O robot está colocado na posição de embalagem para facilitar o transporte e a embalagem. O robot deve ser libertado da posição de embalagem antes de poder ser utilizado. Na posição de embalagem, não é possível mudar para o estado servo-ligado devido a uma violação do limite de segurança, uma vez que o robot permanecerá numa posição que exceda o limite do ângulo do robô. O LED do robot ficará vermelho neste ponto.
Saber
Se precisar de embalar um robot enquanto este estiver a ser utilizado, por exemplo, deslocando-o, pode utilizar o movimento da posição da embalagem no modo de embalagem para o alterar para a posição de embalagem.
Para libertar a postura da embalagem:
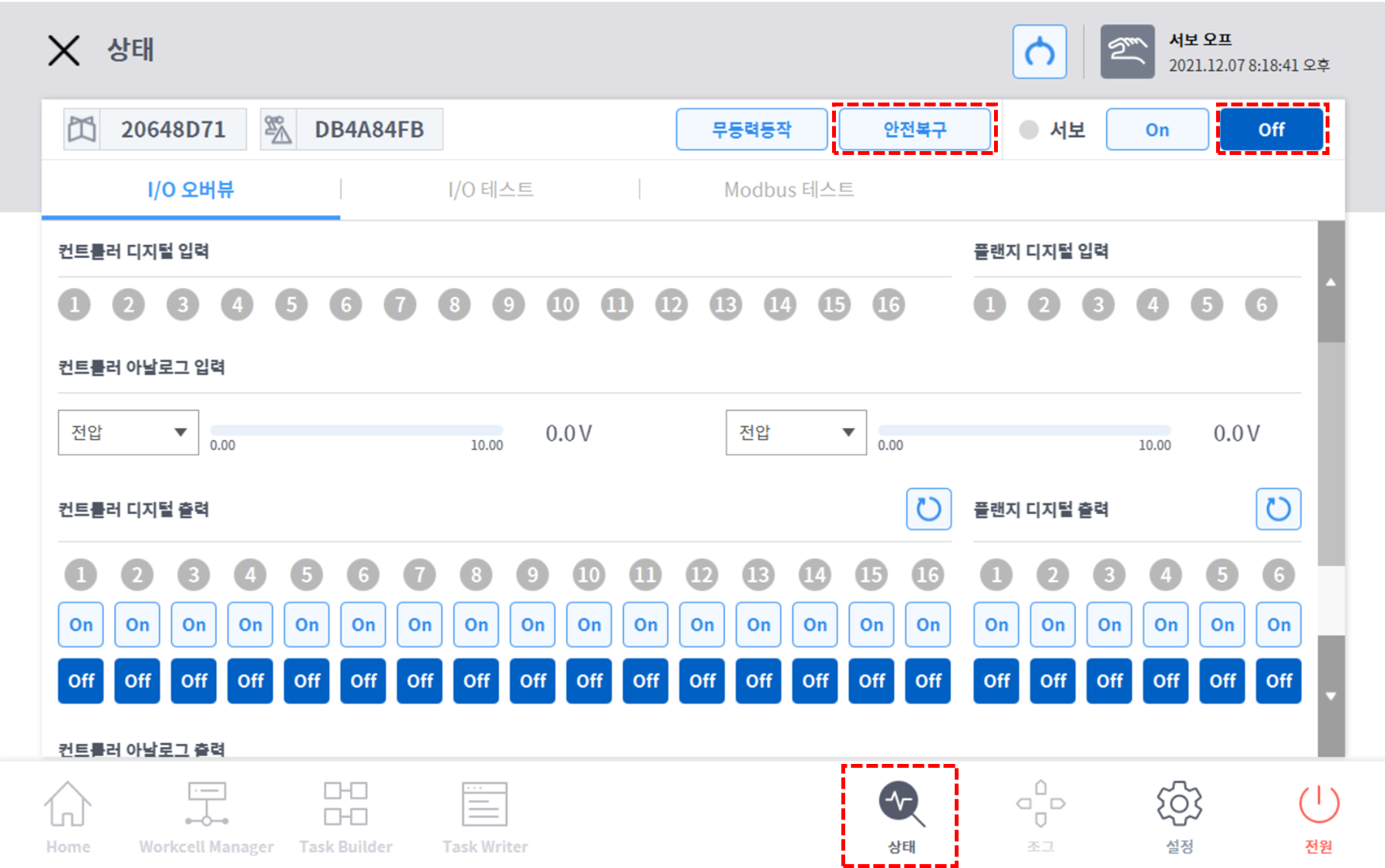
Na tela inicial do pendente de ponto, toque em Status.
Toque no botão Recuperação segura. O botão de recuperação seguraé ativado no estado 'Serbo-off'.
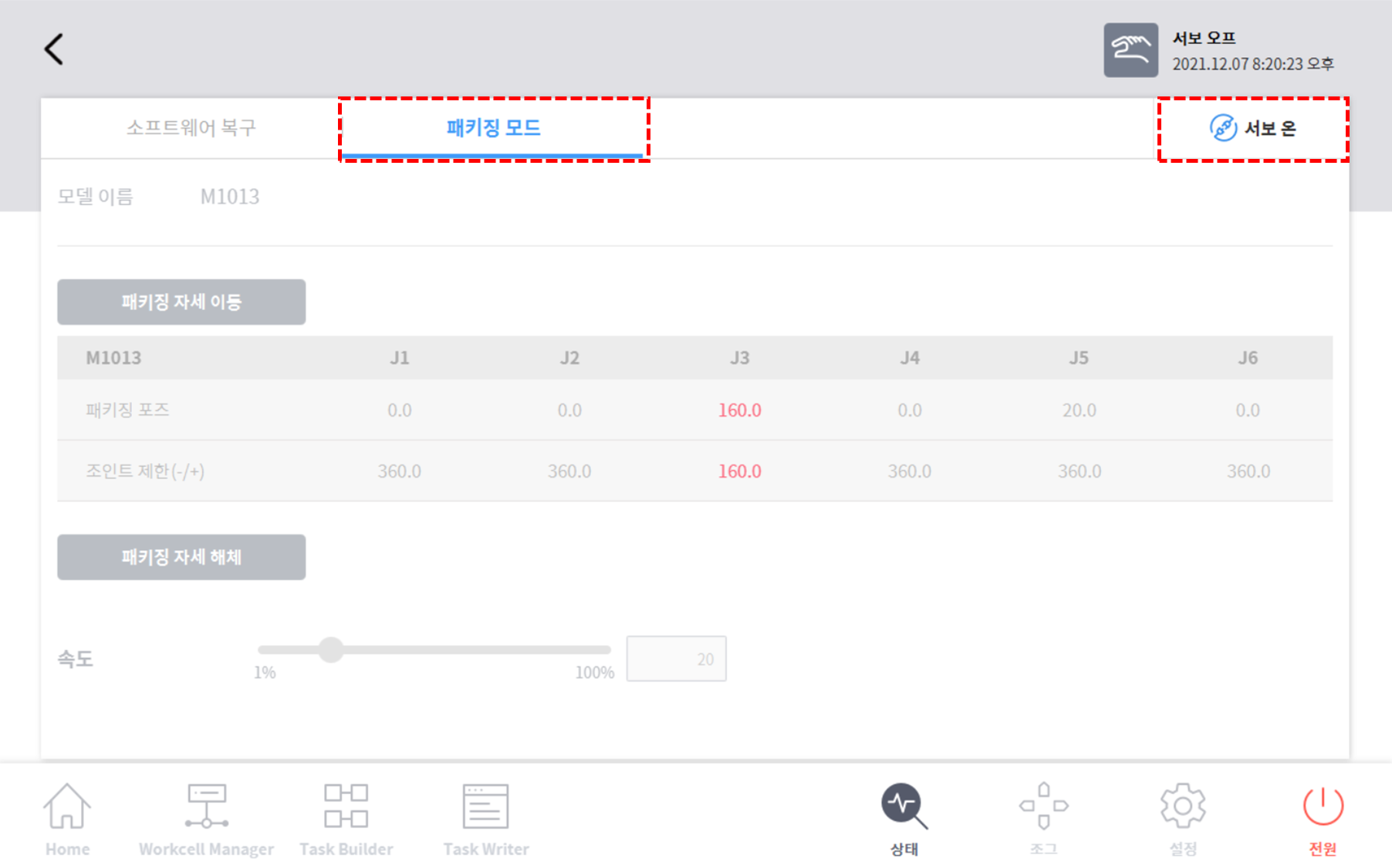
Selecione o separador Packaging Modes (Modos de embalagem).
Toque no botão Servo-on.
O indicador de estado do robotno canto superior direito do ecrã Teach-Pendant muda para "Safe-Off" (Desligado) e "Safe-Off" (Desligado). No ecrã do separador Packaging Mode (Modo de embalagem), toque no botão de alternância Packaging Mode (Modo de embalagem).
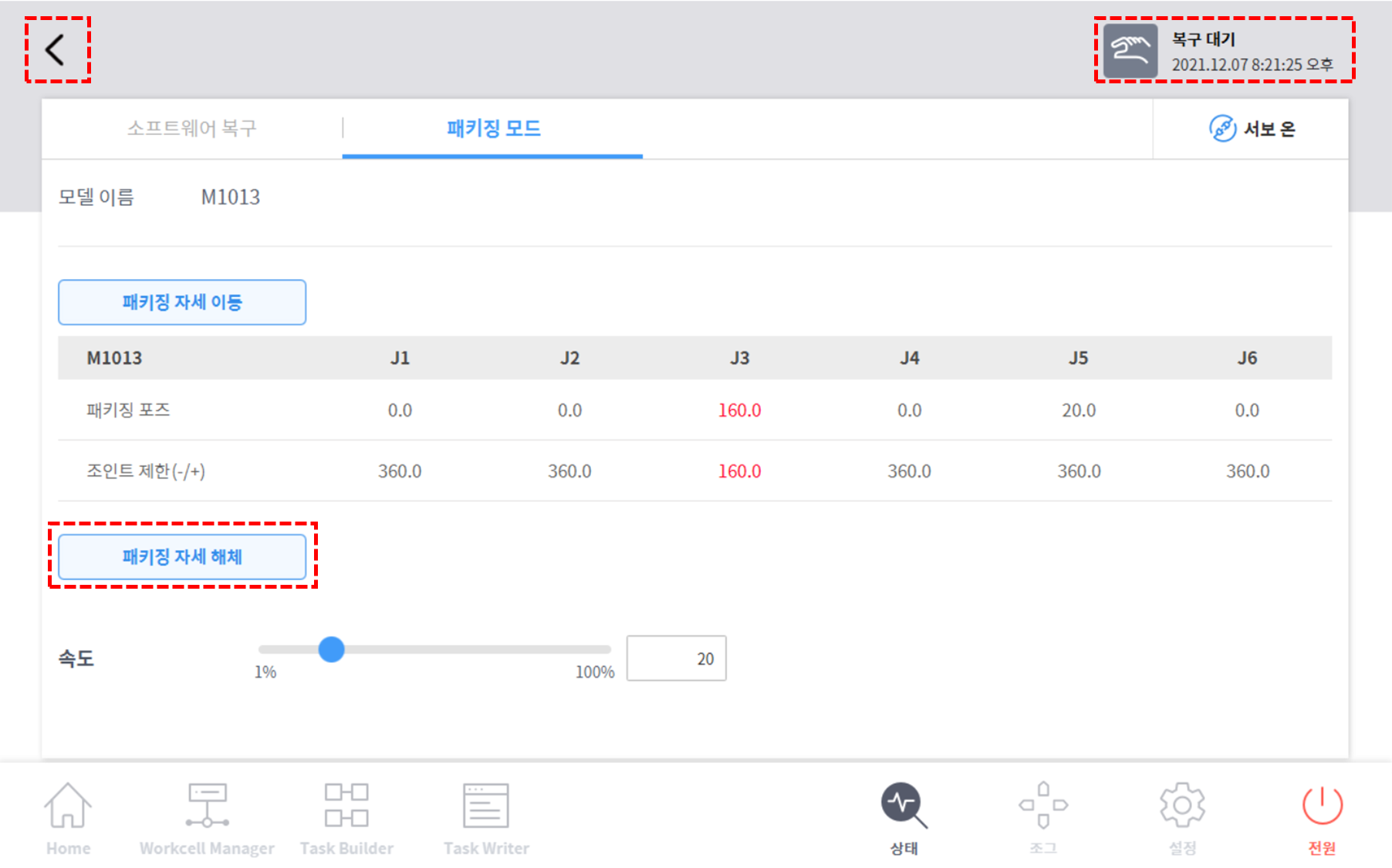
Mantenha premido o botão de libertação da embalagem. O robot limpa o modo de embalagem e desloca-se para a posição inicial. Quando a posição inicial estiver concluída, o robot deixa de se mover.
Quando o robot se tiver deslocado para a posição inicial, toque no botão no canto superior esquerdo do ecrã.
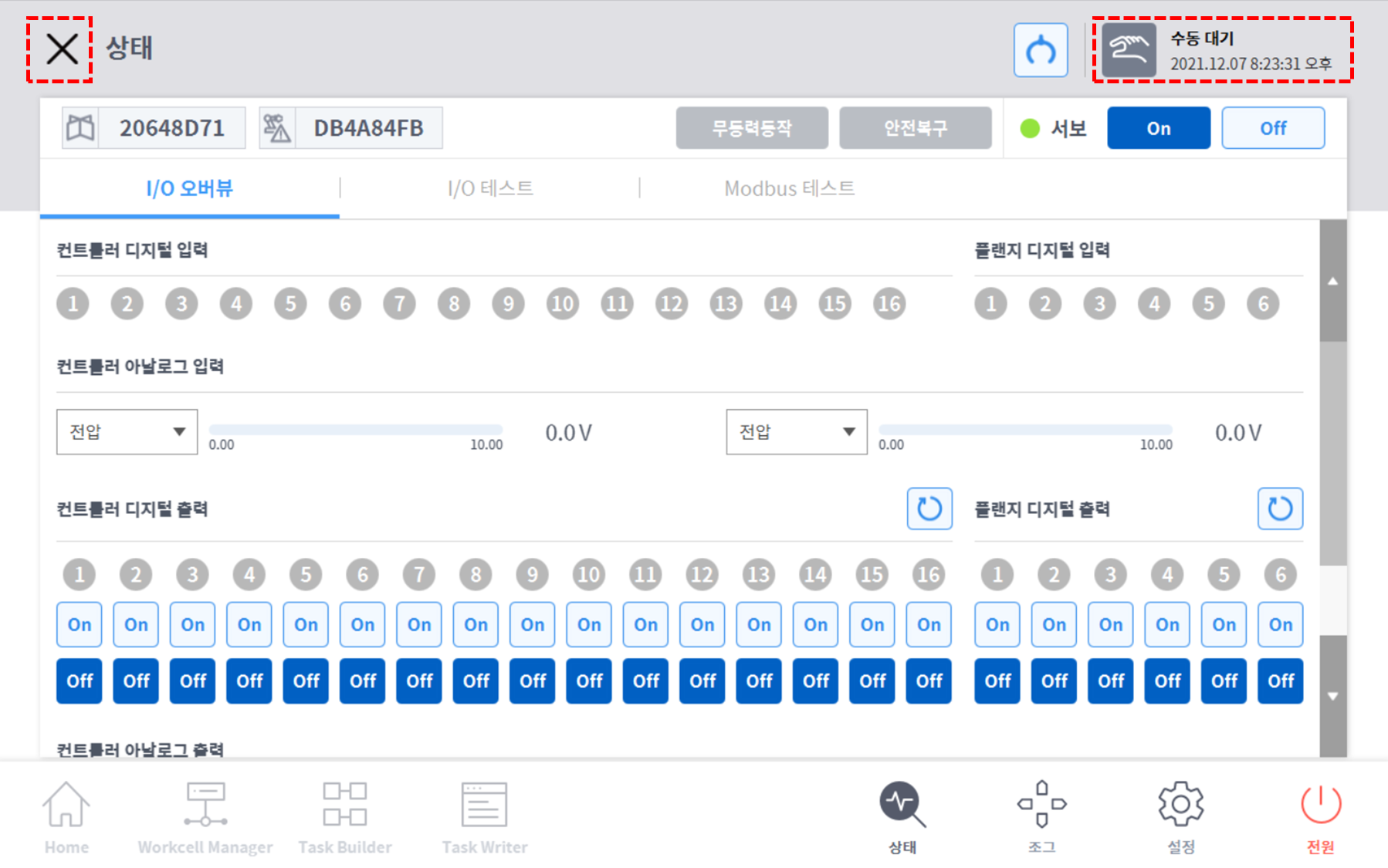
O indicador de status do robôno canto superior direito da tela Teach-Pendant alterna de "repouso" para "espera manual". O robô está agora num estado que lhe permite ser operado de acordo com as ações do utilizador. A partir do ecrã de estado, toque no botão Close (Fechar) para fechar o ecrã de estado.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.