
Posição inicial e cabine
Posição inicial
Menu
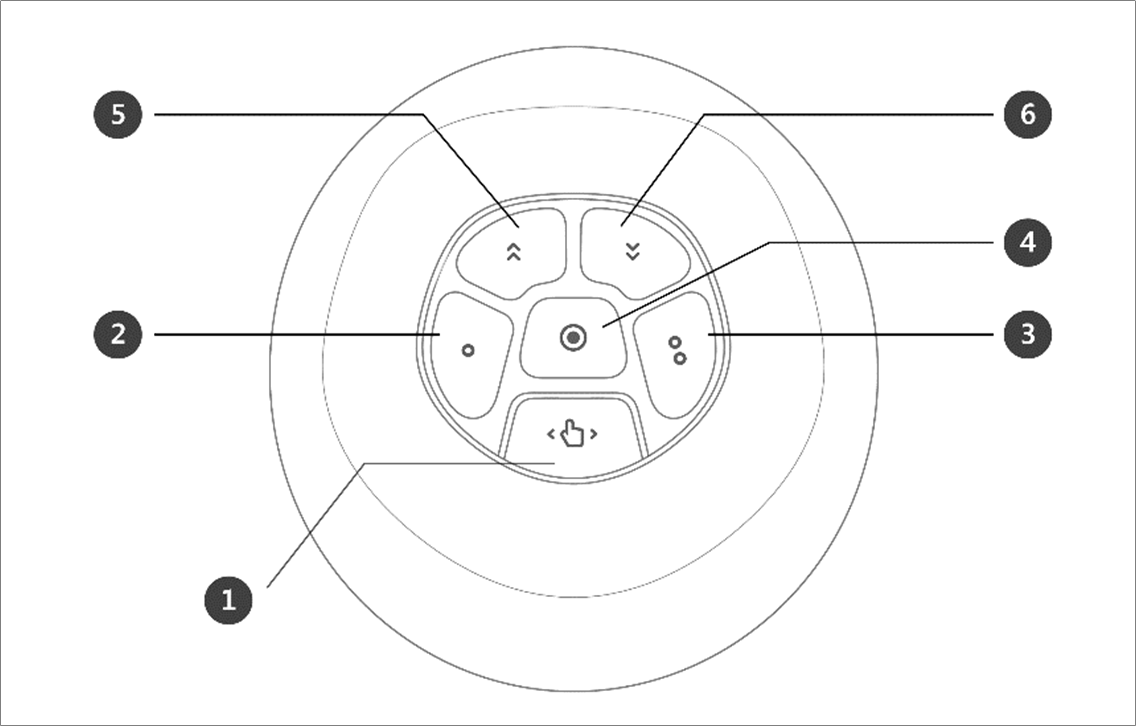
Itens | Descrição | |
|---|---|---|
| 1 | Opção de posição padrão | Esta é a seção onde você pode selecionar a opção Posição padrão. |
| 2 | Valor de posição padrão | Estes são os valores que correspondem à posição padrão, todos os quais são 0. |
| 3 | Opção de posição personalizada | Isso permite selecionar a opção Posição personalizada. |
| 4 | Valor da posição personalizada | Você pode verificar o valor da posição personalizada atualmente definido e a posição atual do robô. |
| 5 | Posição inicial | Esse botão permite definir a Posição padrão ou a Posição personalizada definida como Posição inicial. |
| 6 | Mensagem de aviso | Uma observação de cuidado ao configurar isso. |
| 7 | Salvar | Este botão permite que os valores de configuração sejam salvos. |
Aviso
Quando um robô ou junta de um robô está sendo trocado, a Posição inicial personalizada deve ser redefinida.
Cockpit
O ensino direto é usado para segurar a extremidade do robô com as mãos para empurrar e puxar o robô até a pose desejada e aplicar a pose ao movimento selecionado no momento. Existem dois métodos de ensino direto.
FreeDrive: Cada junta se move na direção em que a força aplicada pelo usuário
Movimento restrito: A extremidade do robô se move ou gira apenas na direção definida no movimento restrito, mesmo quando a força é aplicada a partir de uma direção aleatória
FreeDrive
Quando o botão 1 é pressionado, o modo FreeDrive é ativado, permitindo que o robô seja movido livremente. Cada junta se move na direção em que a força aplicada pelo usuário. O robô não pode ser movido manualmente depois que o botão for liberado.
Durante o ensino direto, o LED do robô pisca em ciano.
Pressionar o botão do guia manual na parte traseira do pendente de instrução ativará o modo FreeDrive, assim como pressionar o botão 1, e o robô poderá ser movido livremente.
Movimento restrito
Quando os botões 2 e 3 são pressionados, a extremidade do robô se move somente na direção correspondente à condição de restrição, mesmo quando a força é aplicada de uma direção aleatória. A condição de restrição pode ser definida com 2 de 4 das condições na figura a seguir: Eixo Z restrito, fixo plano restrito, superfície restrita e direção restrita.
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Imagem do cockpit | Esta é uma imagem das configurações da cabine. |
| 2 | Redefinir | Este botão permite inicializar os valores definidos. |
| 3 | 1 Configuração do botão | Esta é a seção onde você pode selecionar a função a ser definida para o botão 1. |
| 4 | 2 Configuração do botão | Esta é a seção onde você pode selecionar a função a ser definida para o botão 2. |
| 5 | Configuração de 1 e 2 botões | Esta é a seção onde você pode selecionar se deseja ativar a fixação para os botões 1 e 2. |
| 6 | Imagem do guia | Uma imagem-guia para os itens de configuração da cabine. |
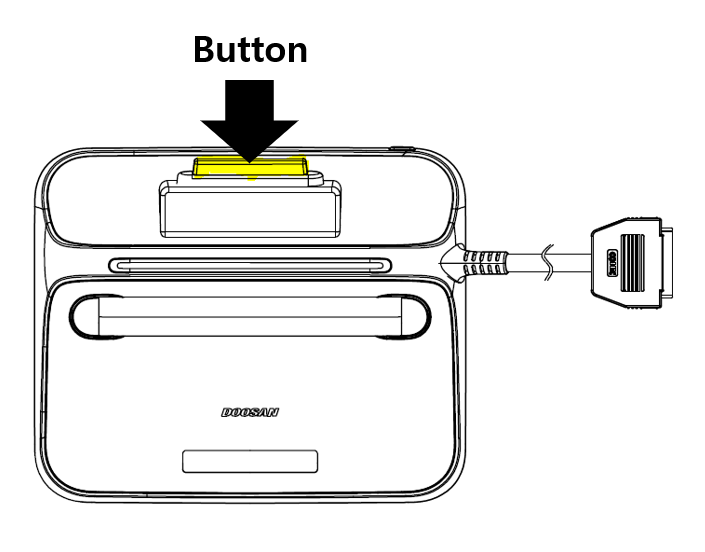
Obtenção do status do botão Cockpit
O usuário pode obter informações sobre se o botão Cockpit está pressionado ou liberado.
O robô fornece a função de controlar o botão Cockpit, permitindo que ele seja utilizado em várias aplicações.
Os "Dados de monitoramento" na API de comunicação fornecem informações sobre o botão Cabine.
Se você pressionar o botão Cockpit do robô ou vice-versa, poderá detectá-lo por meio da API do DRL.
DRL API: Get_cockpit_input (Consulte o Manual de Programação.)
Parâmetros: (int) índice
Devoluções: (int) 1: Pressionado (o botão é pressionado), 0: Liberado (o botão não está pressionado)