Controlo adaptável e deteção de contacto
Graças à tecnologia de controlo de força exclusiva da Doosan Robotics, o controlo de conformidade e a deteção de contacto permitem erros de posicionamento dentro da gama permitida da peça de trabalho e dos objetos circundantes durante o movimento do robô, facilitando a aprendizagem sem tarefas repetitivas para um posicionamento preciso.
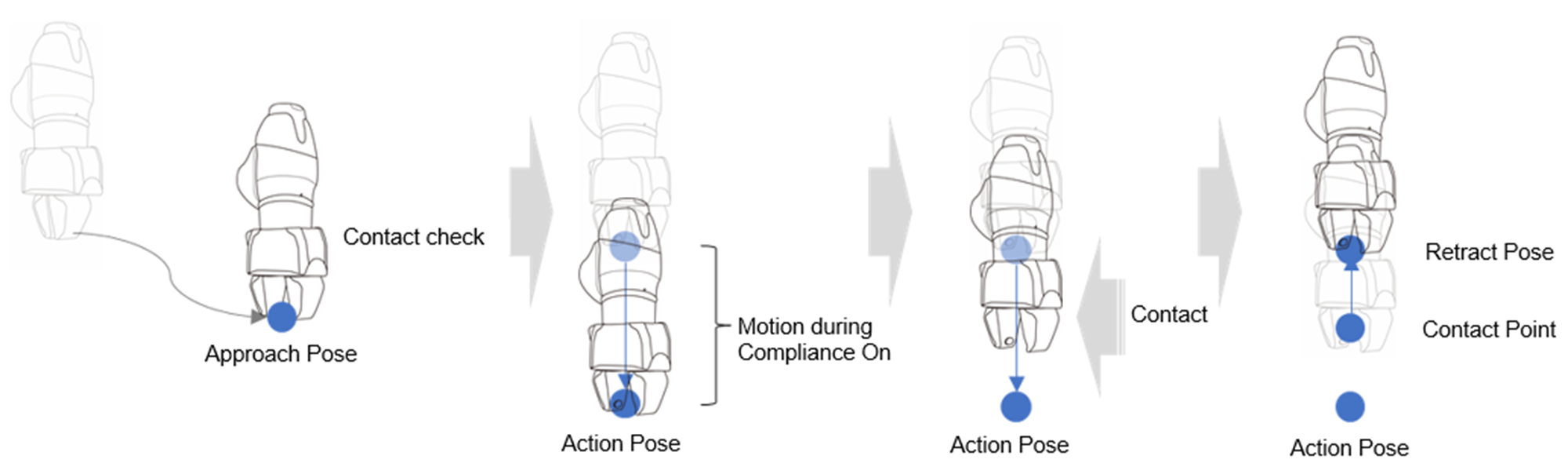
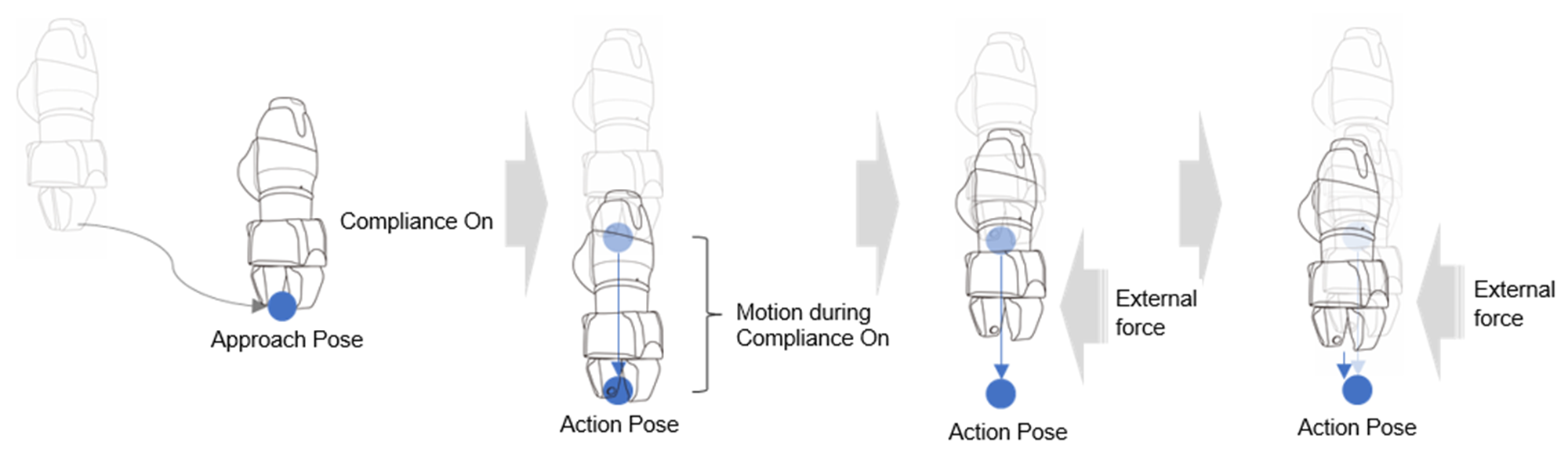
Controlo da aclimatação: Aproximação →Ação →A retração permite que o movimento se mova de uma posição fixacom uma ligeira recuperação tipo mola quando forçado a partir do exterior.
Deteção de contacto: Reconhece o contacto com um alvo com base na força de contacto introduzida pelo utilizador e nos valores do intervalo de avaliação do contacto, para nesse ponto e aciona a pinçapara escavar o alvo.
- Deve ser utilizado em conjuntocom a funcionalidade de controlo de conformidade. Se a força for introduzida e o controlo adaptável não for ligado, ocorre um erro.
- A deteção de contacto é uma funcionalidade que deteta quando o contacto ocorre com um ambiente externo, pelo que deve definir a sensibilidade da deteção de colisão para uma definição menos sensível ou desligá-la antes da utilização.
- Ao utilizar a função de deteção de contacto, pode selecionar a opção da função de controlo adaptável para selecionar a rigidez da direção de trabalho (por exemplo: Direção Z ) , que pode causar contacto externo excessivo e força excessivase aumentar o valor ou aumentar a velocidade. (Deve ajustar o valor em conformidade, dependendo da aplicação, por exemplo, reduzir o valor de rigidez quando a operação é mais rápida ou aumentar o valor de rigidez quando a operação é mais lenta.