
Siga o exemplo do comando MoveJ/MoveL
MENDATORY NORMAL 20 MIN
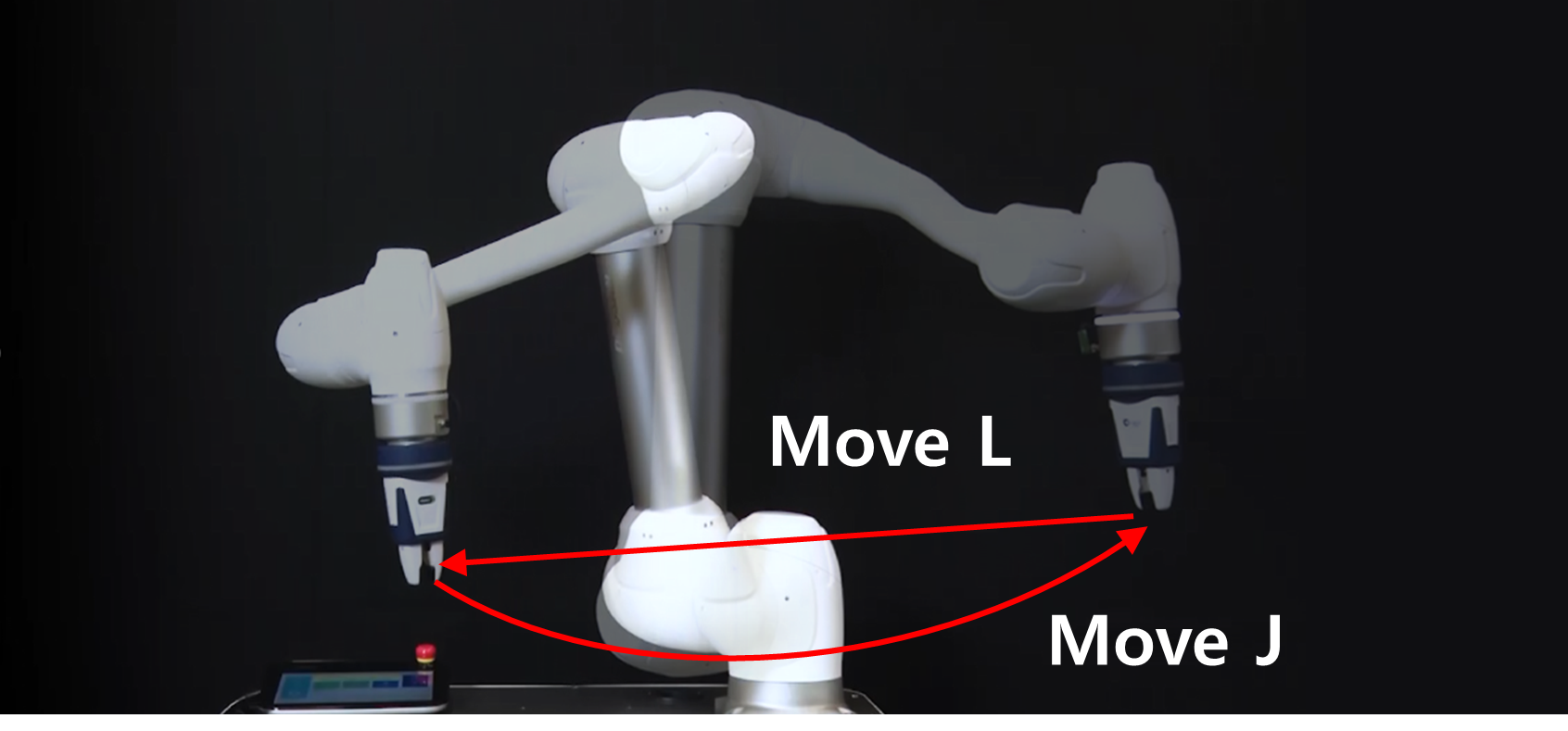
Neste exemplo, você adiciona os comandos MoveJ e MoveL no Task Builder e executa o movimento para comparar as diferenças entre os dois movimentos.
Cuidado
- Certifique-sePrecauções de utilização de que verifica antes de iniciar o exemplo. PART 1. Manual de segurançaConsulte para obter mais informações.
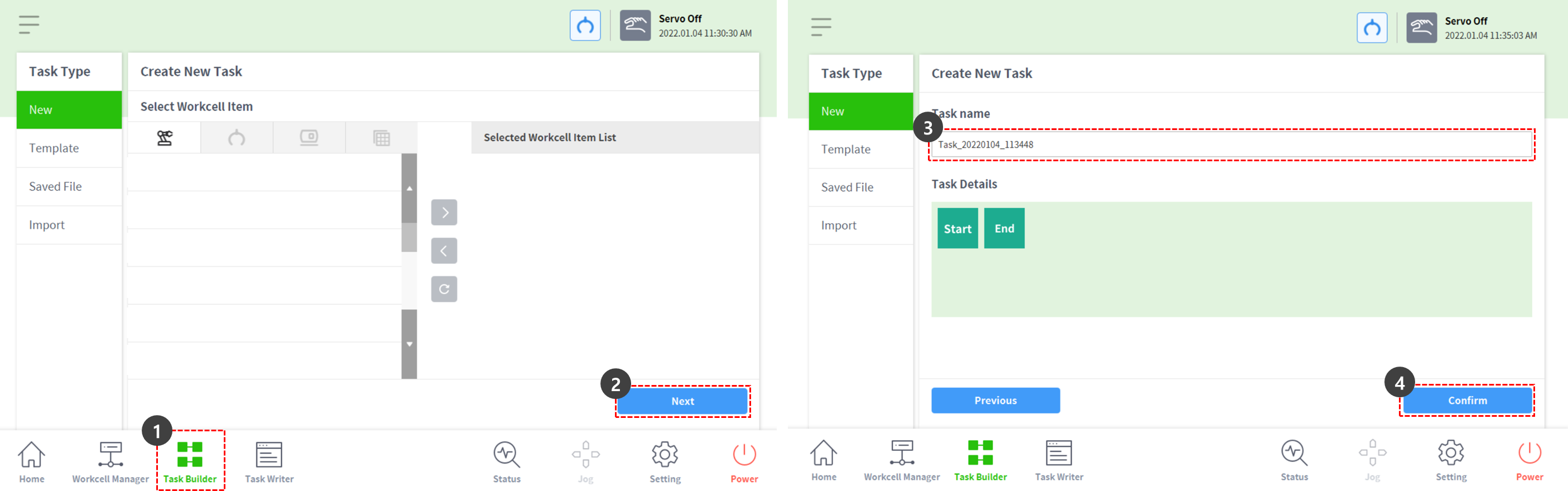
- Selecione Task Builder na barra inferior da tela.
- A programação no Task Writer é quase idêntica ao construtor de tarefas.
- Toque no botão Seguinte.
- Se estiver a utilizar um item de célula de trabalho registado, como uma pinça, para configurar o programa, tem de adicionar um item de célula de trabalho.
- Neste exemplo, não usamos itens e habilidades de células de trabalho, então selecione Nada e pressione o botão Avançar.
- Crie um nome de tarefa.
- Prima o botão de confirmação.
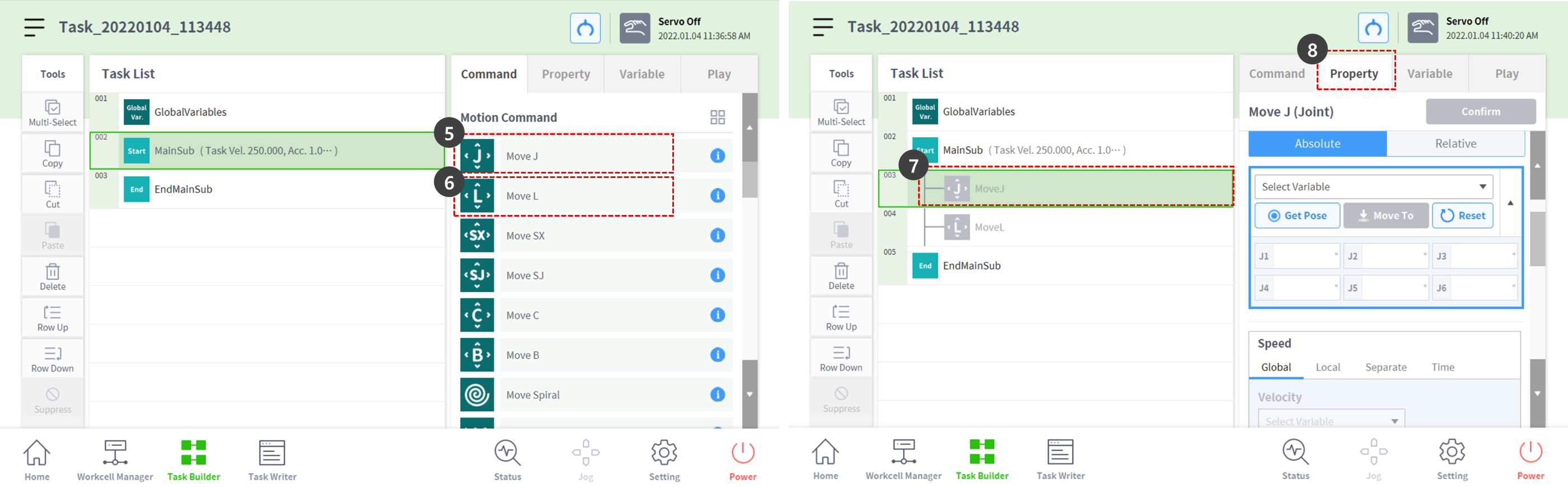
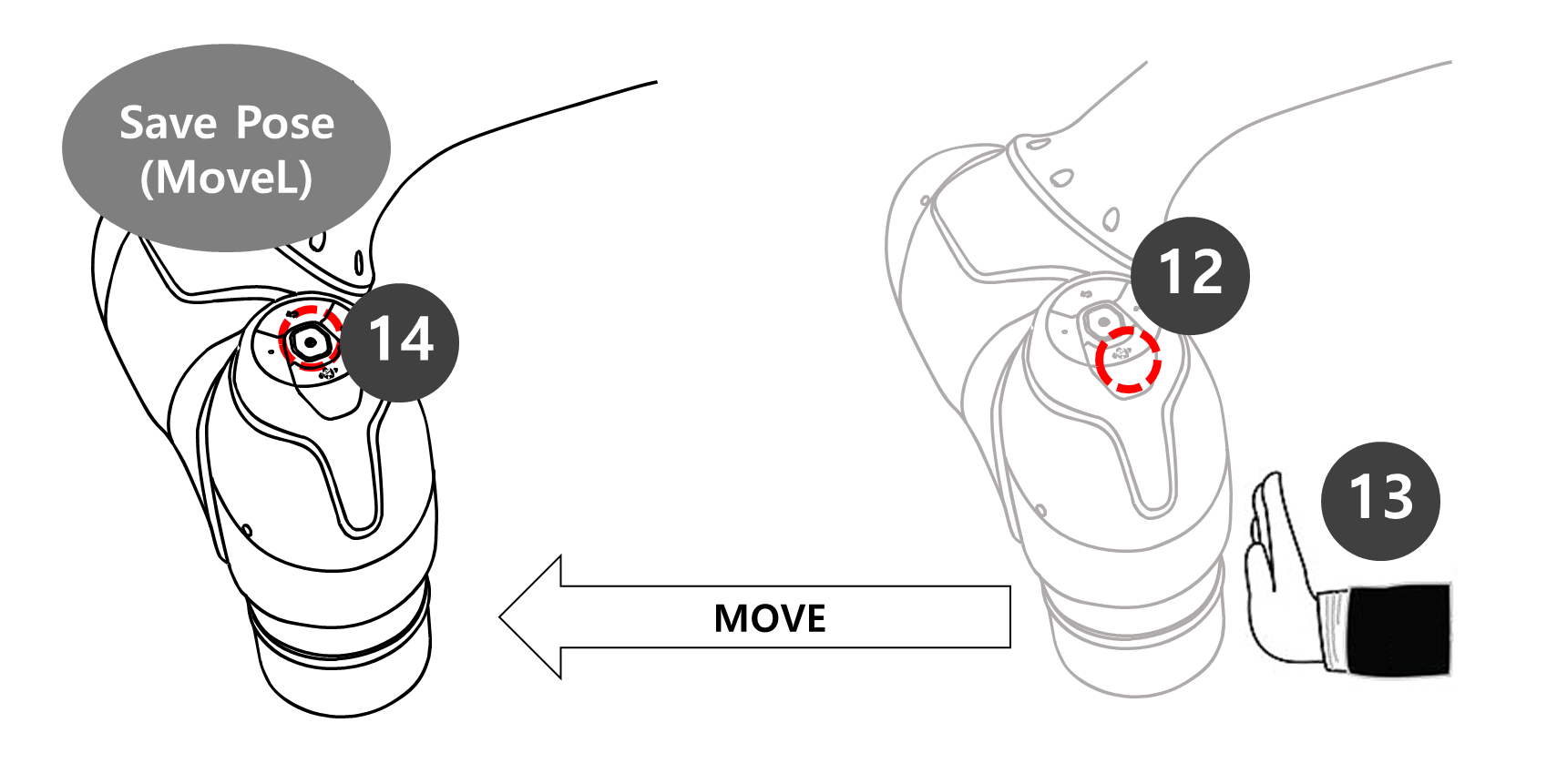
- Com MainSub selecionado na segunda linha, pressione MoveJ para adicionar o comando MoveJ à lista de tarefas.
- O comando é adicionado à linha seguinte da linha selecionada.
- Clique em MoveL para adicionar o comando MoveL à lista de tarefas.
- Selecione MoveJ na terceira linha da lista de tarefas.
- Selecione a guia Propriedades no canto superior direito. A guia Propriedades permite definir os valores de propriedade de um comando.
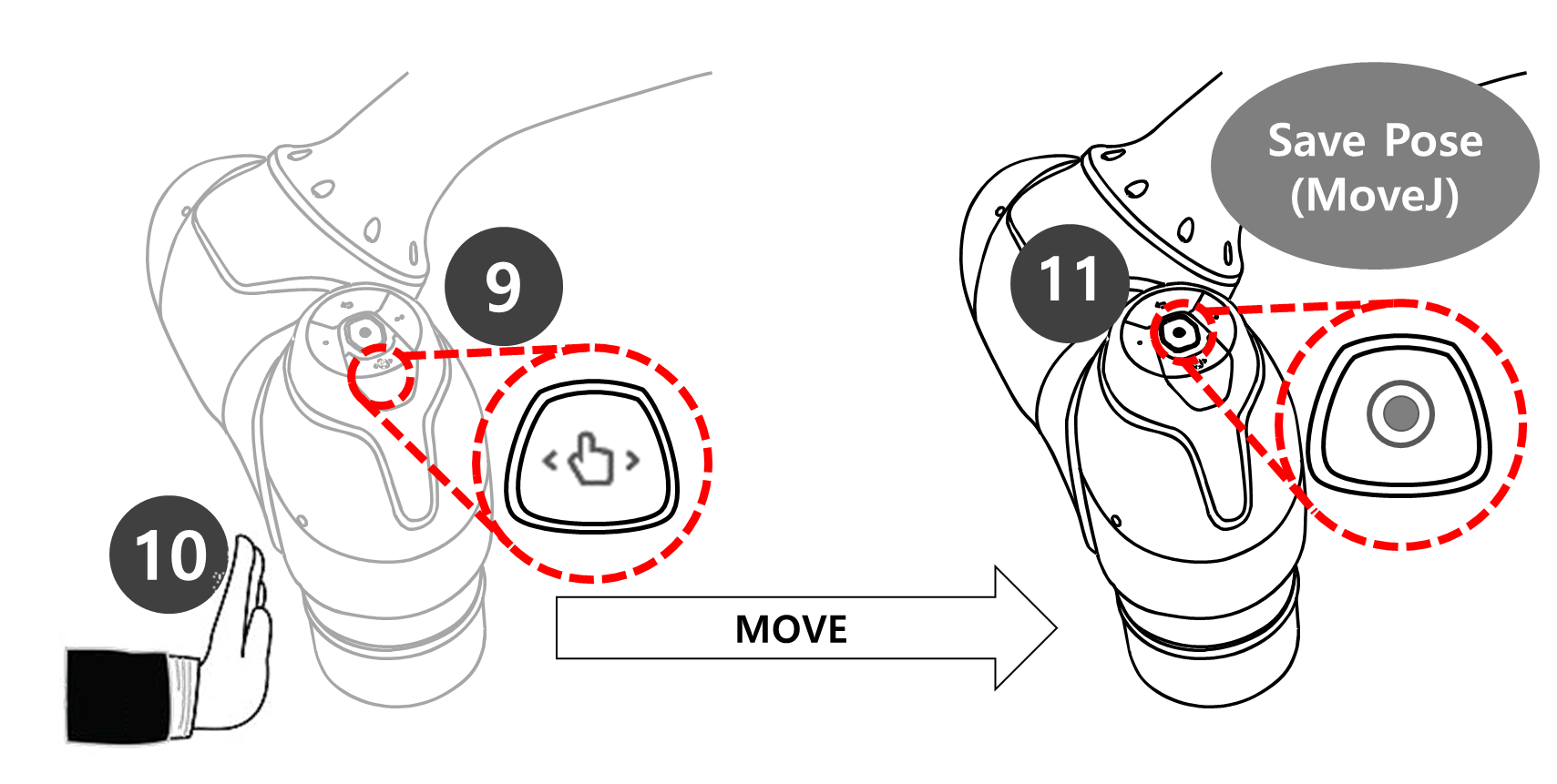
- Prima e mantenha premido o botão de orientação manual no cockpit fixado à parte superior da ponta do robot com uma mão. Os percursos 9 a 11 poupam a posição do MoveJ.
- Para robôs que não podem utilizar o Cockpit, consulte "APRENDER" na parte inferior.
- Empurre o robot com a outra mão para o mover para uma posição segura.
- Solte o botão de orientação da mão e prima o botão Save Pause (Guardar pausa).
- Prima e mantenha premido o botão de orientação manual no cockpit fixado à parte superior da ponta do robot com uma mão. Os percursos 12 a 14 armazenam a posição da MoveL.
- Não é necessário selecionar MoveL na lista de tarefas. Se você pressionar o botão Salvar pose , será movida automaticamente para a próxima linha de tarefa na lista de tarefas.
- Empurre o robot com a outra mão para o mover para uma posição segura.
- Solte o botão de orientação da mão e prima o botão Save Pause (Guardar pausa).
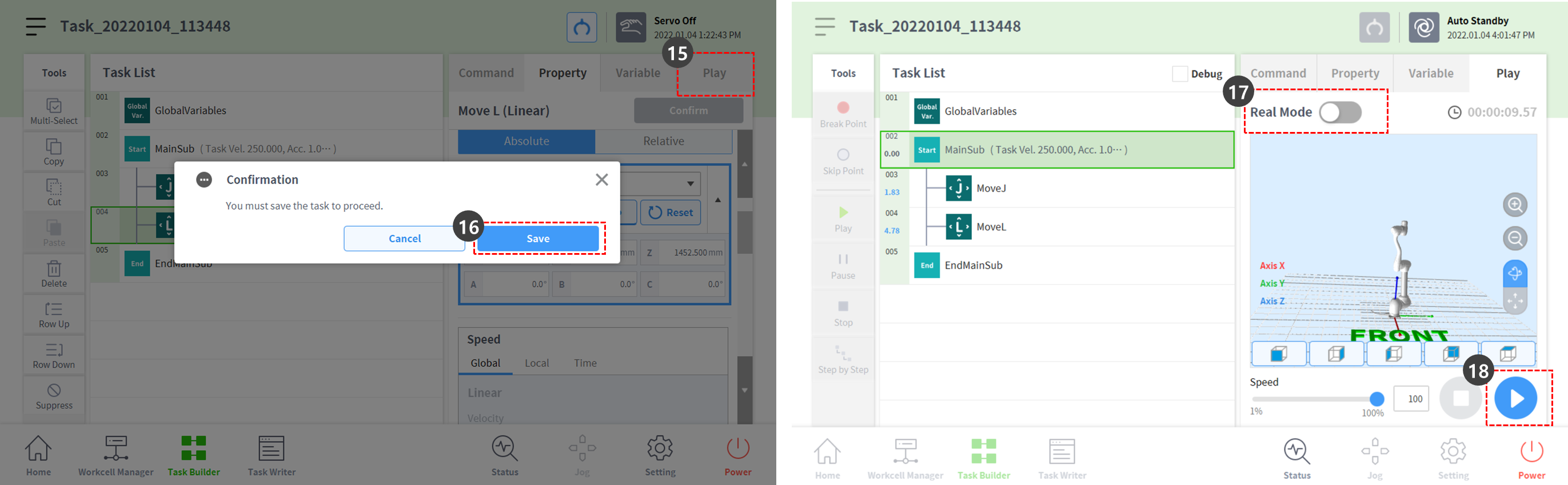
- Pressione a guia Reproduzir para executar a tarefa.
- Uma vez que não guardou a tarefa, é apresentada uma janela pop-up a pedir para guardar a tarefa. Clique em Guardar.
- Defina o botão de alternância do modo Real para desativado (cinzento).
- Se o Modo Real estiver desativado, o robô não se moverá, apenas o simulador na tela moverá o robô virtual.
- Antes de executar uma tarefa, experimente este modo de simulação para testar a tarefa.
- Prima o botão Play (Reproduzir) no canto inferior direito.
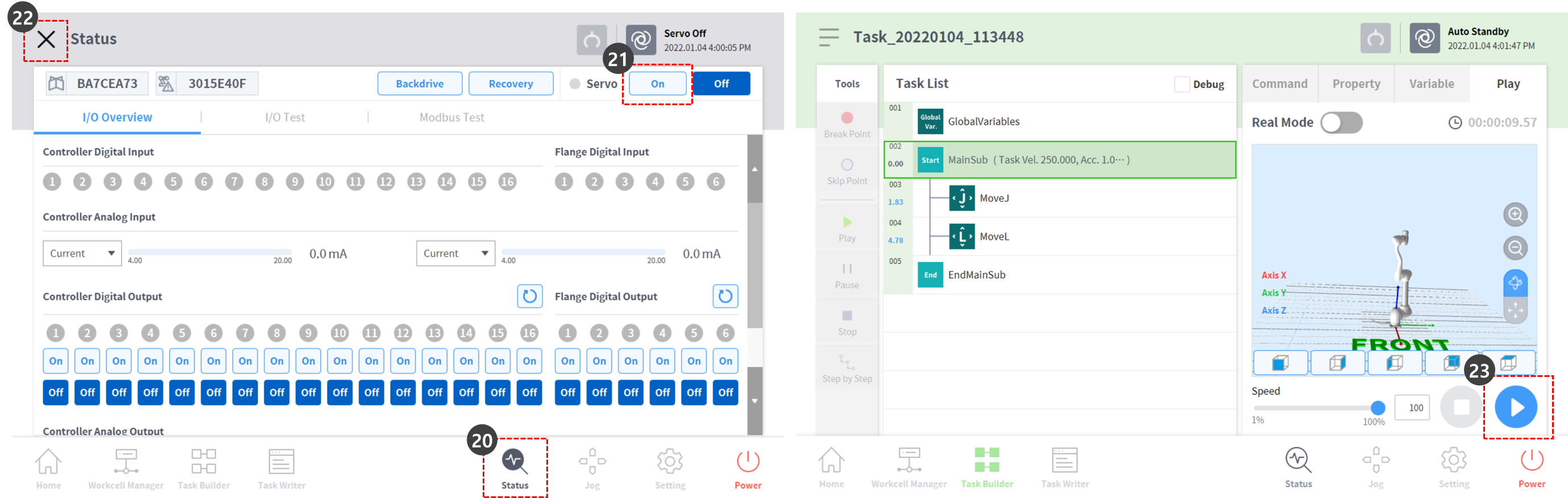
- A mensagem de erro Robot is Not Ready (O robô não está pronto) ocorre. Clique no botão X para fechar a janela pop-up.

- O robot só pode ser movido com o servo-ligado.
- O servo-ligado e o servo-desligado do robô podem ser ligados ou desligados a partir de Estado > Servo.
- O robô deve estar ligado para que esteja pronto. Selecione Estado na barra inferior.
- Pressione o botão Servo On (Ligar Servo).
- Clique no botão X no canto superior esquerdo para fechar a janela Status.
- Prima novamente o botão Play (Reproduzir) no canto inferior direito. O robô se moverá com êxito no simulador.
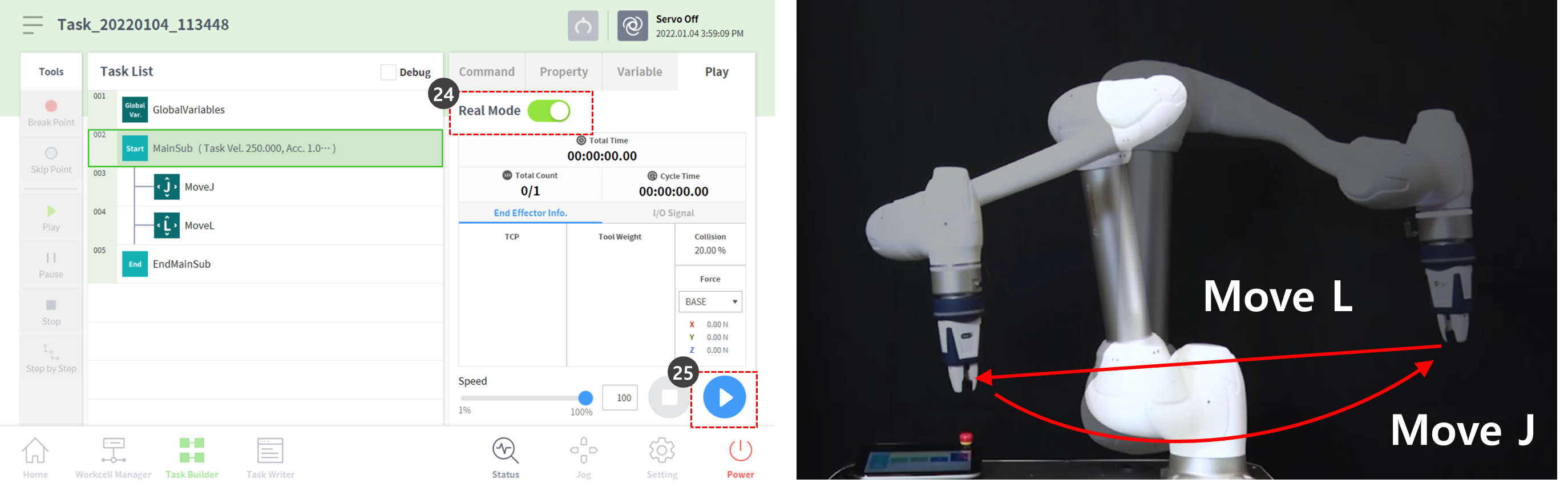
- Defina o botão de alternância do Modo Real para o estado ativado (verde) para ativar o robô real.
- Prima o botão Play (Reproduzir) no canto inferior direito. O robô real se moverá com êxito.
Saber
O botão Save Cock's Pause (Salvar pausa da válvula) funciona da mesma forma que executa as seguintes ações na tela do teicpingente:
- Prima o botão Properties > Get Position (Propriedades > Obter posição) para recuperar a posição atual como informação de localização.
- Pressione o botão Confirmar para salvar as alterações nos atributos do comando.
- Seleccionar o seguinte comando:
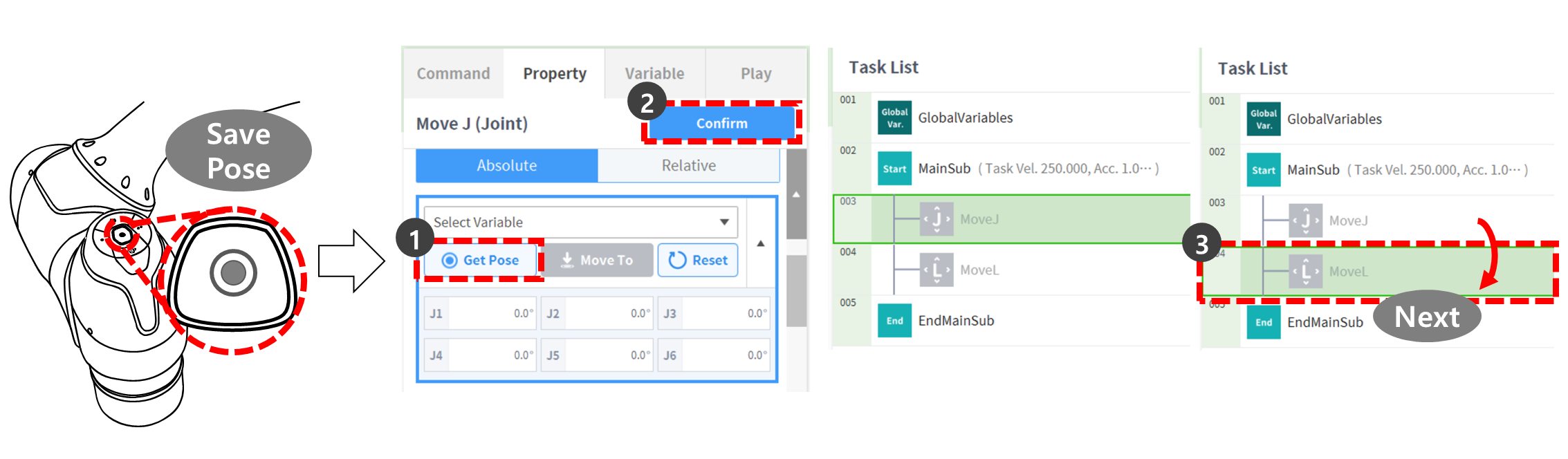
Isto permite-lhe programar rapidamente as tarefas adicionando vários comandos de movimento à lista de tarefas de uma só vez e, em seguida, mantendo premido o botão de orientação da mão do Cockpit enquanto move o robot e prime o botão Save Pause (Guardar pausa).