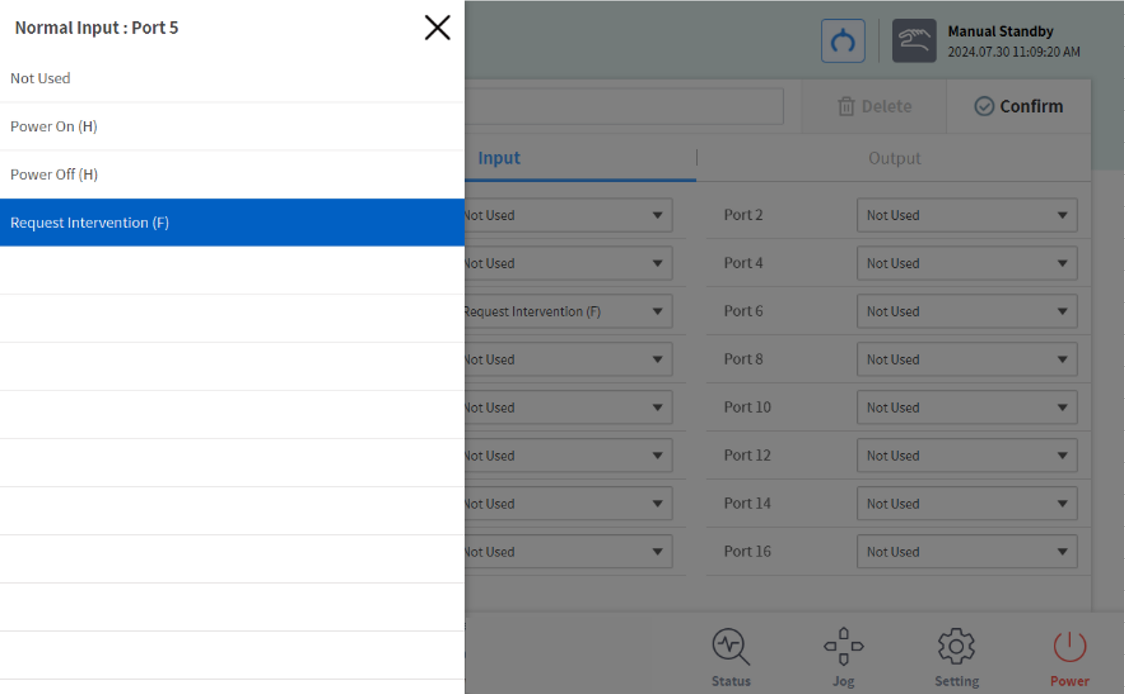
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Para definições detalhadas, consulte a Welding Techinical Note.)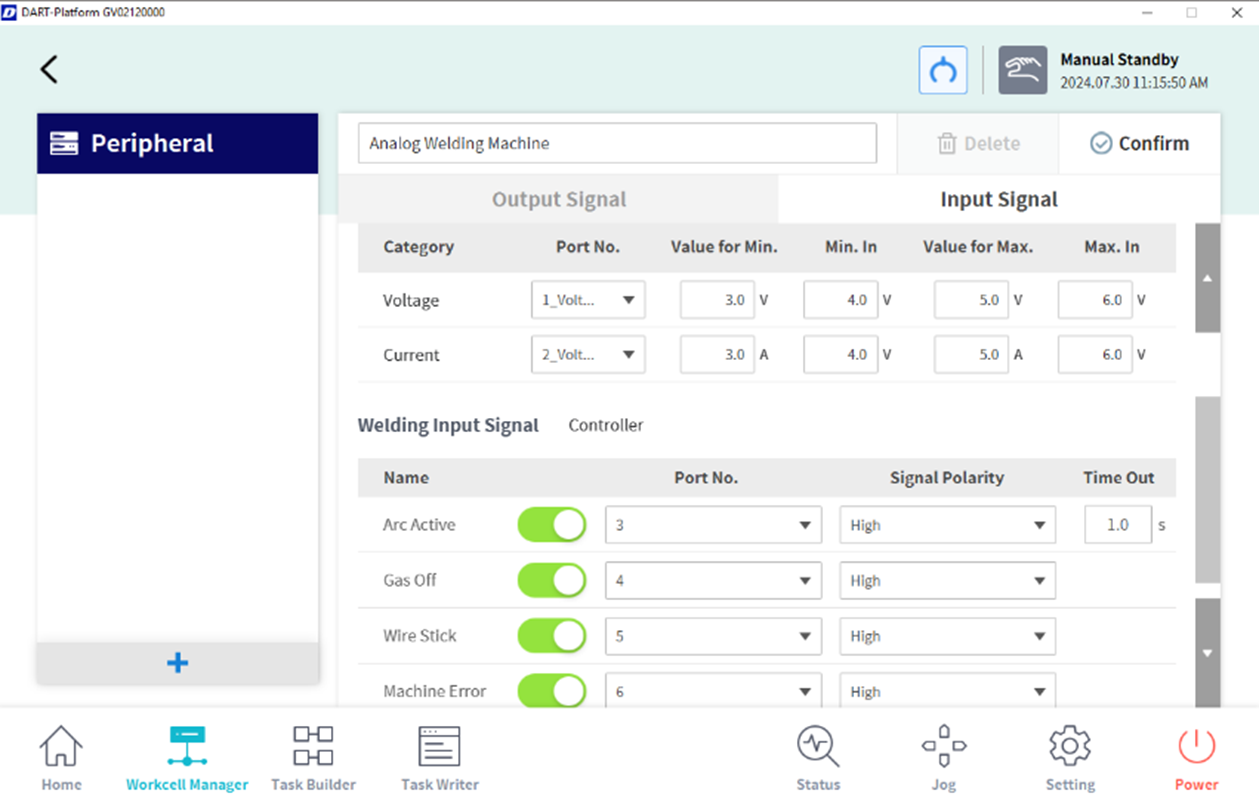
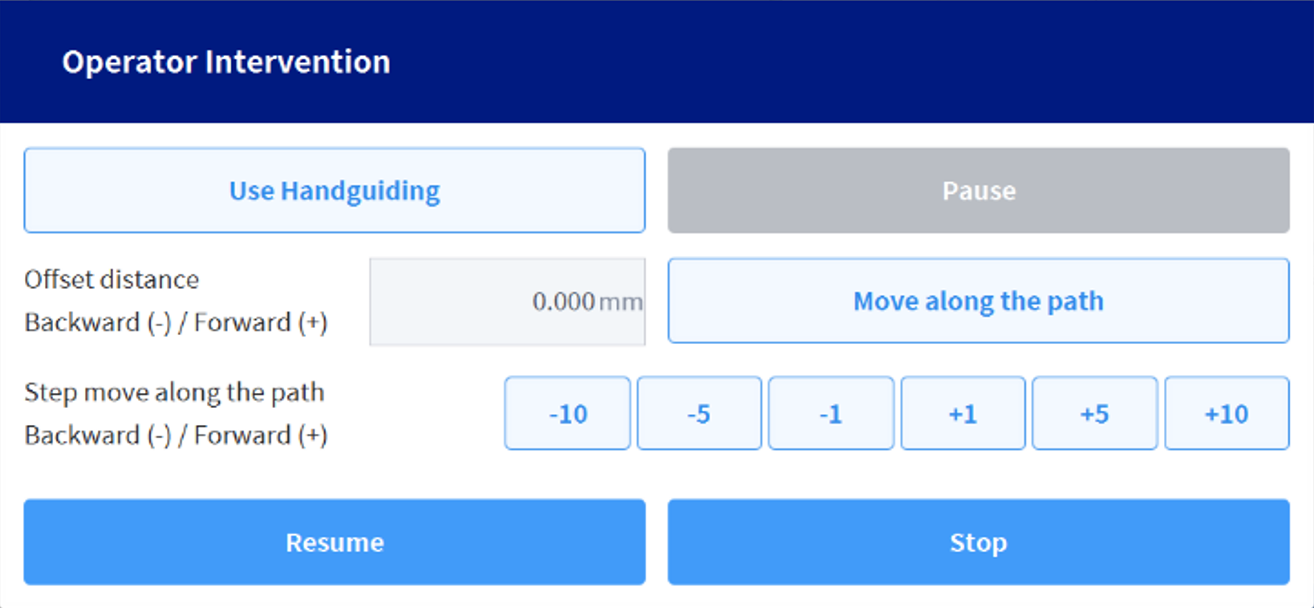
O “botão Mover ao longo do percurso” e o “botão Step Move (-10,-5,-1,+1,+5,+10)” executam a mesma ação. No entanto, o primeiro move-se para a frente ou para trás a partir da posição de referência por um deslocamento introduzido manualmente, enquanto o último aponta um ponto para a frente ou para trás por um deslocamento de passo predefinido. Depois de concluir uma ação utilizando os botões acima, premir um botão adicional moverá a posição atual pelo Offset.
O “botão Usar guia manual” é ativado apenas quando é definida uma Zona Colaborativa e o estado do robô muda para o estado Guia manual, o que permite o ensino direto dentro da Zona. Depois disso, podes ativar o ensino direto premindo o botão na parte traseira da cabine ou no pendente de Ensino.
No modo de guia manual, o “botão Usar guia manual” muda para “Botão Finalizar guia manual”.
Quando pressiona o “botão Finalizar guia manual”, o estado de guia manual termina. Neste momento, por razões de segurança, a posição atual do robô, o ângulo e os valores do ponto de paragem (momento em que ocorre o primeiro pop-up) são comparados para gerar um pop-up. Se ocorrer um pop-up com o seguinte conteúdo, deverá voltar a ensinar diretamente para corrigir a posição e postura do robô e tentar novamente.
Se a distância em linha reta entre a posição atual do TCP e o TCP na posição de paragem diferir em mais de 20 cm
Se a diferença entre o Ângulo de Articulação atual e o Ângulo de Articulação no ponto de paragem diferir em mais de 1~3 eixos (10 graus) / 4~5 eixos (30 graus) / 6 eixos (60 graus)
Esta funcionalidade é suportada apenas durante operações MoveL/MoveC/MoveB.
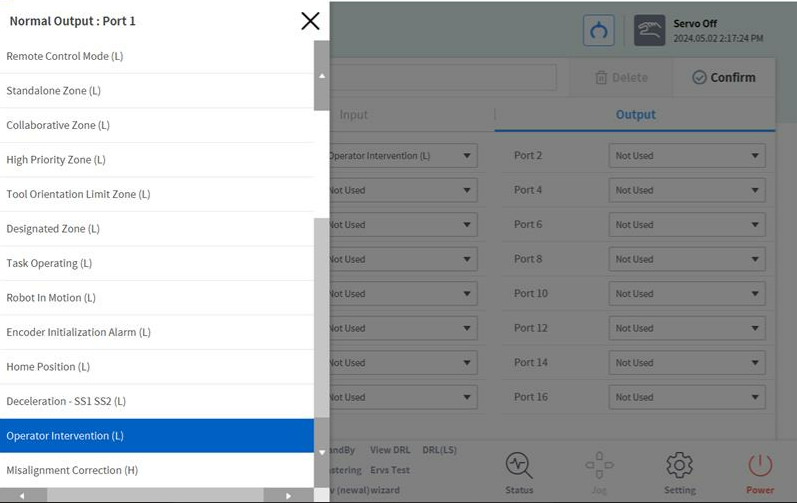
Pode utilizar a função Saída Normal para sinalizar que ocorreu um pop-up. O sinal permanecerá ativo enquanto o pop-up estiver a ocorrer e será desativado quando o pop-up terminar.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Eis o cenário de utilização:
Receba um sinal de entrada digital do utilizador ou de um dispositivo ligado enquanto o programa está a ser executado.
O robô faz uma pausa e aparece um pop-up de intervenção do operador.
(Se utilizar o ensino direto) Prima o botão Usar guia manual e, em seguida, prima o botão na parte traseira da cabine ou no pendente de ensino para ativar o ensino direto. Após a conclusão da operação de ensino direto, prima o botão Finalizar separador manual.
Pressiona o botão Mover ao longo do caminho para mover o robô ao longo do caminho.
Após mover o robô o quanto desejar, pressione o botão Continuar para retomar a tarefa do robô e fechar o pop-up.