
Configurações da ferramenta
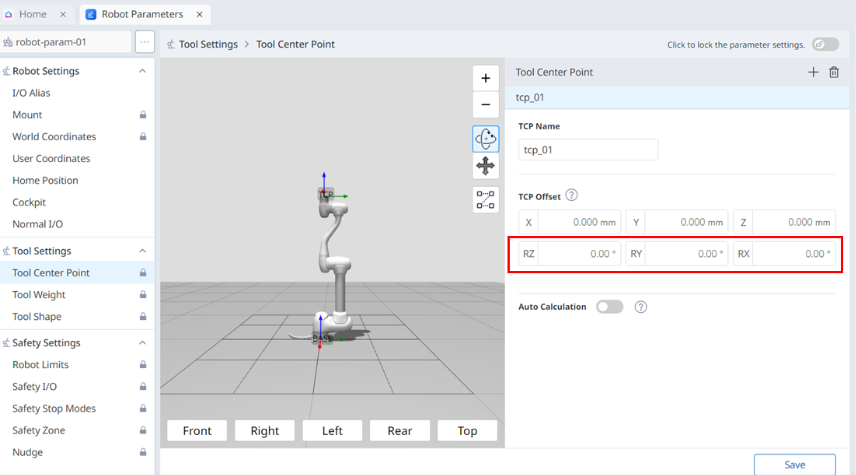
Ponto central da ferramenta
Ao configurar o ponto central da ferramenta (TCP), a posição e o ângulo de rotação com base nas coordenadas do flange também devem ser definidos. ime, a distância do ponto inicial padrão da coordenada do flange até o ponto do centro da ferramenta (TCP) nas direções X, Y e Z não pode ser definida como maior que 10000 mm. Além disso, observe que Controle de força, Controle de conformidade e Fixação direta do ponto de ensino só estão disponíveis quando os comprimentos convertidos de X, Y e Z (![]() ) são 300 mm ou menores.
) são 300 mm ou menores.
Se o ponto central da ferramenta (TCP) estiver configurado usando Cálculo automático, o cálculo será feito com base apenas nas posições X, Y e Z, portanto, será necessário inserir o ângulo de rotação. O ângulo de rotação pode ser definido com RZ, RY e RX e baseado no método de rotação "Euler Z-Y-Z".
As definições do eixo de coordenadas expresso com x, y, z e eixo de coordenadas expresso com X, Y, Z são as seguintes:
Eixo de coordenadas da "coordenada do flange" (x, y, z): A direção do eixo de coordenadas da "coordenada do flange" definida na extremidade do flange é idêntica à coordenada do robô quando o ângulo da junta do robô é (0,0,0,0,0,0).
Eixo de coordenadas da "coordenada TCP" (X, Y, Z): Isso é definido na extremidade ou no ponto de trabalho da ferramenta instalada na extremidade do flange. Neste momento, o ângulo de rotação da "coordenada TCP" é definido com base na "coordenada do flange" na ordem de 1) a 3) do seguinte:
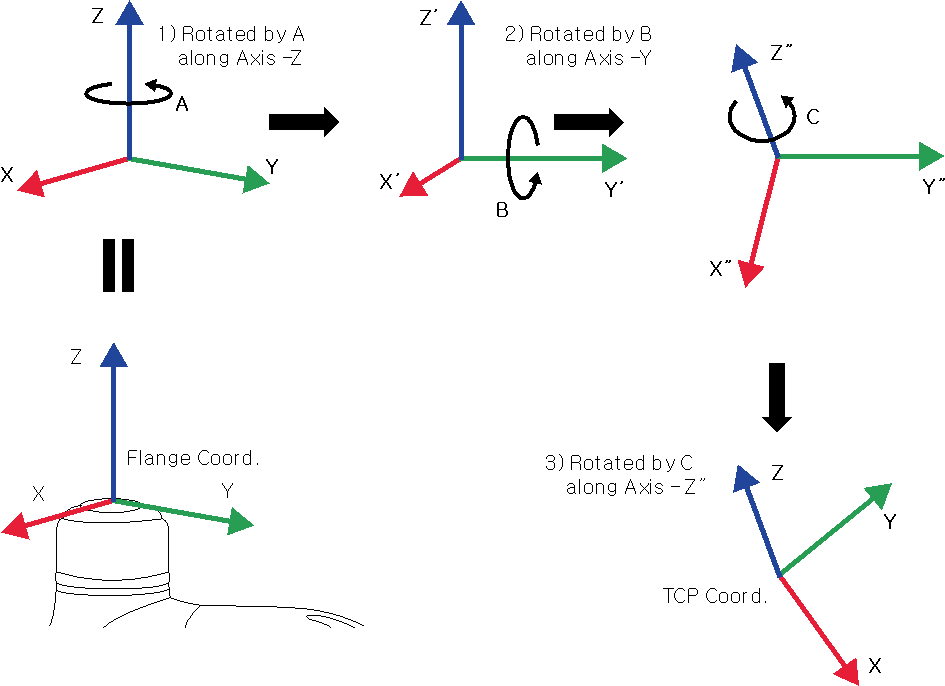
Gire A graus ao longo do eixo z da coordenada do flange.
Gire graus B ao longo do eixo y' da coordenada girada de acordo com 1).
Gire C graus ao longo do eixo z'' da coordenada girada de acordo com 2).
Aqui estão alguns exemplos de configuração do TCP de acordo com o método descrito acima:
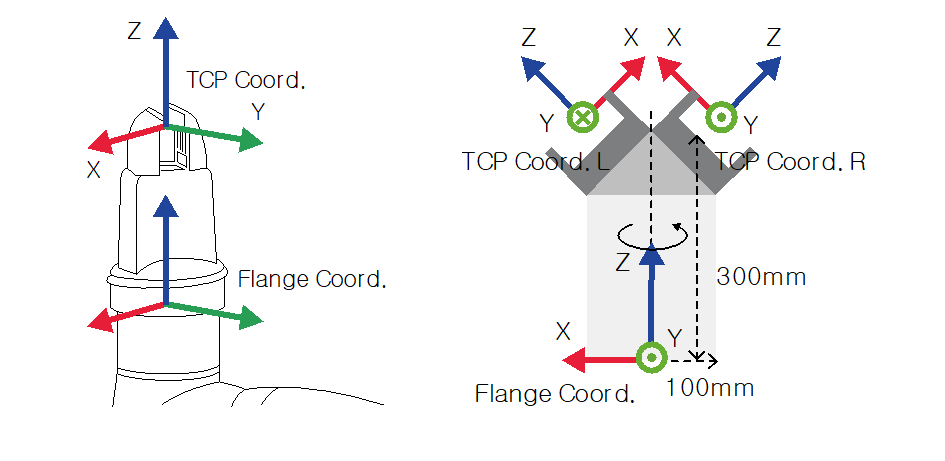
[X, Y, Z, A, B, C]: [0, 0, 100, 0, 0, 0]: Pinça geral com apenas um deslocamento de direção Z (TCP Coord)
[X, Y, Z, A, B, C]: [100, 0, 300, 180, -45, 0]: Pinça esquerda com ângulo de 45 graus (TCP Coord. L)
[X, Y, Z, A, B, C]: [-100, 0, 300, 0, -45, 0]: Pinça direita com ângulo de 45 graus (TCP Coord. R)
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Botão de alternância Bloquear | Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
| 2 | Simulação 3D | É aqui que você pode simular o Ponto Central da Ferramenta configurado. |
| 3 | Adicionando | Este botão permite adicionar TCP. |
| 4 | Excluindo | Este botão permite excluir o TCP selecionado. |
| 5 | Salvar | Este botão permite que os valores de configuração sejam salvos. |
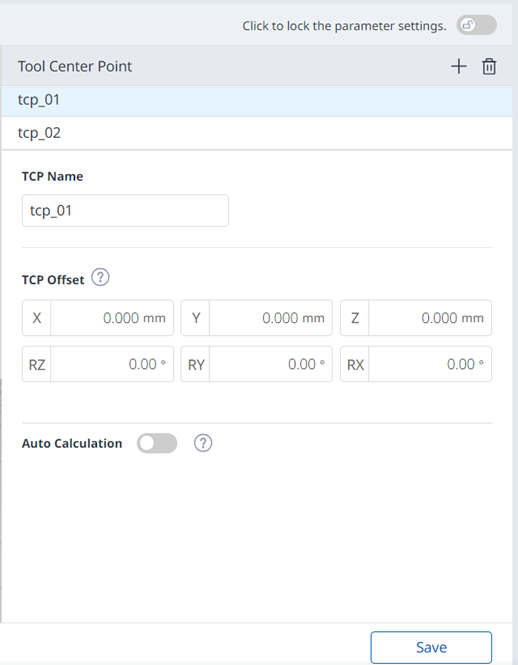
Quando as configurações estão bloqueadas, a tela abaixo é exibida.
Neste momento, o TCP selecionado é visto em azul, como mostrado abaixo.
Peso da ferramenta
Você pode definir o peso da ferramenta montada no flange adicionando um Peso da ferramenta. O peso da ferramenta pode ser definido selecionando Parâmetros do robô > Configurações da ferramenta > Peso da ferramenta.
O peso da ferramenta pode ser medido usando a função de medição automática.
Recomenda-se adicionar o peso da ferramenta para cada ferramenta com uma peça de trabalho. Se o peso da peça de trabalho for muito pesado, o robô poderá reconhecer o peso da peça de trabalho como força externa. É porque o robô determina essa força externa como uma colisão e para.
Ao criar uma tarefa, altere o peso de acordo com o processo para alterar o peso da ferramenta. Por exemplo, é possível configurar uma tarefa para selecionar o peso da ferramenta padrão antes de pegar uma peça de trabalho e selecionar o peso da ferramenta com a peça de trabalho depois de pegar uma peça de trabalho.
O item de peso da ferramenta ativado pode ser definido como o peso da ferramenta padrão pressionando o ícone de ferramenta Definir (![]() ) na parte superior do pendente de instrução.
) na parte superior do pendente de instrução.
O conjunto da configuração da ferramenta é o mesmo que o conjunto de outros comandos. O comando SET pode ser usado ao alterar o Peso da ferramenta enquanto uma tarefa está sendo executada. Para obter mais informações, consulte Módulo Editor de Tarefas .
Observação
Até cinquenta pesos de ferramenta diferentes podem ser registrados.
No caso da série M, a aceleração ajusta automaticamente a função quando o peso máximo da ferramenta excede o peso máximo da ferramenta.
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Botão de alternância Bloquear | Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
| 2 | Adicionando | Este botão permite adicionar um novo Peso da ferramenta. |
| 3 | Excluindo | Este botão permite excluir um Peso de ferramenta. |
| 4 | Lista de peso da ferramenta | Uma lista dos pesos de ferramenta configurados. |
| 5 | Nome do peso da ferramenta | É aqui que você pode inserir um nome para o Peso da ferramenta. |
| 6 | Medição automática do movimento | Este botão permite executar a medição automática. |
| 7 | Medição automática | Este botão permite selecionar uma opção e executar uma medição automática para ela. |
| 8 | Seleção de movimento | Você pode selecionar o Movimento desejado nas opções. |
| 9 | Seleção do uso de peso | Você pode escolher se deseja usar o peso. Esta caixa de seleção está desativada para a Série E ou Série A sem sensores FPT. |
| 10 | Entrada de peso | É aqui que você pode inserir o peso desejado. |
| 11 | Seleção do uso do Centro de Gravidade CX | O uso do centro de gravidade CX pode ser selecionado. |
| 12 | Entrada CX | CX pode ser inserido. |
| 13 | Seleção do uso do Centro de Gravidade CY | O uso do centro de gravidade CY pode ser selecionado. |
| 14 | Entrada CY | CY pode ser inserido. |
| 15 | Seleção do uso do Centro de Gravidade CZ | O uso do centro de gravidade CZ pode ser selecionado. |
| 16 | Entrada CZ | CZ pode ser inserido. |
| 17 | Se usar inércia | Esta caixa de seleção permite escolher se deseja usar a inércia. |
| 18 | Entrada lxx | Uma entrada lxx para inércia pode ser inserida. |
| 19 | Entrada Lyy | Uma entrada de lise para inércia pode ser inserida. |
| 20 | Entrada LZZ | Uma entrada lzz para inércia pode ser inserida. |
| 21 | Entrada lxy | Uma entrada lxy para inércia pode ser inserida. |
| 22 | Entrada Lyz | Uma entrada de lise para inércia pode ser inserida. |
| 23 | Entrada lzx | Uma entrada lzx para inércia pode ser inserida. |
| 24 | Salvar | Este botão permite salvar os valores de configuração. |
Forma da ferramenta
A forma da ferramenta instalada no flange pode ser definida adicionando uma forma de ferramenta.
A Forma da ferramenta pode ser definida no módulo Parâmetros do robô > Configurações da ferramenta > Forma da ferramenta. Para obter mais informações, consulte Forma da ferramenta.
O robô determina o status de violação do limite de espaço com base no TCP (Tool Center Point) da extremidade do robô e do corpo do robô. Se o robô real tiver um formato de ferramenta maior que o TCP definido, um formato de ferramenta deve ser adicionado para proteger a peça de trabalho e a ferramenta.
Tome cuidado, pois a zona que o robô pode manobrar diminuirá se o formato da ferramenta for muito grande.
O item de forma de ferramenta só estará disponível depois de registrado (confirmado) e o interruptor de alternância estiver ativado. O item de forma de ferramenta ativado pode ser definido como a forma de ferramenta padrão pressionando o ícone de ferramenta Definir (![]() ) na parte superior do pendente de instrução.
) na parte superior do pendente de instrução.
O conjunto da configuração da ferramenta é o mesmo que o conjunto de outros comandos. O comando SET pode ser usado ao alterar a forma da ferramenta enquanto uma tarefa está sendo executada. Para obter mais informações, consulte Módulo Editor de Tarefas.
Observação
Até cinquenta formas de ferramenta diferentes podem ser registradas.
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Botão de alternância Bloquear | Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
| 2 | Simulação 3D | É aqui que você pode simular em 3D o resultado da Forma de ferramenta configurada. |
| 3 | Nome da forma da ferramenta | O nome da ferramenta configurada. |
| 4 | Forma da ferramenta | A forma da ferramenta configurada. |
| 5 | Editar forma da ferramenta | Este botão permite editar a Forma da ferramenta configurada. |
| 6 | Excluindo Forma de ferramenta | Este botão permite excluir a Forma de ferramenta selecionada. |
| 7 | Adicionar Forma de ferramenta | Uma forma de ferramenta pode ser adicionada. |
| 8 | Aplicando | Este botão permite aplicar a Forma da ferramenta após configurá-la. |
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Forma da ferramenta | Isso indica que esse painel é um pop-up Forma de ferramenta. |
| 2 | Inserir um Nome | Este é um campo onde o nome da Forma de ferramenta pode ser inserido. |
| 3 | Mensagem de Cuidado | Uma nota de cuidado ao configurar |
| 4 | Adicionar novo cuboid | Este botão permite que você adicione um cuboide. |
| 5 | Adicionar nova esfera | Este botão permite adicionar uma esfera. |
| 6 | Adicionar nova cápsula | Este botão permite adicionar uma cápsula. |
| 7 | Cancelar | Este botão permite cancelar a configuração. |
| 8 | Confirme | Este botão permite confirmar a configuração. |
Uma vez que o cubo/esfera/cápsula é adicionado, a exposição é vista como abaixo.