
Módulo Jog Plus
O usuário pode selecionar um método de movimento manual na guia Desvio.
Desvio: Ele move a junta do robô ou TCP para o eixo da junta ou eixo de coordenadas selecionado pelo usuário
Mover: Ele move a junta do robô ou TCP para o ponto-alvo inserido pelo usuário
O movimento do robô consiste em dois tipos.
Movimento da articulação: Ele move cada articulação linearmente com um movimento de rotação
Movimento da tarefa: Ele move a extremidade linearmente para o ponto-alvo
O método a seguir é como mover o robô usando o movimento da articulação a partir da tela de desvio:
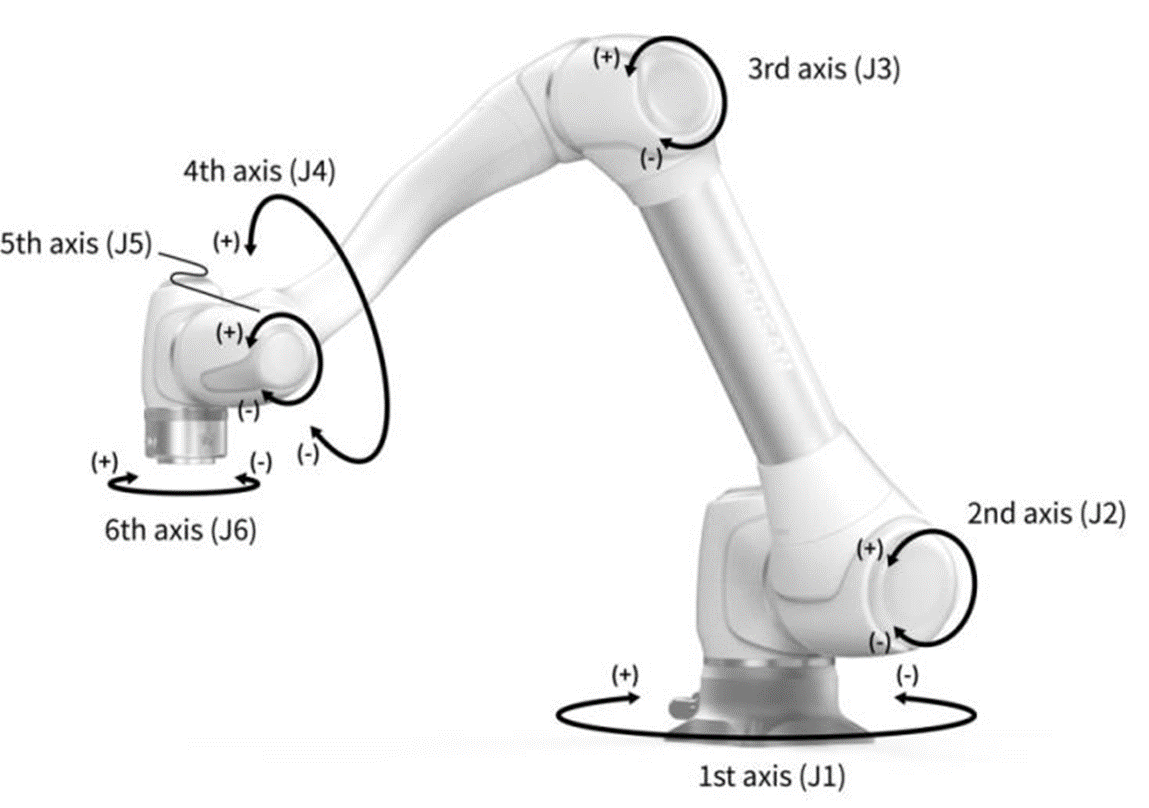
Selecione a guia Joint (Junta).
Selecione o eixo a ser movido. Por exemplo, você pode selecionar J1.
Pressione o botão para mover o robô. O robô se move enquanto o botão é pressionado e a localização atual é exibida na tela em tempo real.
O método a seguir é como mover o robô usando o movimento da tarefa na tela de desvio:
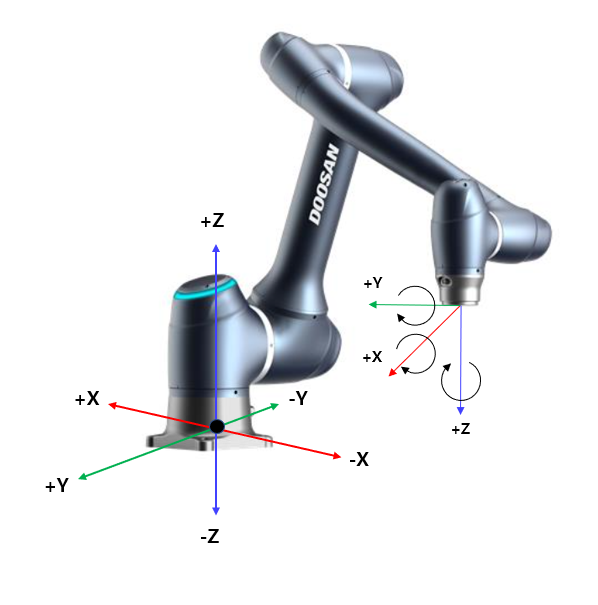
Selecione as coordenadas de base. O robô pode ser movido de acordo com as coordenadas DA BASE ou as coordenadas DA FERRAMENTA.
Selecione a direção a ser movida. Por exemplo, o eixo X pode ser selecionado.
Pressione o botão para mover o robô. O robô se move enquanto o botão é pressionado e a localização atual é exibida na tela em tempo real.
Para obter mais informações sobre movimento de desvio, Mover e Alinhar, consulte Painel de desvioe Painel de mover , respectivamente.
Observação
Se o interruptor de alternância do modo real na parte superior esquerda da tela de desvio estiver desligado, o robô se moverá somente na tela virtual à esquerda da tela de desvio. O robô real se move se o interruptor de alternância do modo real estiver ligado.
Com o módulo Jog Plus, o usuário pode explorar todo o espaço de trabalho no modo manual ou definir o espaço de operação como o espaço de operação do robô. O ângulo de movimento de cada eixo pode ser limitado de acordo com o espaço de operação selecionado e o limite do ângulo da articulação do ajuste de segurança.
Para usar a função Jog Plus, toque no Módulo Jog Plus no menu principal.
A função Jog não pode ser usada durante Servo desligado.
O robô é operado manualmente na tela Jog Plus, de modo que o robô só se move quando o botão Jog é pressionado.
É possível mover o robô com base na posição atual na tela da guia Jog Plus.
O robô pode ser movido configurando o ângulo/coordenadas alvo na tela da guia Mover.
É possível configurar as coordenadas de referência na tela da guia Jog Plus e na tela Mover guia como uma junta ou tarefa.
Observação
Se o robô não puder ser navegado por estar localizado em um espaço diferente do espaço de operação do modo Jog Plus, defina o espaço de operação do robô como "Nenhum" para permitir que o robô seja navegado.
Observação
Este módulo não está disponível no modo Automático. Tocar no botão de alternância no canto inferior direito o torna disponível no modo Manual.
O uso do Job Plus (Jog Plus) permite que você use o recurso de desvio simultaneamente enquanto executa um trabalho diferente. Isso pode ser utilizado quando o controle manual é necessário para mover o robô para o ponto-alvo durante o ensino.