Inicializando o sistema
Quando ligado, o sistema começa a arrancar. Quando a inicialização estiver concluída, o programa operacional do sistema será exibidona tela do pendente de costura. Ecrãs de programaPara obter uma descrição completa do programa de funcionamento do sistema, consulte.
No caso da plataforma DART (para Windows),
- Execute a plataforma DART instalada no desktop ou laptop.
- Aguarde cerca de 5 minutos para que o controlador do robô conclua a inicialização.
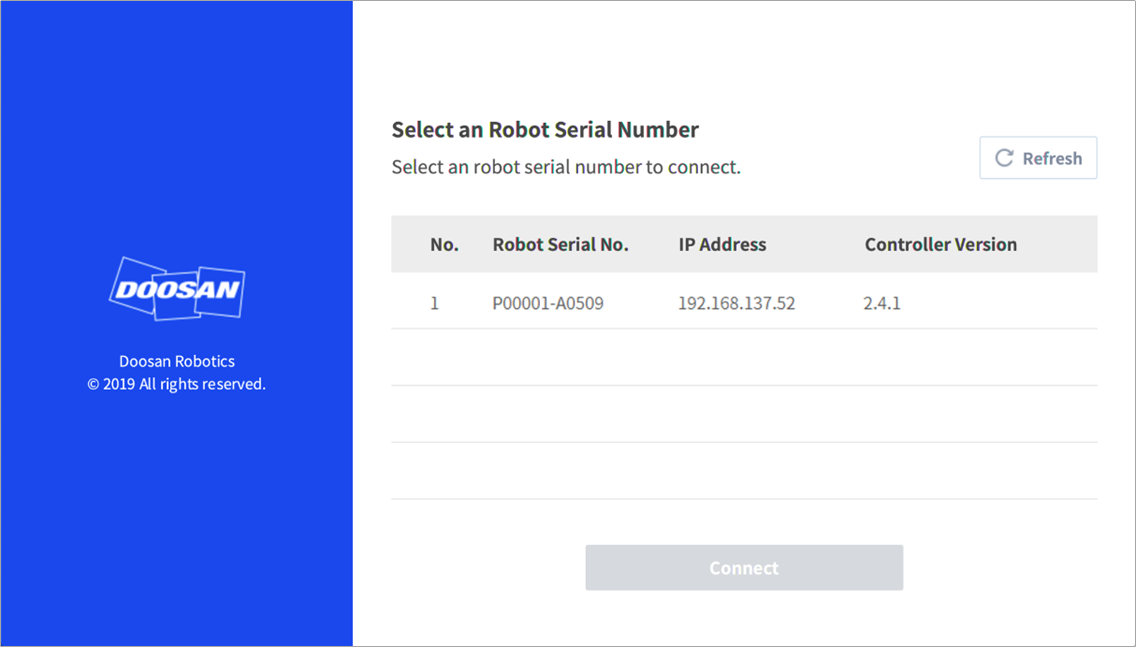
- Quando o IP for pesquisado, verifique o número de série do conectado à rede.
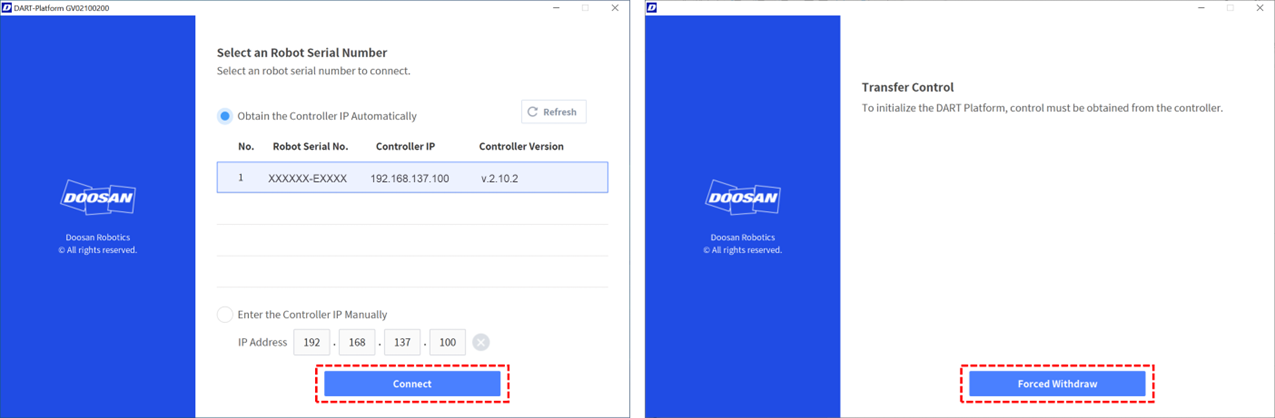
- Selecione o robô que deseja conectar e clique no botão 'Conectar'.
- Pressione o botão Force Recall para transferir o controle.
Saber
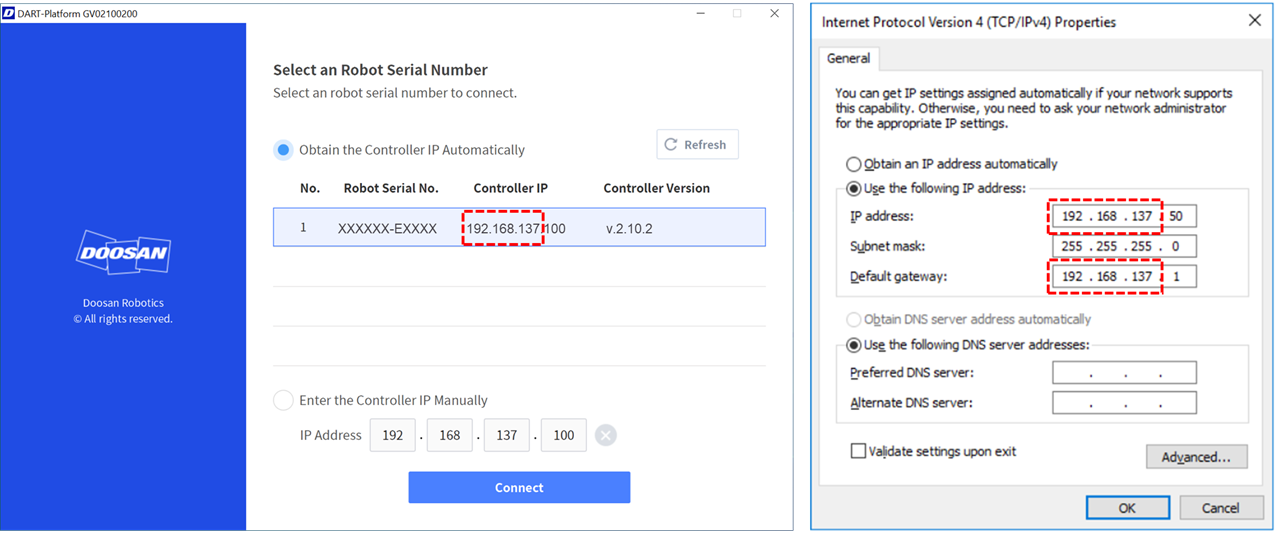
Se não houver conexão entre o controlador e a plataforma DART, altere a banda de classe C do endereço IP e o gateway padrão do desktop ou laptop com a plataforma DART instalada para a banda de classe C do endereço IP dos controladores e tente novamente.
Se o IP não for pesquisado, selecione 'Enter the Controller IP Manually' e prossiga com a conexão. O endereço IP padrão do controlador é definido como 192.168.137.100.
Se a Retirada Forçada do controle continuar a falhar, verifique o seguinte:
Feche o programa e reinicie.
Certifique-se de que os botões de parada de emergência não estejam pressionados.
Se um ou mais pares de entradas digitais do controlador forem designados para parada de emergência/parada de emergência remota/sinal STO (ativo baixo) na configuração de E/S de segurança, certifique-se de que todos os sinais designados estejam desativados ( Alto).
Verifique se o controlador concluiu a inicialização.
Verifique o status do robô. No caso de controle remoto, recuperação ou backdrive, a execução da plataforma DART pode falhar.
Saber
- Servo ligado: Para mover a posição do robô, a energia deve ser aplicada à junta do robô para permitir que o robô se ligue, o que muda o robô para o modo de espera. O que é o Servo-ons? Consulte para obter mais informaçõessobre o servo-ligado.
- Definir data e hora: A data e a hora mostradasnas mensagens do Teach-Pendant e de log armazenadas no robô são exibidas com base na data e na hora definidas no programa operacional do sistema, de modo que a data e a hora devem ser definidas após a primeira inicialização. Consulte para obter informações sobre como definir a data e a horaDefinir a data e a hora.
- A plataforma DART permite o controle robótico no mesmo ambienteque o Teach-Pendant.
- Para a Plataforma DART, quando a bagageira estiver concluída, será apresentado um ecrã com os robôs ligados à rede , onde irá identificar os números de série dos robôs que pretende ligar e, em seguida, ligá-los.
- É apresentada uma janela pop-up de avisoquando existe uma diferença de versão do software entre o robô, o controlador e o módulo Smart Vision (se a Smart Vision estiver ligada).