
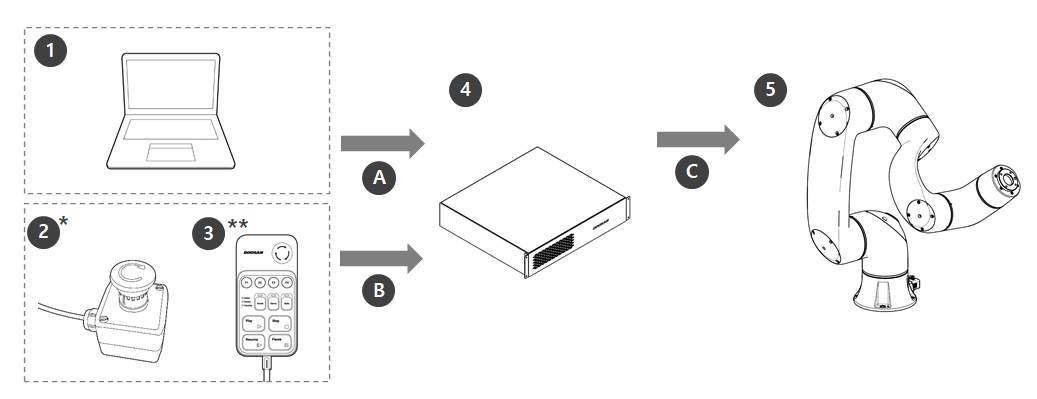
Gráfico de configuração do sistema
Número | Nome | Descrição |
|---|---|---|
Número | Nome | Descrição |
| 1 | Computadores portáteis | Após a instalação da Plataforma DART, o ambiente de trabalho pode ser configurado como um pendente de cadela. O computador portátil não está incluído na caixa e é necessário para a instalação e utilização da plataforma DART. |
| 2 | Botão de paragem de emergência * | Como componente padrão, ele atua como um botão de parada de emergência no dispositivo Teach pendente ao usar um laptop. |
| 3 | Pendente inteligente * * | Pendentes fáceis de usar que executam funções simples como ativação/desativação do servo ou execução/desativação de um programa definido, permitindo um controlo fácil do robô. |
| 4 | Controlador * | Ajusta o movimento do robô de acordo com a posição ou o movimento definido no dispositivo Teach-Pendant. A vasta gama de portas de E/S permite-lhe ligar e utilizar uma grande variedade de dispositivos e dispositivos. |
| 5 | O popular * | Um robô cooperativo industrial que pode ser utilizado para transportar objetos ou montar componentes e pode ser utilizado com uma variedade de ferramentas instaladas. |
| A | Comando/Monitor | |
| B | Comandos | |
| C | Alimentação/Rede |
- Componentes principais (*) e opçõeses (* * *, vendidos separadamente)