Visão geral das propriedades de movimento do robô do Editor de tarefas
É a tela de propriedades dos comandos Movimentos padrão, MoveJ e MoveL. Outros movimentos também têm propriedades semelhantes.
Se o movimento for criado com as configurações mínimas, somente as informações de pose (5 na figura abaixo) precisarão ser inseridas.
Nome | Descrição | |
|---|---|---|
1 | Anotação | Descrição ou anotação do comando que pode ser encontrada na janela de tarefas |
2 | Coordenadas |
|
3 | Selecione o tipo de movimento |
|
4 | Selecione Variáveis | As informações de posição registradas como variáveis podem ser selecionadas |
5 | Informações de posição | As informações de posição são inseridas
|
6 | Configuração de velocidade |
|
7 | Fixação de velocidade TCP | Na propriedade da MainSub, Quando o recurso Fixação de velocidade TCP está ativado, se a velocidade linear da tarefa exceder o limite de velocidade global nos comandos Mover J e Mover JX, a velocidade TCP global é aplicada automaticamente. No entanto, a velocidade de segurança e os limites de velocidade locais sempre têm precedência sobre o limite de velocidade global. |
8 | Modo de operação |
|
9 | Modo de mesclagem | A opção usada para determinar se o movimento anterior deve ser ignorado ou substituído de acordo com o modo de mesclagem do movimento seguinte quando o raio é definido como uma opção do movimento anterior |
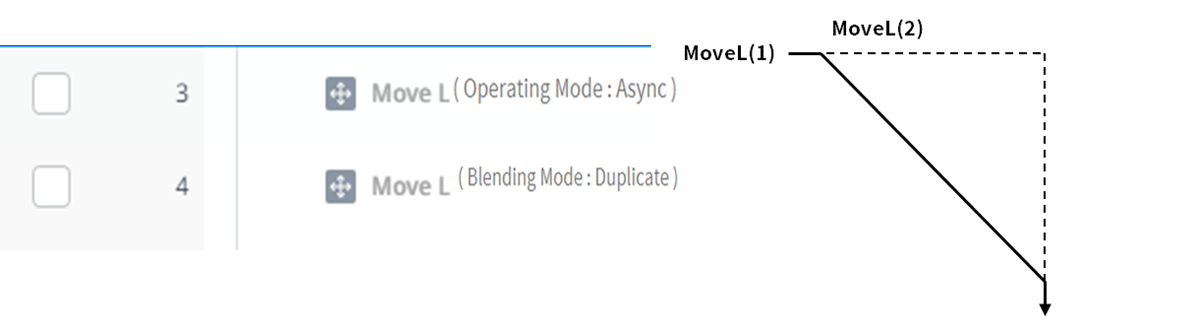
Modo de operação
Sincronizar
Você pode mover para o próximo comando com Sincronizar quando o comando em andamento for concluído. Ele é definido como padrão e usado em situações gerais.
Assíncrono
Async inicia o próximo comando simultaneamente quando o comando de movimento começa. Ele é usado para conetar suavemente diferentes movimentos e também é usado quando a saída do sinal é ligada / desligada simultaneamente quando o movimento começa.
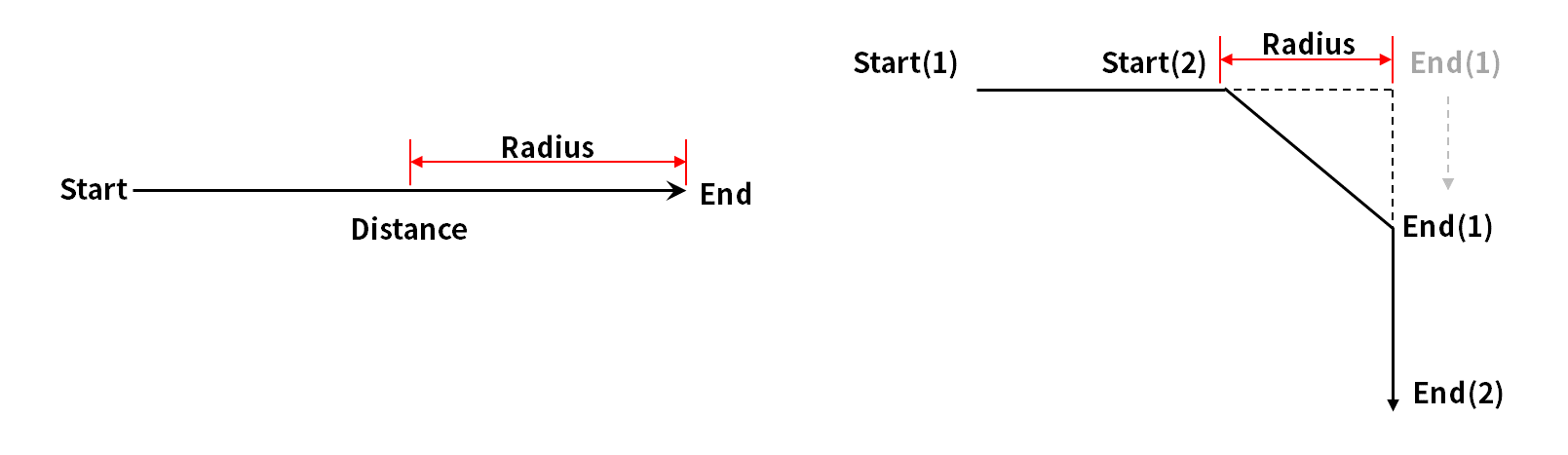
Raio
A opção Raio ativa a função assíncrona na seção Raio antes que o comando de movimento atinja seu ponto-alvo. Com essa opção, é possível se conectar suavemente ao próximo comando de movimento sem interromper o comando de movimento atual. O raio é definido como 0 mm como padrão.
Cuidado
A opção Raio tem as seguintes características e limites:
A função RADIUS só pode ser usada no modo de sincronização.
Condições e cálculos podem ser realizados na seção assíncrona dentro do raio.
O raio não pode exceder 1/2 da distância total entre o local atual e o local de destino antes que o movimento seja executado.
ex. Se a distância de movimento for de 100 mm, o raio máximo disponível será de 50 mm.
Os comandos de movimento que não podem aplicar Mesclagem entre movimentos são os seguintes: A mesclagem já está aplicada nesses comandos, portanto, aplicar raio a esses comandos e executá-los causa erros. A utilização de comandos, como WaitMotion e StopMotion, pode ajudar a evitar erros.
MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
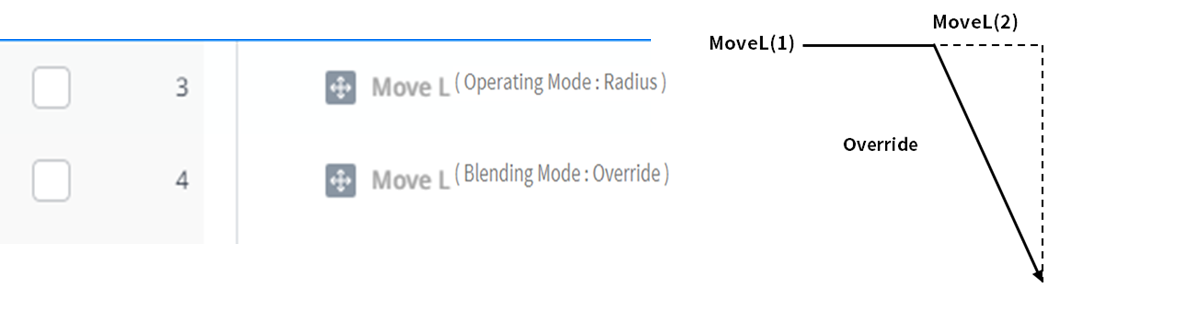
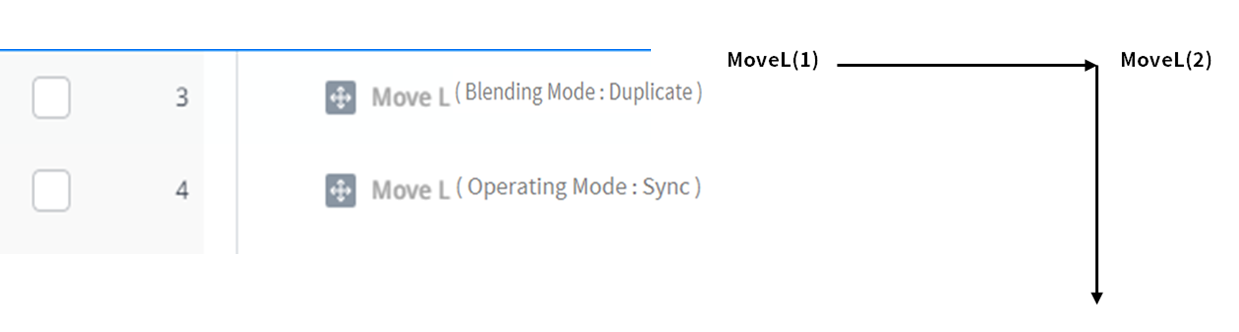
Modo de mesclagem
É a opção usada para determinar se o movimento precedente deve ser ignorado ou substituído de acordo com o modo de mesclagem do movimento seguinte quando o raio é definido como uma opção do movimento anterior.
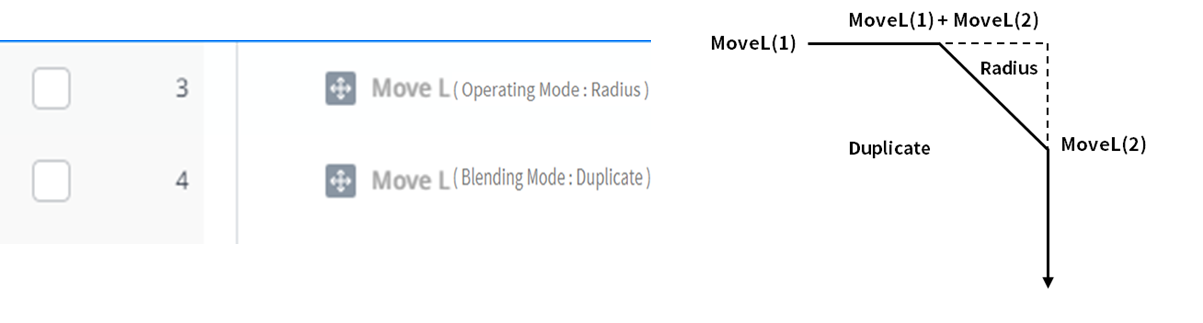
Duplicar
Duplicar é um modo que mantém o movimento anterior para permitir que o movimento seguinte se sobreponha ao movimento anterior.
Substituir
Substituir é um modo no qual o movimento seguinte é executado ignorando e substituindo o movimento anterior.