Compreender as Propriedades do Movimento do Robô
MENDATORY NORMAL 15 MIN
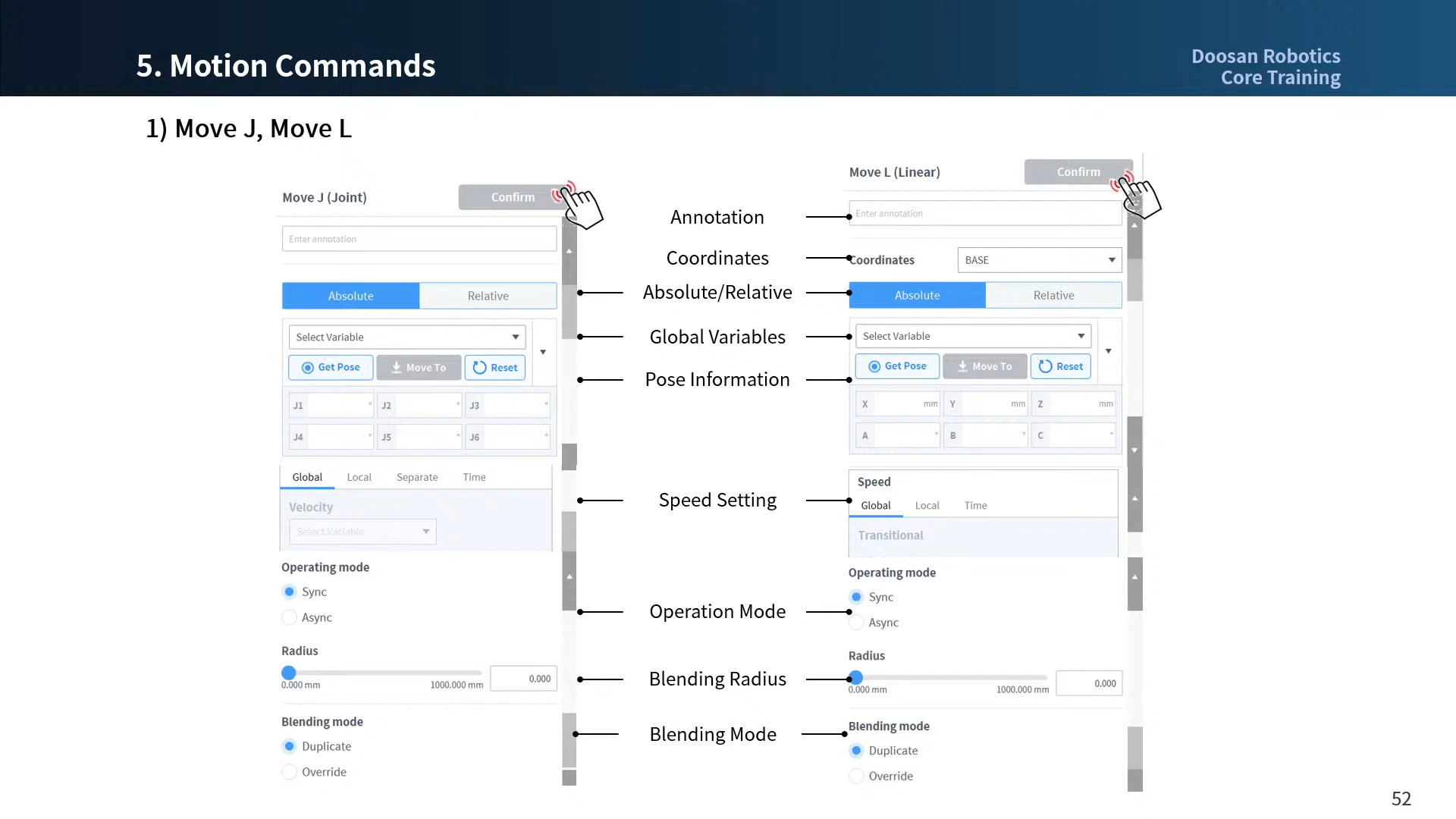
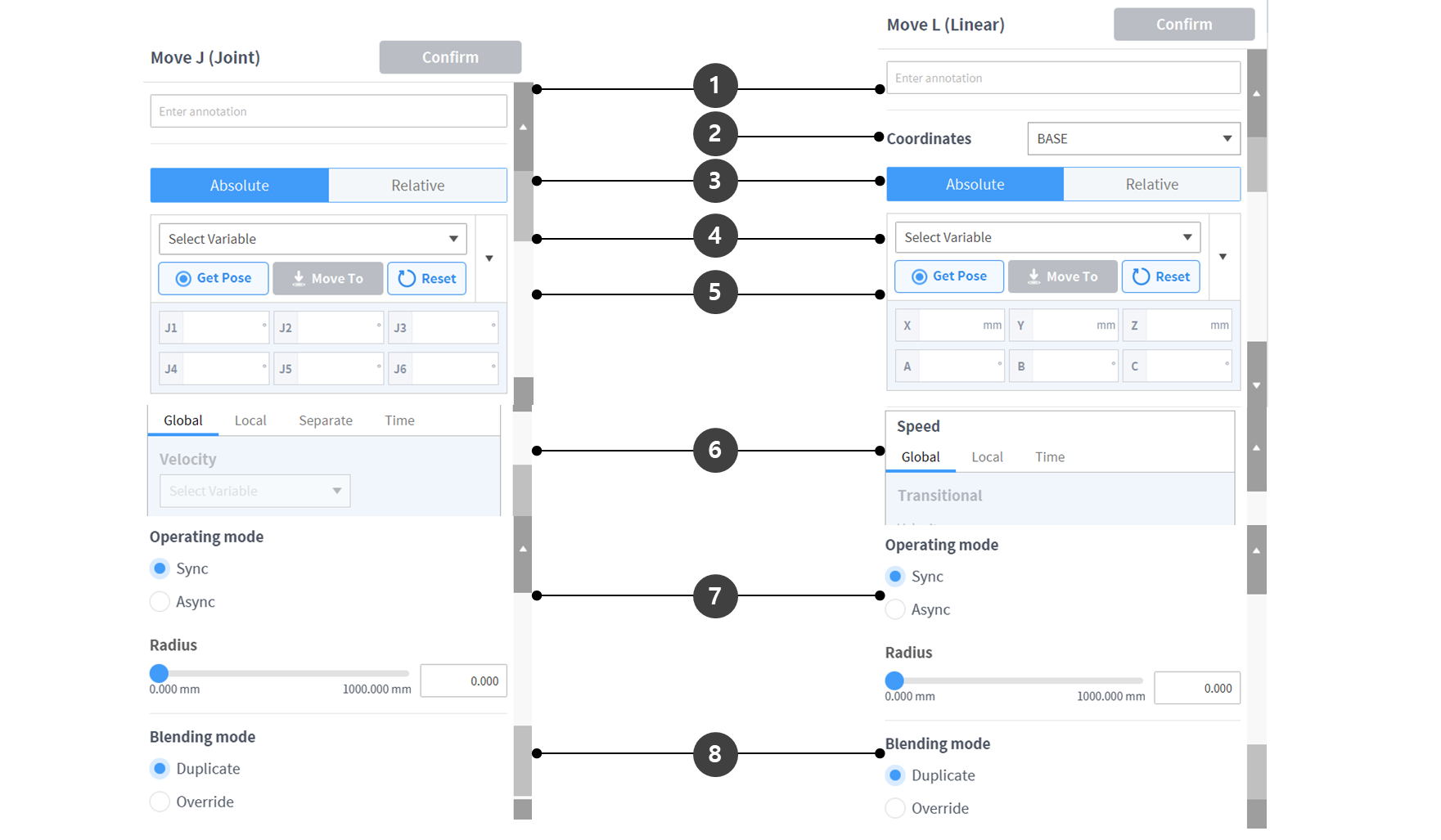
- Ao criar um movimento com definições mínimas, só tem de introduzir as informações da postura (número 5 na figura abaixo).
| Nome | Descrição | |
|---|---|---|
| 1 | Anotação | Verifique na janela Tarefa Descrição ou comentário deste comando |
| 2 | Sistema de coordenadas |
|
| 3 | Selecione um tipo de movimento |
|
| 4 | Selecione o parâmetro | Selecção variável das informações de posição registadas |
| 5 | Informações de posição | Entrada de informações de posição recebida
|
| 6 | Definição de velocidade |
|
| 7 | Modo de funcionamento |
|
| 8 | Modo de liquidificação | A opção que determina se deve manter o movimento para a frente ou substituir o movimento da derivação com base no modo de combinação do movimento de saída quando o raio é aplicado às opçõeses do movimento para a frente |
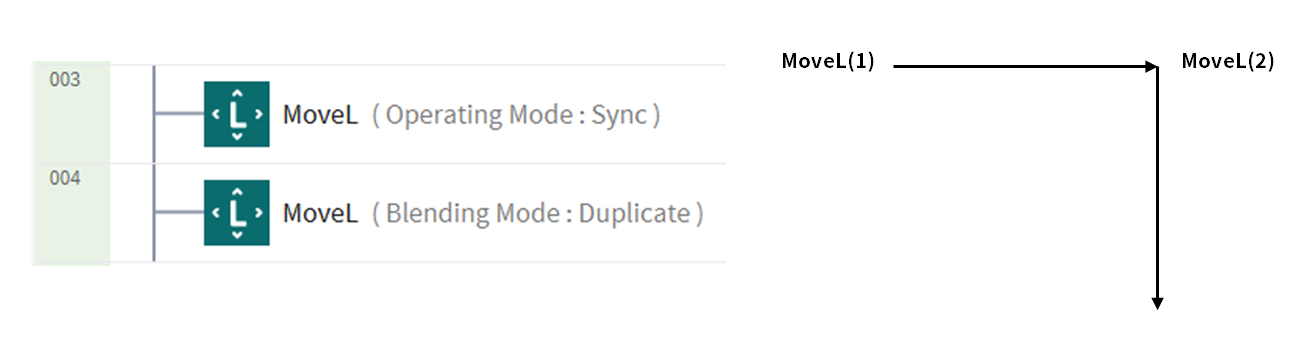
Modo de funcionamento
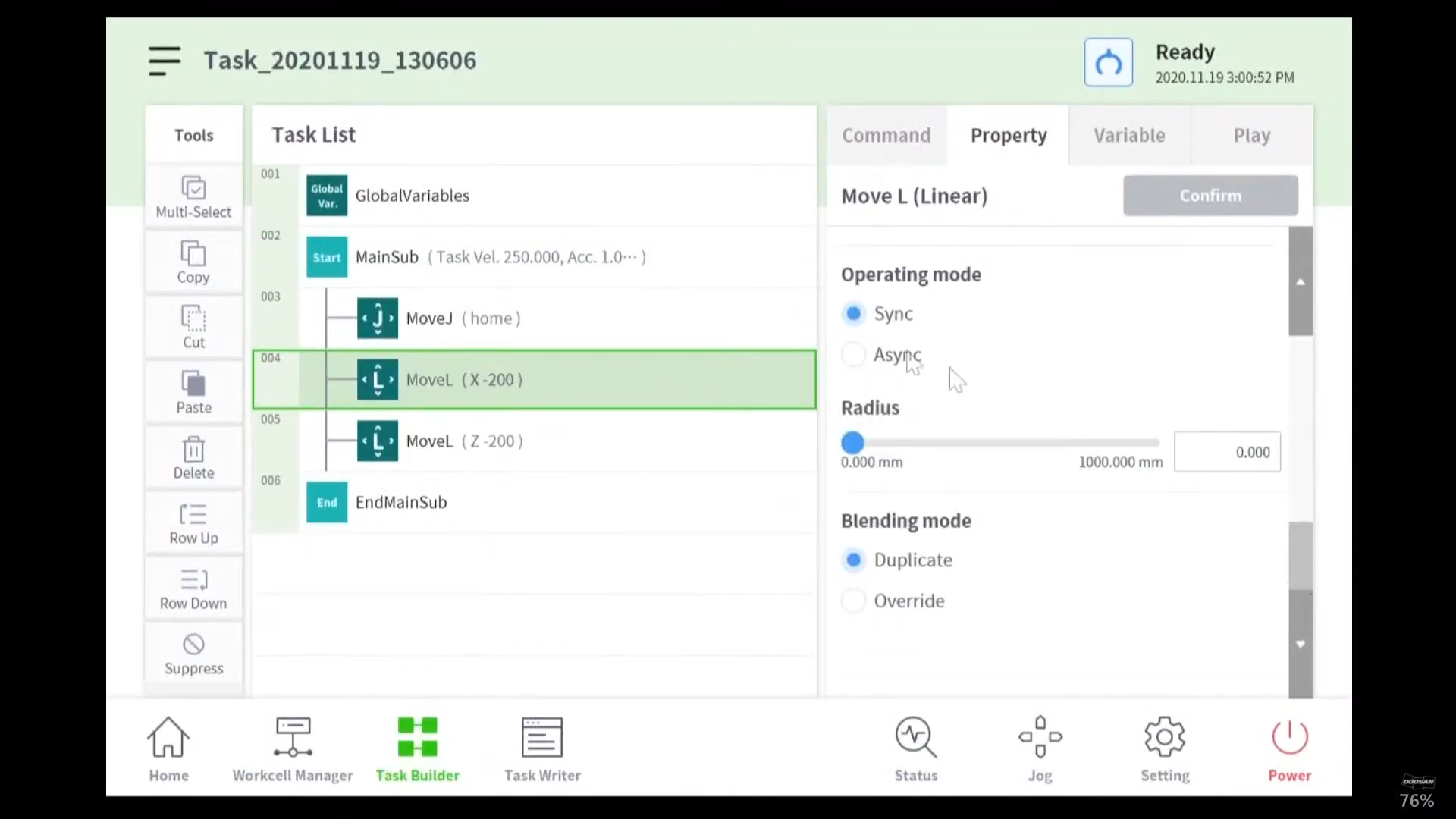
Sincronizar
A sincronização move-se para o próximo comando depois que o comando de movimento ativo for concluído. Modo definido para o valor predefinido e é utilizado em situações comuns.
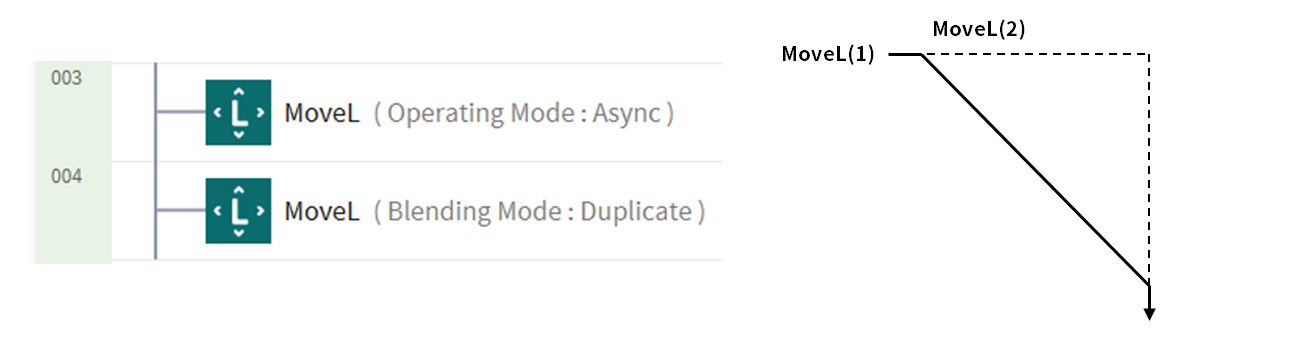
Assíncrono (Async)
Assíncrono executa o seguinte comando assim que o comando de movimento é iniciado: É utilizado principalmente para uma ligação suave entre movimento e é utilizado para controlo de força, para ligar/desligar a saída do sinal de mudança de direção ao mesmo tempo que o movimento é iniciado.
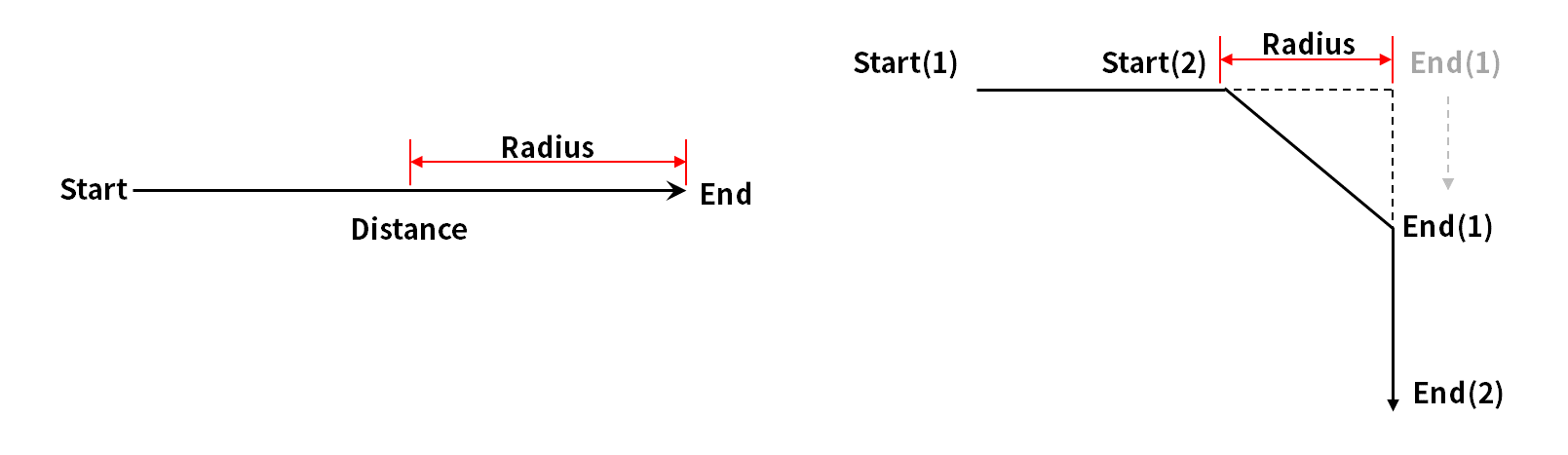
Raio
A opção Raio ativa funções assíncronas na seção Raio antes de alcançar o ponto de chegada de um comando de movimento. Esta opção permite-lhe mover-se suavemente para o comando de movimento seguinte sem parar para o comando de movimento. O raio está definido para 0 mm por predefinição.
Cuidado
As opçõeses de raio têm as seguintes caraterísticas e limitações:
- A funcionalidade Radius está disponível apenas com Sync (Sincronizar).
- Instruções condicionais e operações podem ser executadas em segmentos assíncronos (Async) dentro de um raio.
- O raio não pode exceder 1/2 da distância total de deslocação entre a localização atual e a localização alvo antes de o movimento ter sido realizado.
- ex. Para uma distância de deslocação de 100 mm, o raio máximo que pode ser definido é de 50 mm.
- Os seguintes comandos de movimento não estão disponíveis para misturar entre movimento. Uma vez que estes comandos já foram misturados, a utilização destes comandos após a aplicação do valor do raio resultará num erro. O uso adequado de comandos como WaitMotion e StopMotion pode ajudar a evitar isso.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
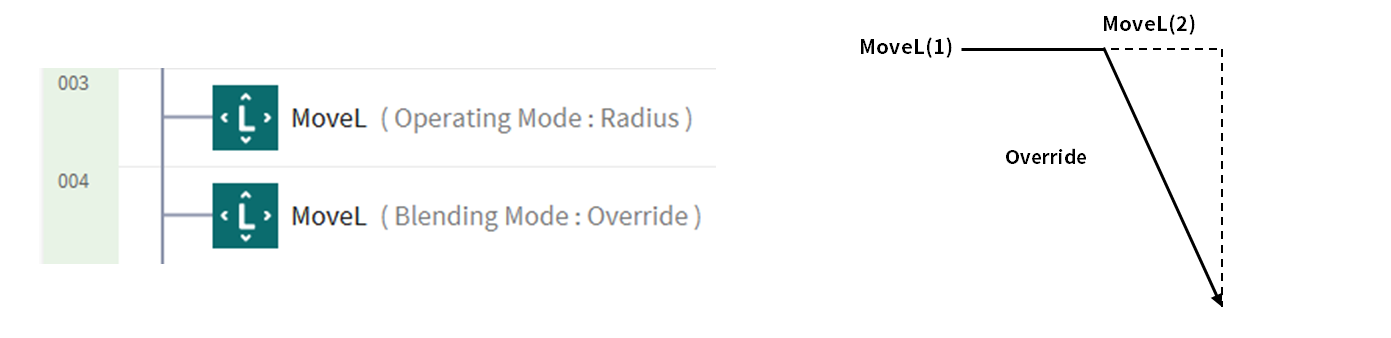
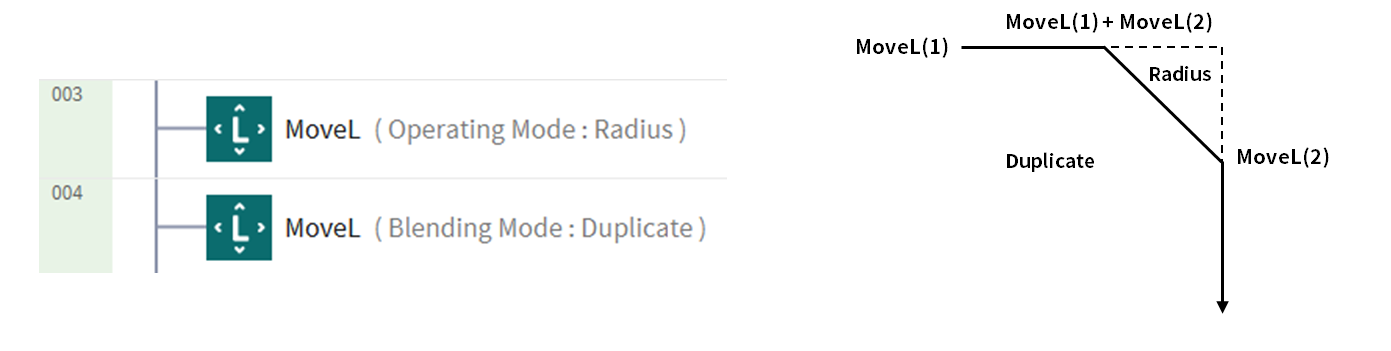
Modo de liquidificação
Esta opção determina se deve manter o movimento avançado ou substituir o movimento avançado, com base no modo de combinação do movimento de saída, quando o raio é aplicado às opçõeses do movimento avançado
Duplicar
Overlap (Sobreposição) é um modo no qual o movimento de saída se sobrepõe ao movimento anterior, mantendo o movimento de avanço.
Anular
A anulação é um modo no qual o movimento de saída é efetuado substituindo e substituindo o movimento anterior.