
Ecrã do modo real: Separador I/O Information (Informações de E/S)
A guia Informações de entrada/saída na tela Reproduzir no modo físico do Task Builder é organizada da seguinte maneira:
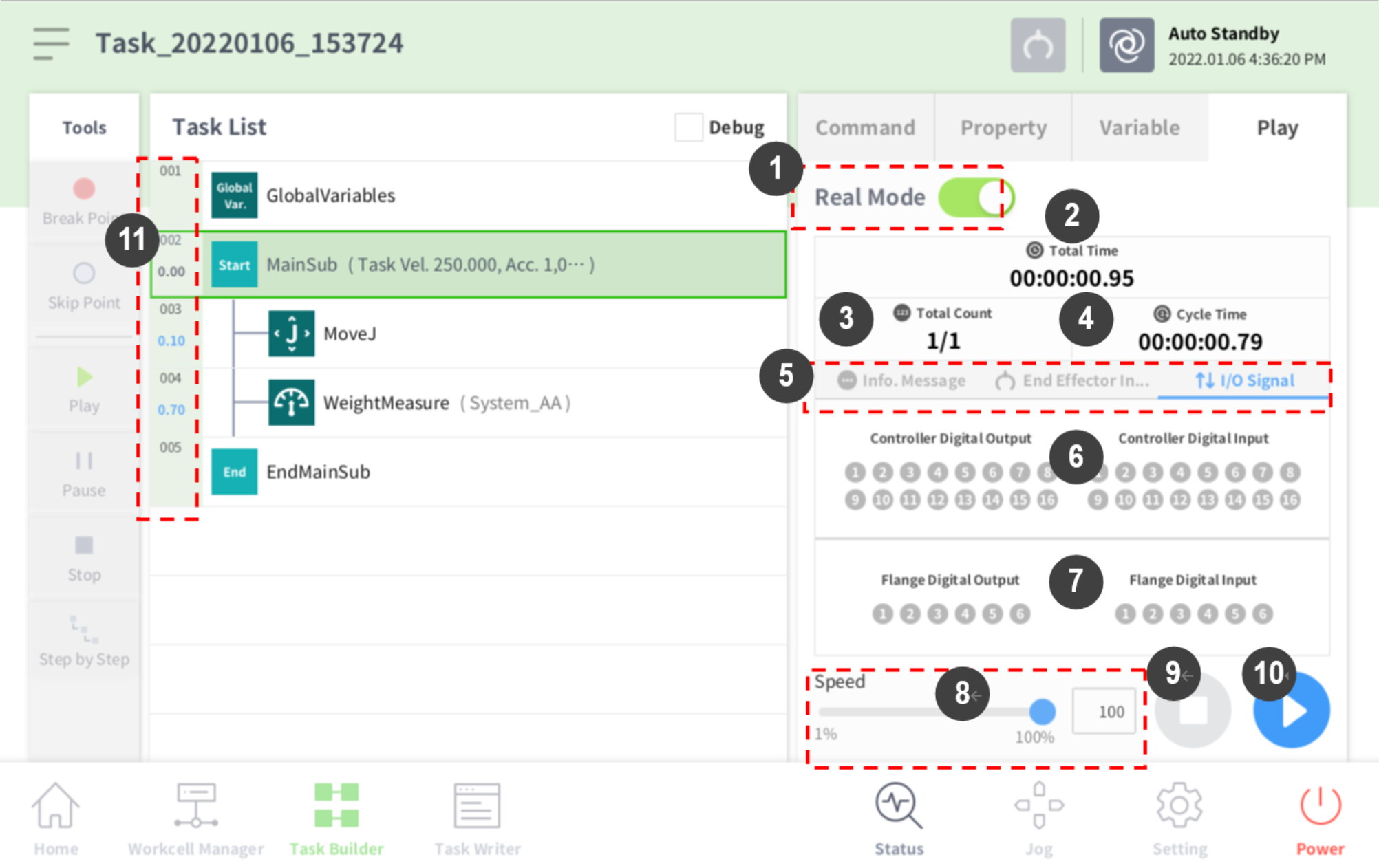
Número | Item | Descrição |
1 | Modo real | Alterna o modo de teste de reprodução do robô.
|
2 | Tempo total | Exibe a quantidade total de tempo desde que a tarefa foi executada. |
3 | Contagem total | Apresenta o número de vezes que a tarefa foi executada. |
4 | Tempo médio tomado | Apresenta a quantidade média de tempo que demora a realizar um trabalho na lista de tarefas. |
5 | Separador de transições de informações | Pode alternar entre o ecrã de mensagens de informação do robot, o ecrã de informações de fator final e o ecrã de informações de entrada/saída.
|
6 | Sinais de entrada e saída digitais do controlador | Apresenta os sinais de entrada e saída digital do controlador para a tarefa atualmente em execução.
|
7 | Sinais de entrada e saída digitais de flange | Apresenta os sinais de entrada e saída digitais da flange para a tarefa atualmente em execução.
|
8 | Cursor de velocidade | Pode definir a velocidade do robot no modo físico ou virtual. |
9 | Botão de paragem | Pára uma tarefa em execução. |
10 | Botão de alternância Reproduzir/Pausar | Pode reproduzir ou colocar um trabalho em pausa na lista de tarefas. |
11 | Duração | Exibe a quantidade de tempo gasto na execução desse comando/especialidade. |

Cuidado
Apenas duas das flanges iOS no ecrã de informação de E/S da série A são monitorizadas.