
Defina as coordenadas do mundo
Pode configurar um sistema de coordenadas que represente a área de trabalho, incluindo o robô e o alvo do trabalho. Esse sistema de coordenadas é chamado Sistema de Coordenadas Mundial e é distintodo sistema de coordenadas base fixado à Base do robô. Você pode definir a pose do sistema de coordenadas base em relação ao sistema de coordenadas mundial e também pode selecionar o sistema de coordenadas mundialao ensinar e especificar movimento com o robô no Task Builder e no Task Writer. 
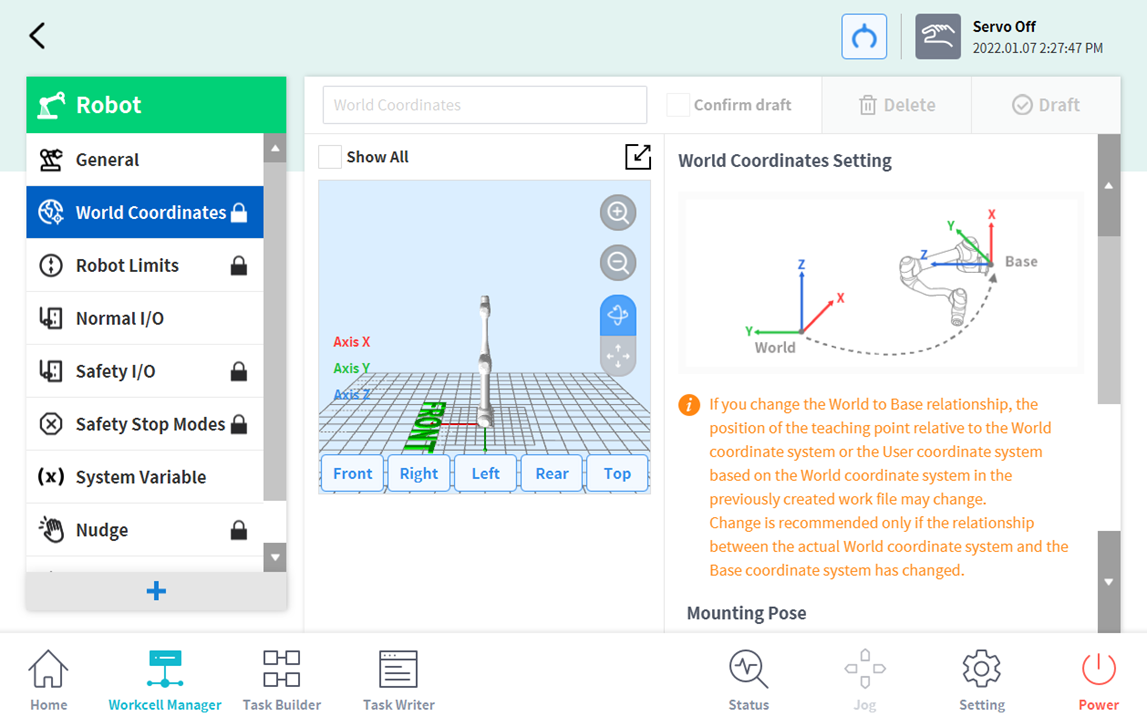
- Toque em Editar na parte superior para aceder às definições.
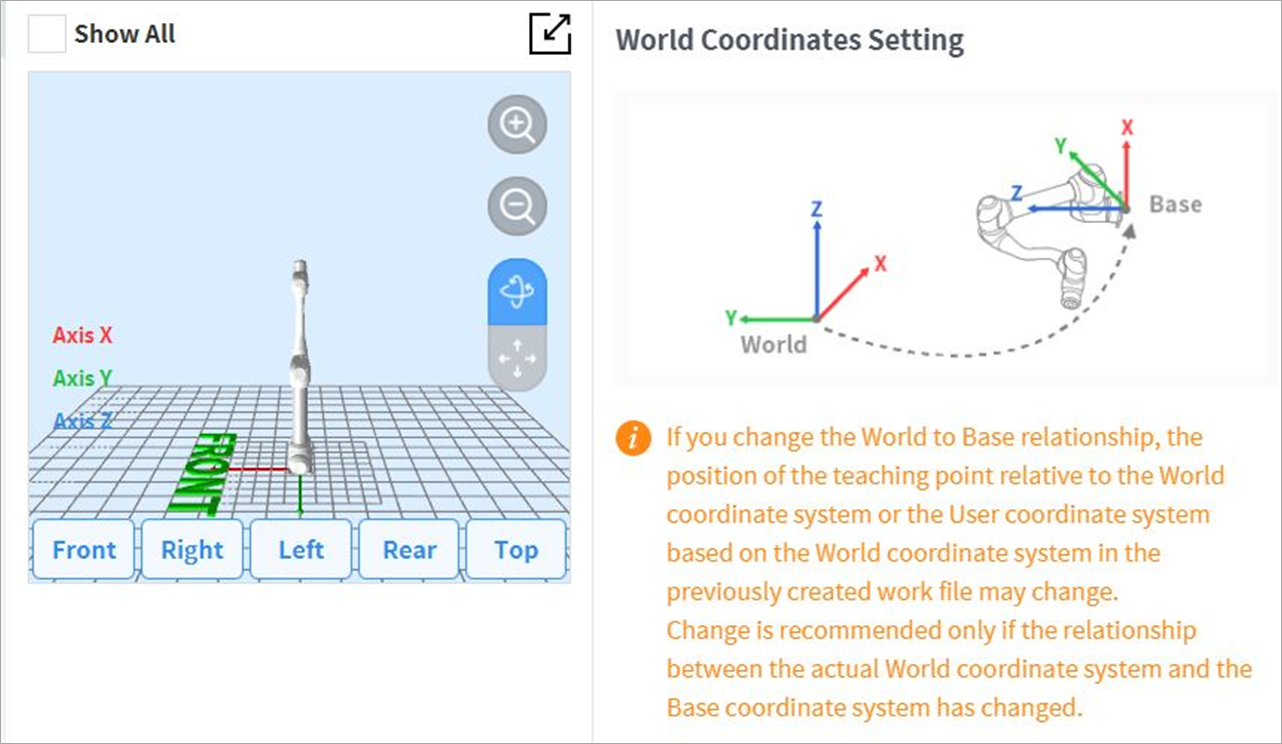
Consulte as ilustraçõese advertências que ilustram a relação entre o Sistema de Coordenadas Mundial e o Sistema de Coordenadas Base.
Aviso
Se alterar a relação entre as bases mundiais, a localização do ponto de intersecção do Sistema de Coordenadas Mundial ou do seu próprio sistema de coordenadas com base no Sistema de Coordenadas Mundial num ficheiro de trabalho criado anteriormente pode mudar. Recomenda-se que você altere o relacionamentoentre o sistema de coordenadas mundo real e o sistema de coordenadas base somente se ele tiver sido alterado.
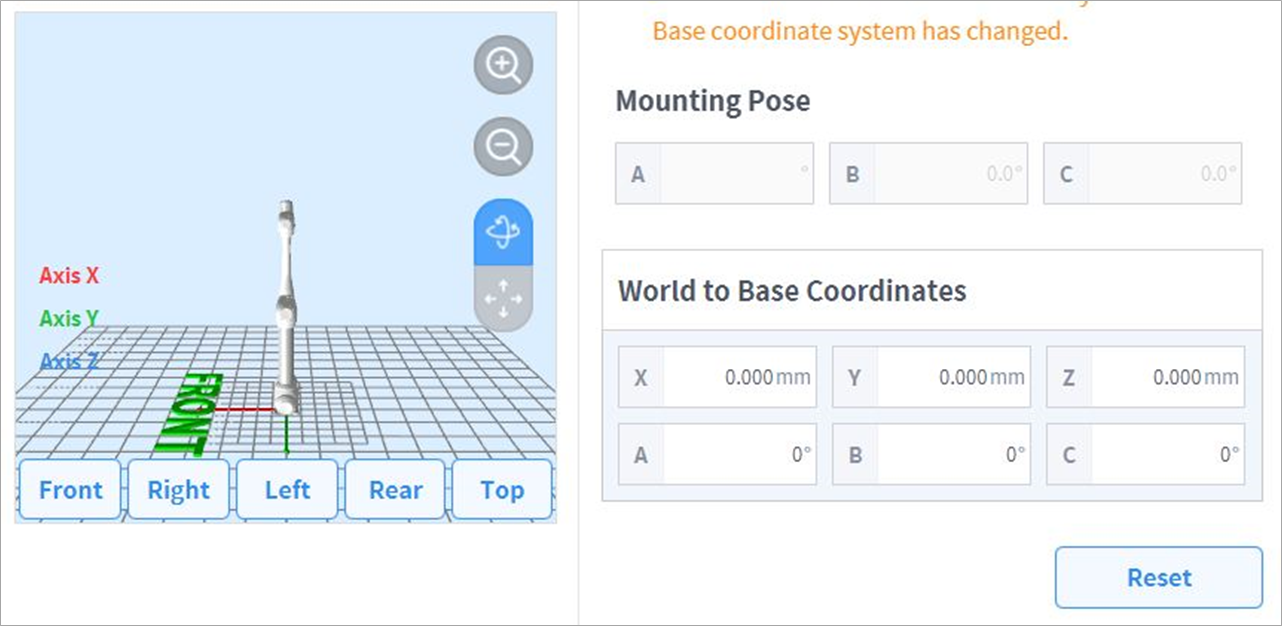
- O batente do lado direitoapresenta a posição de montagem (inclinação de instalação) definida pelo utilizador. A direção Z do Sistema Mundial de Coordenadasestá geralmente no teto, porque o Sistema Mundial de Coordenadas descreve o ambiente de trabalhoa partir da referência do usuário. Uma vez que o sistema de coordenadas baseé um sistema de coordenadas fixo ao plano inferior dos 1 eixos do robô, a relação sistema de coordenadas base sistema de coordenadas mundial muda dependendo da posição/posição de instalação do robô. No exemplo acima, o robot está montado numa parede. Neste caso, oeixo Z do sistema de coordenadas da baseé perpendicular à parede e o eixo Y do sistema de coordenadas mundial está alinhado na ilustração e a posição de montagem é apresentada como 90 graus de inclinação e 0 graus de rotação. Orelacionamento World-Base é um relacionamento visto do Sistema de Coordenadas Mundial com relação ao Sistema de Coordenadas Base. Se tiver uma disposição pré-determinada do seu ambiente de trabalho, configure-a em conformidade. Os valores X/Y/Zindicam movimento e os valores A/B/C indicam rotação da definição Z-Y-Z. Se a posição de montagem for definidade acordo com a instalação do robot, é adequado utilizar B/C na posição de montagem para o ângulo de rotação B/C. No entanto , se configurar a pose de montagem utilizando a funcionalidade de estimativa automática, recomenda-se que siga o ângulo de rotação definido no esquema, uma vez que a estimativa pode incluir um erro.
- Toque no botão Aplicar.
- Toque no botão OK.
Saber
Depois de aplicar gradientes de instalação a partir da versão de software GF020400 ou anterior, os programas de operador criados pelo Task Builder e pelo Task Writer devem definir o Sistema de Coordenadas Mundial para refletir a inclinação de instalação ao atualizar para a versão GF020400 ou posterior e converter todos os sistemas de coordenadas base definidos no programa para o Sistema de Coordenadas Mundial para ter o mesmo ponto de intersecção E outros dados
Se trabalhar num espaço de trabalho colaborativo com vários robôs, ou se o robô estiver instalado num dispositivo móvel, como uma base móvel ou um trajeto linear, a relação entre o trabalho e a base do robô e a posição do ponto de intersecção pode flutuar, e pode configurar um sistema de coordenadas mundial para unir o trabalho e partilhá-lo facilmente.
Se a ferramenta for inicialmente instalada no robot ou se a ferramenta tiver sido alterada, o peso da ferramenta tem de ser definido antes de o robot ser utilizado. Definição do peso da ferramenta Consultepara obter mais informações sobre a definição do peso da ferramenta.