
Módulo de Controle Remoto
O módulo de controle remoto permite que o controle remoto seja executado para tarefas que você já criou.
Na Autoridade do operador, você pode iniciar o Modo de controle remoto, mas não pode modificar as configurações de E/S. As configurações de E/S só podem ser alteradas com autoridade de Administrador.
Menu
Itens | Descrição | |
|---|---|---|
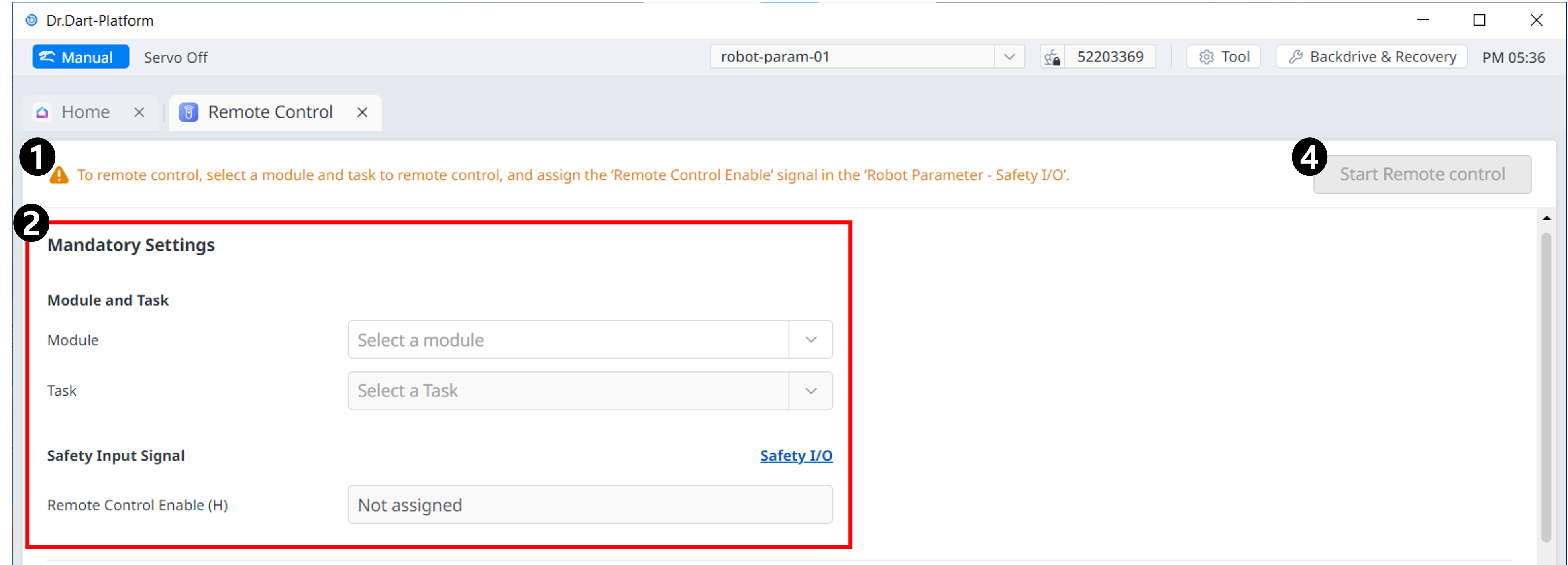
| 1 | Aviso | Isso mostrará as precauções necessárias ao usar o módulo. |
| 2 | Configurações obrigatórias | Esta é uma configuração obrigatória para o controle remoto. Você pode definir módulos e tarefas e definir sinais de entrada seguros. |
| 3 | Configurações avançadas | Isso permite configurações avançadas para controle remoto. Você pode definir cada porta da tarefa para iniciar/pausar/parar/retomar/servo ativada. Se o controle remoto estiver configurado para ser executado automaticamente após a reinicialização, ele será executado assim que o Dart-Platform for reinicializado. |
| 4 | Inicie o controle remoto | Este botão permite iniciar o controle remoto após todas as configurações terem sido concluídas. |
Itens de configuração
Configurações obrigatórias
Em Configurações obrigatórias, você deve configurar os itens essenciais para executar o controle remoto.
Essas configurações devem ser concluídas para ativar a função Controle remoto.
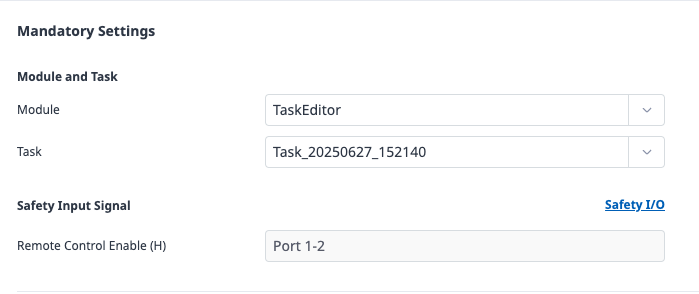
Selecione Módulo e Tarefa
Selecione o módulo que suporta o controle remoto e especifique a tarefa a ser controlada dentro desse módulo.
Sinal de entrada de segurança
Configure o sinal de ativação do controle remoto.
Você pode especificar isso na guia E/S de segurança do módulo de parâmetros do Robô.
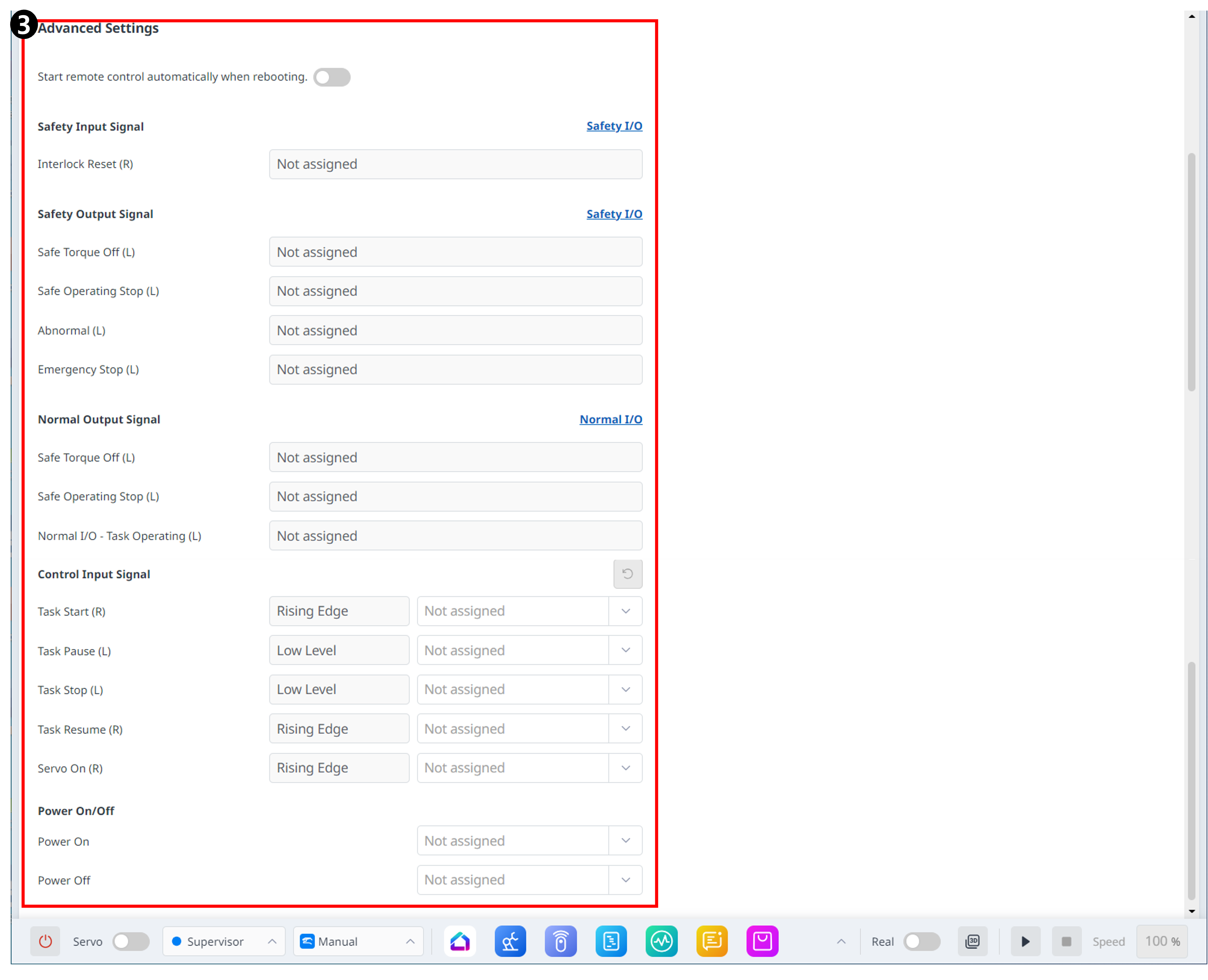
Configurações avançadas
Em Configurações avançadas, você também pode configurar recursos opcionais necessários para a operação do controle remoto.
Essas configurações são opcionais e, se não estiverem configuradas, a função básica do controle remoto ainda estará disponível.
Inicie o controle remoto automaticamente ao reinicializar

Quando o botão de alternância estiver definido como LIGADO, o sistema entrará automaticamente na tela Modo de controle remoto depois que o robô for reinicializado.
Configurações avançadas de sinal
Todos os sinais a seguir são opcionais.
Precauções gerais
Esses itens não são obrigatórios.
A mesma porta e sinal não podem ser atribuídos de forma redundante.
Sinal de entrada de segurança

Configure o sinal de redefinição de intertravamento para inicializar dispositivos conectados.
Isso opera de forma idêntica à configuração de Redefinição de Intertravamento em E/S de segurança > Redefinição de Intertravamento no módulo de parâmetros do Robô.
Sinais de saída de segurança
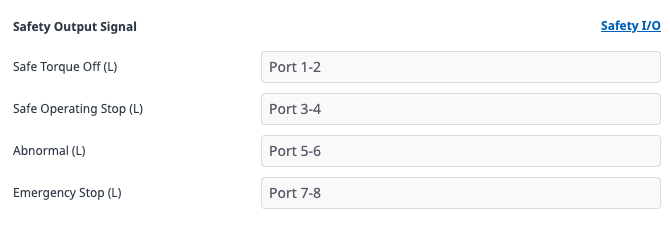
Você pode atribuir portas de saída para sinais de STO, SOS e Parada de emergência.
Se STO, SOS ou Parada de emergência já estiverem configurados na seção Sinais de saída de segurança do módulo de parâmetros do Robô, essas configurações serão aplicadas.
Observação
Para obter informações detalhadas sobre cada sinal, consulte a Sinal de segurança E/S. seção E/S de sinal de segurança.
Sinais de saída normais
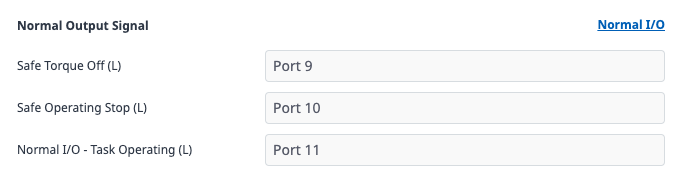
Você pode atribuir portas de saída para sinais de operação de STO, SOS e Tarefa.
Se os mesmos sinais já estiverem configurados na seção General Output Signals (Sinais de saída gerais ) do módulo de parâmetros do Robô, essas configurações serão aplicadas.
Sinais de entrada de controle
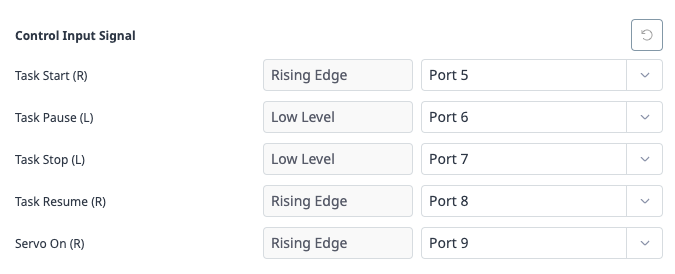
Você pode atribuir portas de entrada para os comandos Iniciar, Parar, Pausar, Continuar e Servo ligado.
Pressione o botão Reset (Redefinir) para limpar a configuração do sinal de entrada de controle.
Ligar/desligar

Você pode configurar portas de entrada para Ligar/Desligar.
A descrição exibida ao lado de cada porta de sinal indica a condição operacional desse sinal.
Borda ascendente
O sinal de entrada é ativado quando sobe.
Por exemplo, o sinal de início da tarefa é acionado quando a entrada sobe de 0 V para 24 V.
Ao tentar novamente, você deve primeiro retornar o sinal para 0 V antes de levantá-lo novamente.
Nível baixo
O sinal de parada tem prioridade sobre o sinal de partida.
Por exemplo, se o sinal Parar estiver em um nível baixo, o sinal Iniciar tarefa será ignorado e uma mensagem Sinal de E/S remoto ignorado será exibida.