
Compreender o movimento do robô
MENDATORY EASY 5 MIN
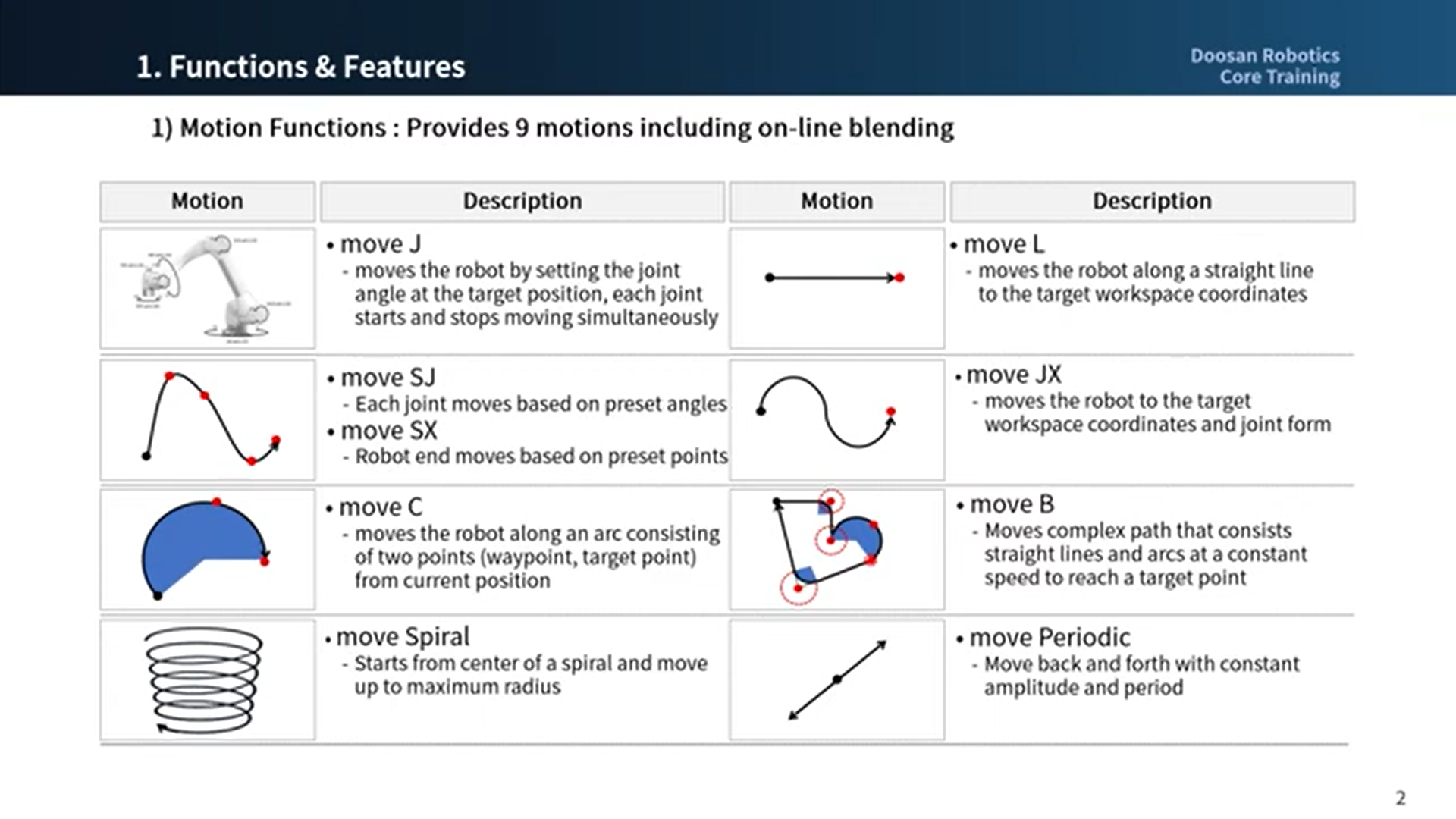
Tipos de movimento do robô
| Motion | Feature | |
|---|---|---|
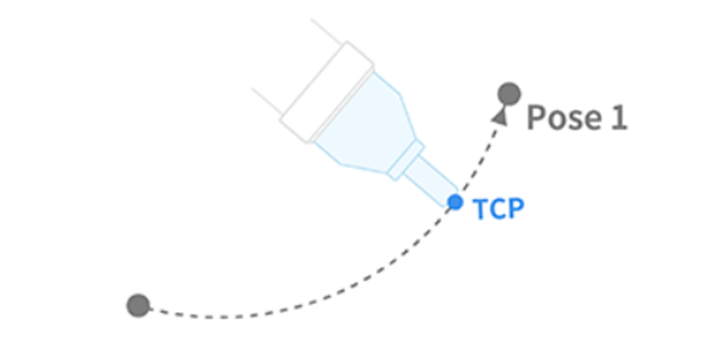
| 1 | MoveJ | Cada junta do robot move-se simultaneamente do ângulo atual para o ângulo alvo e para simultaneamente
|
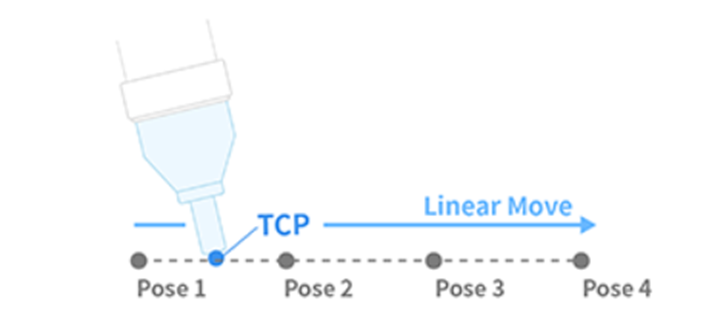
| 2 | MoveL | Move o TCP do robô para o ponto de destino, mantendo a linha
|
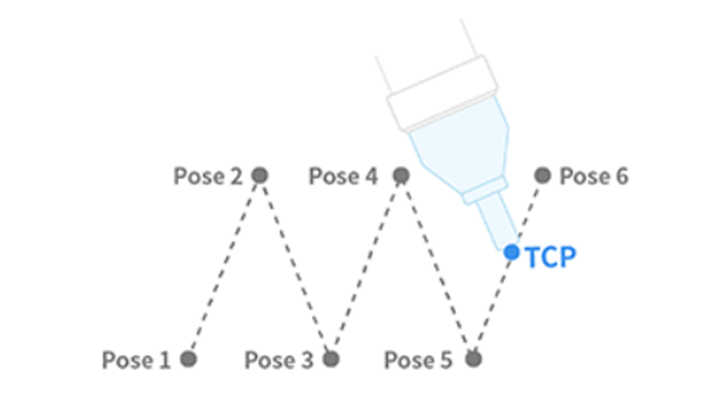
| 3 | MoveSJ | Percorra todos os ângulos definidos pelo robot
|
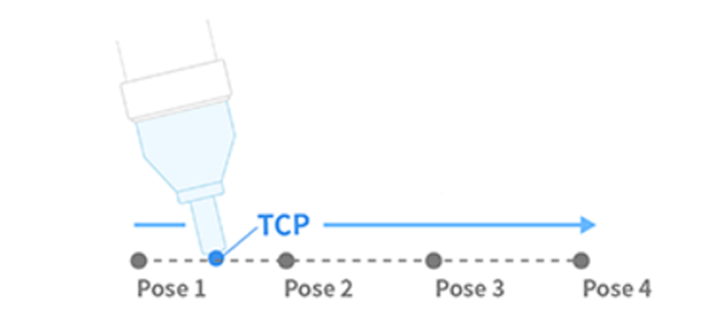
| 4 | MoveSX | O robô TCP passa por todos os pontos
|
| 5 | MoveJX | Mova a posição do robô aleatoriamente quando o TCP do robô se move para o ponto alvo
|
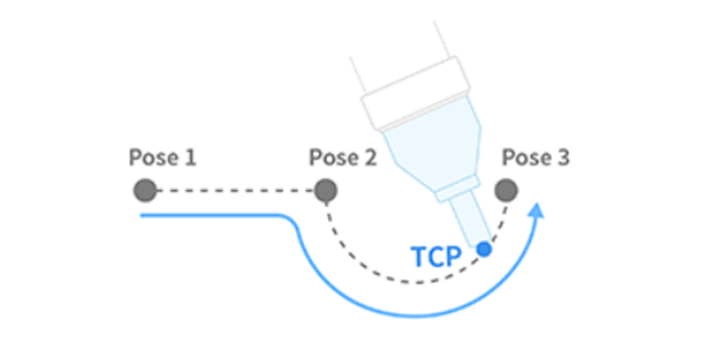
| 6 | MoveC | O Robot TCP mantém o arco e move-se para o ponto alvo
|
| 7 | MoveB | Deslocação constante da velocidade linear e do arco até ao ponto alvo final
|
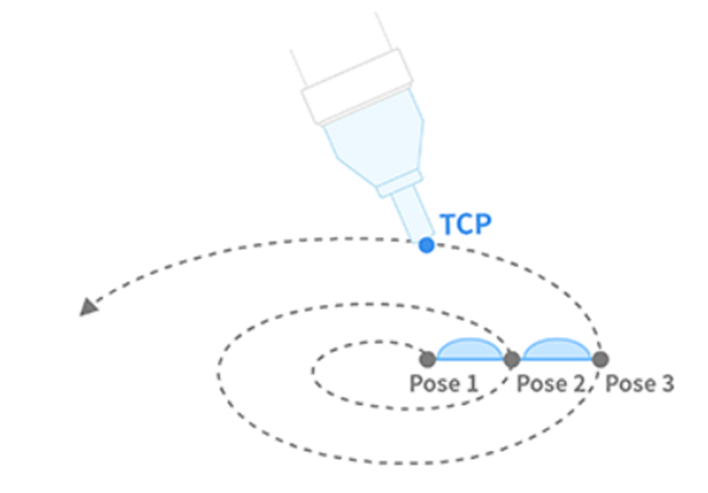
| 8 | MoveSpiral | Começando no centro da hélice até ao raio máximo
|
| 9 | MovePeriodic | Amplitude constante e curso do ciclo
|
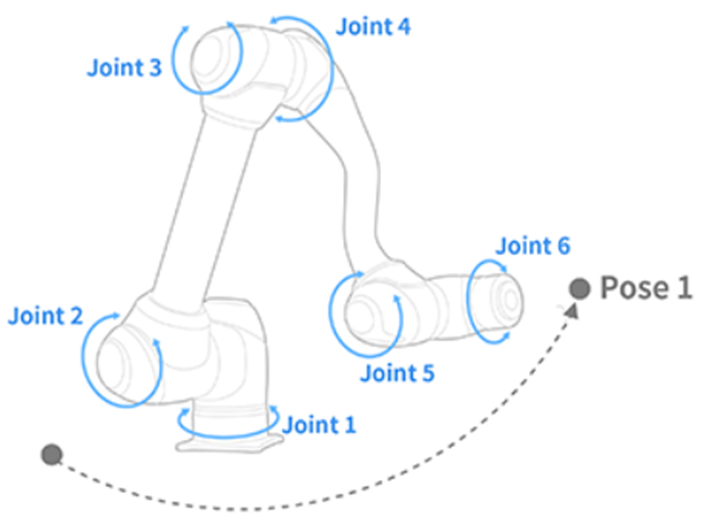
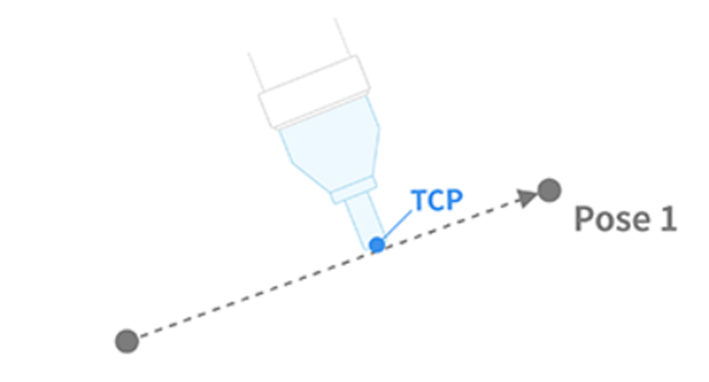
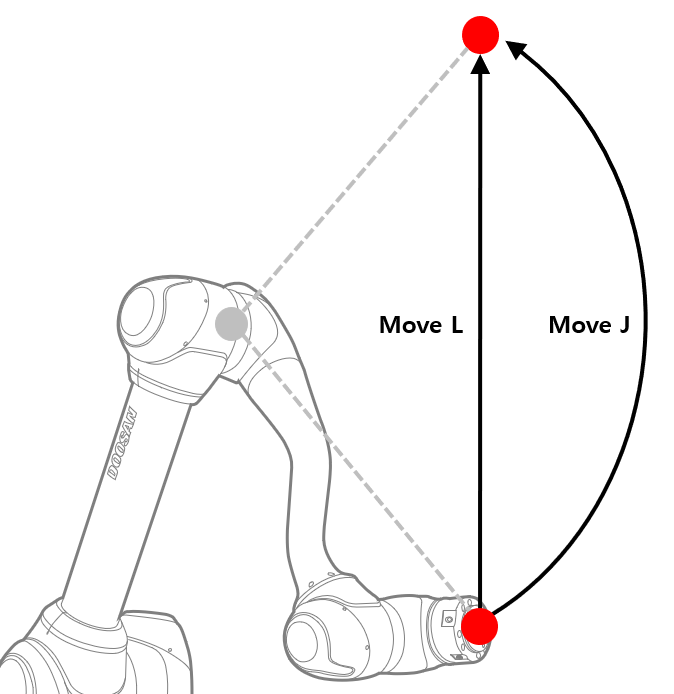
MoveJ&MoveL
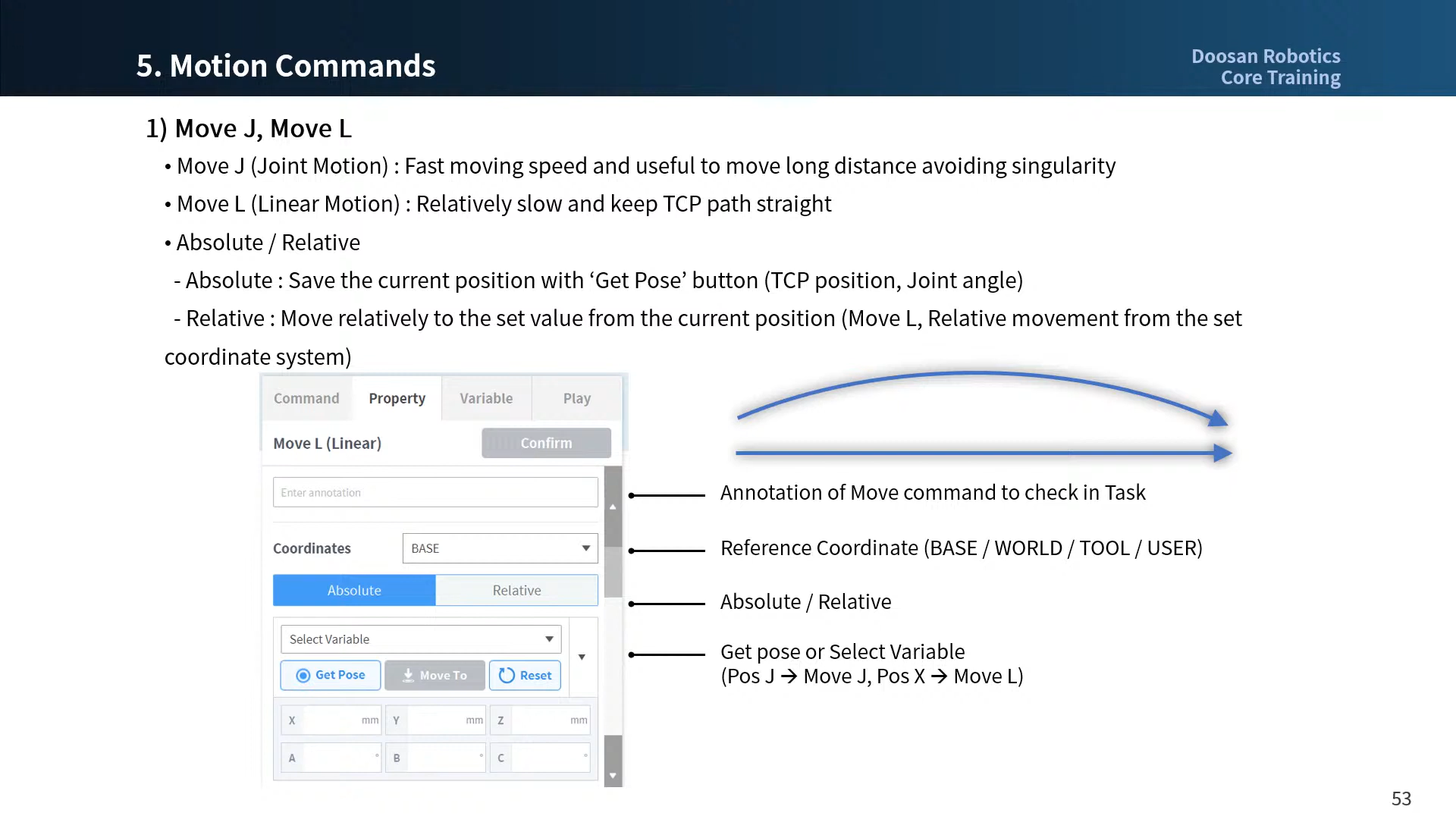
- Em MoveJ, J significa Joint. Este movimento move cada junta simultaneamente para o ângulo alvo e para ao mesmo tempo.
- Em MoveL, L significa Linear. Este movimento é movido linearmente para a posição alvo (posição e ângulo de rotação) pelo TCP na extremidade do robô.
| Type | MoveJ | MoveL | |
|---|---|---|---|
| 1 | Em movimento |
|
|
| 2 | Benefícios |
|
|
| 3 | Contras |
|
|
| 4 | Utilização |
|
|