O que é um robô?
Limites funcionais de cada série de robôs
As diferentes séries de robôs (A, AS, E, M/H, P Series) limitam o uso de funções da seguinte forma:
Com base em corrente: A corrente do motor localizado em cada junta é usada.
Baseado em FTS: Um FTS (sensor de torque de força) localizado na extremidade do robô é usado.
Baseado em JTS: JTS (sensor de torque da junta) localizado em cada junta é usado.
Recursos | Série A/E (com base na corrente) | A Série S (atual, baseado em FTS) | Série M (baseado em JTS) | Série H (baseado em JTS) | Série P (baseado em JTS) |
|---|---|---|---|---|---|
Ensino direto
| O | O (com base na corrente) | O | O | O |
Ensino direto
| X | O (baseado em FTS) | O | O | O |
Detecção de colisão | O | O (com base na corrente) | O | O | O |
Medição da posição da instalação | X | O (baseado em FTS) | O | X (o robô só pode ser instalado no chão) | X (o robô só pode ser instalado no chão) |
Medição do peso da ferramenta | X | O (baseado em FTS) | O | O | O |
Medição do peso da peça | X | O (baseado em FTS) | O | O | O |
Função de ajuste fino | X | X | O | O | O |
Controle de força | O (configuração disponível somente em três direções de translação, excluindo rotação) | O (baseado em FTS) | O | O | O |
Controle de conformidade | O (configuração disponível somente em três direções de translação, excluindo rotação) | O (baseado em FTS) | O | O | O |
Limites funcionais de monitoramento de força para cada série de robôs
O pendente de instrução e o DART-Studio podem ser usados para monitorar dados de força. O comando DRL (check_force_condition()) também pode ser usado para monitorar dados de força externamente.
Se o modo de paletização estiver definido como "LIGADO": As mesmas funções de controle/monitoramento fornecidas no estado DESLIGADO estão disponíveis, exceto para os robôs das séries H, P.
Recursos | Série A/E (com base na corrente) | A Série S (baseado em corrente e baseado em FTS) | Série M (baseado em JTS) | Série H (baseado em JTS) | Série P (baseado em JTS) |
|---|---|---|---|---|---|
Controle de força | O (configuração disponível somente em três direções de translação, excluindo rotação) | O (baseado em FTS) | O | O | O |
O (Se o modo de paletização estiver definido como "LIGADO": Saída de controle de força limitada (Base Rx, orientação Ry) 1)) | O (Se o modo de paletização estiver definido como "LIGADO": Saída de controle de força limitada (Base Rx, orientação Ry) 1)) | ||||
Controle de conformidade | O (configuração disponível somente em três direções de translação, excluindo rotação) | O (baseado em FTS) | O | O | O |
O (Se o modo de paletização estiver definido como "LIGADO": Saída de controle de conformidade limitada (Base Rx, orientação Ry) 1)) | O (Se o modo de paletização estiver definido como "LIGADO": Saída de controle de conformidade limitada (Base Rx, orientação Ry) 1)) | ||||
Monitoramento de força (Pendente de instrução) | X | O (baseado em FTS) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) |
O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) | O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) | ||||
Monitoramento de força (DART-Studio) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (baseado em FTS) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) |
O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) | O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) | ||||
Monitoramento de força (Ao usar comandos DRL: | O (Valor de força de "0" mostrado para a seção de singularidade) | O (baseado em FTS) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) | O (Valor de força de "0" mostrado para a seção de singularidade) |
O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) | O (Se o modo de paletização estiver definido como "LIGADO": 4 graus de liberdade fornecidos para a base (x, y, z, rz)) |
Limite de saída de controle (Base Rx, orientação Ry): Os valores de controle de força ou conformidade correspondentes aos valores de controle de força ou conformidade correspondentes à orientação Rx base, ry não são emitidos. Inserir o valor de controle de força ou conformidade do eixo relevante (Base Rx, Ry) será ignorado como "0".
Visão geral da singularidade
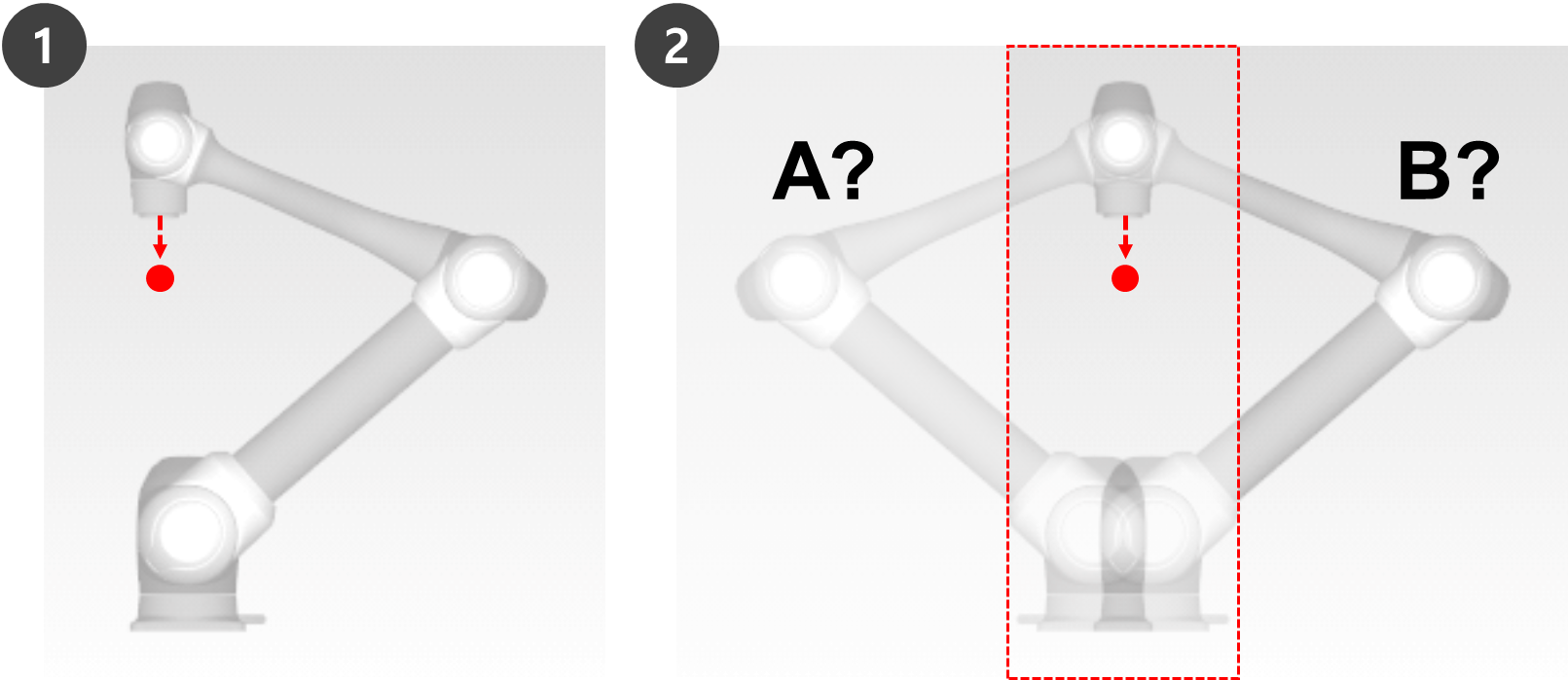
A singularidade em um robô com várias articulações refere-se a uma posição (ou ponto) em que o robô tem dificuldade em calcular sua próxima pose durante o movimento. Robôs com várias articulações calculam cada ângulo de articulação durante o movimento com base na extremidade do robô
Por exemplo, na Fig. 1 Abaixo, quando o robô estiver se movendo para o ponto vermelho, o robô não poderá determinar se deve mover suas juntas para definir a Posição A ou a Posição B, conforme mostrado na Fig. 2. Essa posição (ou ponto) é chamada de singularidade.
Perto de uma singularidade, o movimento do robô não é fluido em termos de plano, ponto e linha, o movimento linear final do robô pode não ser mantido e o erro de posição durante o controle pode aumentar. A singularidade ocorre em 3 casos, conforme mostrado na figura a seguir, inclusive quando as juntas do robô formam uma linha.
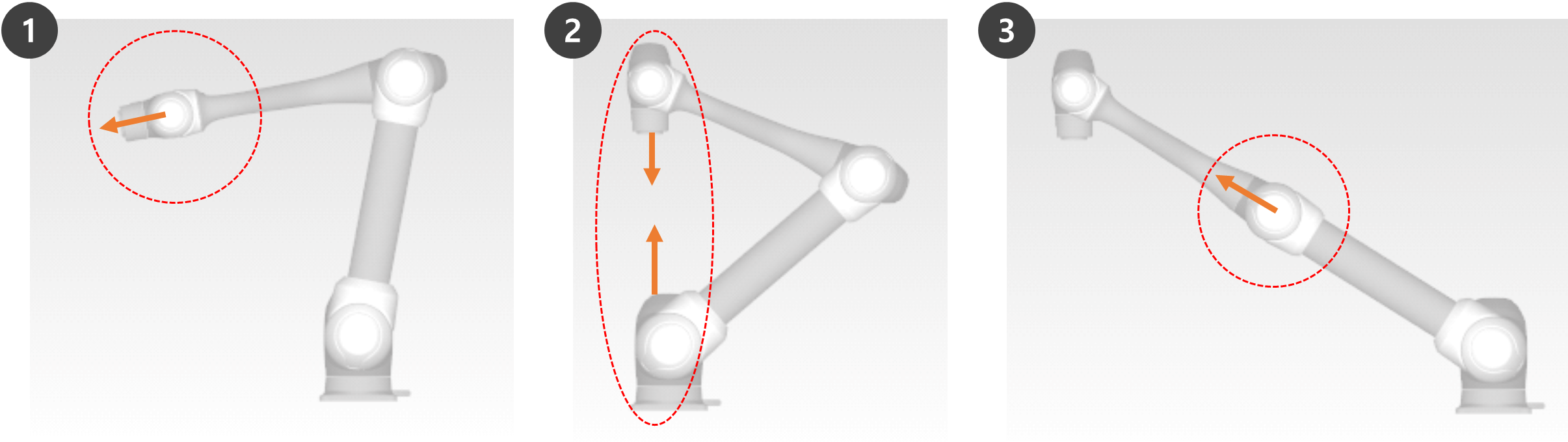
Singularidade do pulso: Quando o pulso do robô forma uma linha à medida que o Eixo 5 se aproxima de 0º
Quando comparados a um braço humano, os eixos 4, 5 e 6 correspondem à articulação do punho.
Singularidade do ombro: Quando os eixos 1 e 6 estão na mesma linha
Quando comparados a um braço humano, os eixos 1 e 2 correspondem à articulação do ombro.
Singularidade do cotovelo: Quando o robô forma uma linha à medida que o Eixo 3 se aproxima de 0º
Quando comparado a um braço humano, o Eixo 3 corresponde ao cotovelo.
Cuidado
As operações manuais e automáticas que se movem com a rotação da junta não são influenciadas pela singularidade.
Movimento da tarefa, comando MoveL, etc.
A singularidade só ocorre durante a operação manual e automática, onde o robô termina realizando movimento linear.
Movimento articular, comandos MoveJ, etc.
Na zona de singularidade, o controle de força ou de conformidade não está disponível.
Como a velocidade de rotação de determinados eixos aumenta rapidamente quando um movimento linear passa por uma singularidade, é possível que ocorra uma Violação do limite de velocidade da junta ou Violação do limite do ângulo da junta.
Como evitar a singularidade
Os robôs Doosan Robotics fornecem opções para evitar singularidades durante o controle de movimento. No entanto, é recomendável configurar uma tarefa que não crie exceções usando comandos de movimento de articulação, como MoveJ, em zonas de singularidade.
Aqui estão as opções de prevenção de singularidade fornecidas pelo Doosan Robot:
Prevenção automática: Executa o movimento evitando singularidades. No entanto, o movimento do robô pode diferir do caminho esperado.
Prioridade do caminho: Mantém o caminho e a velocidade, mas pode parar devido a um erro próximo a uma singularidade.
Velocidade variável: Mantém o caminho, mas desacelera perto de uma singularidade.
Visão geral do ângulo de Euler
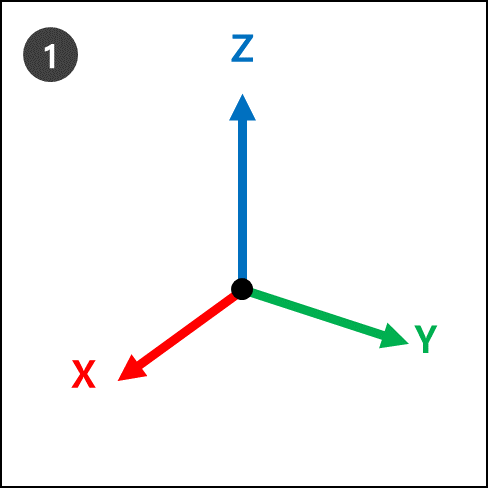
O ângulo de Euler é uma maneira de expressar os ângulos dos eixos X, Y e Z, que são perpendiculares entre si na direção do objeto. A, B e C referem-se aos ângulos de rotação sequencial. Cada fabricante de robôs define esta ordem de rotação A, B e C de forma diferente, como Rz-Ry-Rz, Rz-Ry-Rx ou Rx-Ry-Rz.
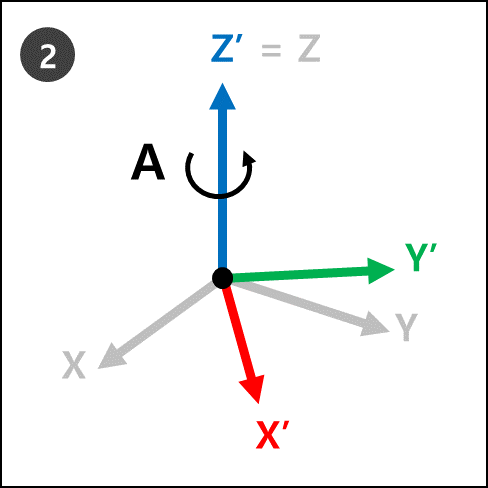
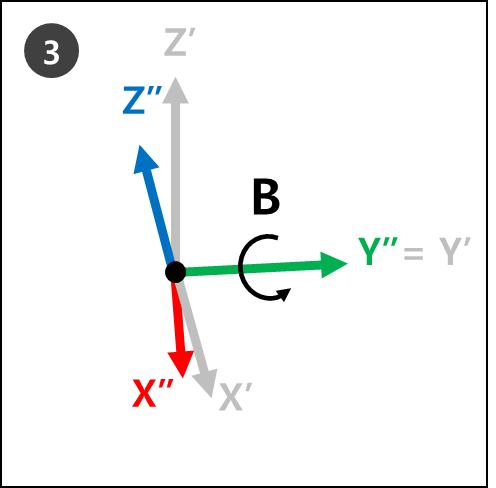
Por exemplo, RZ-Ry-Rx. Aqui, Rz significa a rotação no eixo Z, Ry significa a rotação no eixo Y e Rx significa a rotação no eixo X. Rz pode ser expresso como ângulo A, Ry como ângulo B e Rx como ângulo C para indicar a direção de rotação atual de um objeto. Observe que uma vez que a rotação é feita na direção do eixo Z a partir das coordenadas, as rotações serão feitas com base em novas coordenadas.
Isso pode ser visualizado com as etapas 1 a 4.
 |
 |
 |
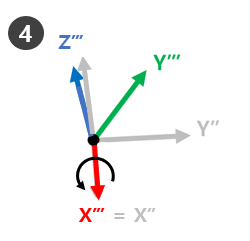 |
As novas coordenadas (Z''', Y'', X''' do passo 4 referem-se à rotação atual do robô quando os ângulos de Euler A, B e C são aplicados.
Isso pode ser facilmente visualizado com a mão direita. Faça a seguinte pose com a mão direita. Isso é chamado de Regra da Mão Direita, e fazer com que o polegar (eixo X), o dedo indicador (eixo Y) e o dedo médio (eixo Z) sejam perpendiculares um ao outro criará coordenadas que consistem nos eixos X, Y e Z.
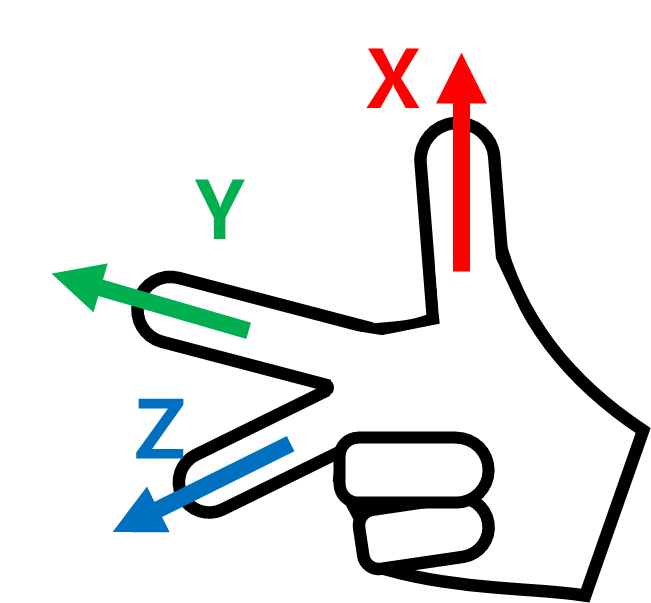
Em seguida, faça a postura cartesiana da regra do lado direito e faça rotações Rz, Ry e Rx em ordem sequencial.
RZ: Gire o dedo do meio (eixo Z) em um grau.
RY: Gire o dedo indicador (eixo Y) em graus B.
RX: Gire o polegar (eixo X) em graus C.
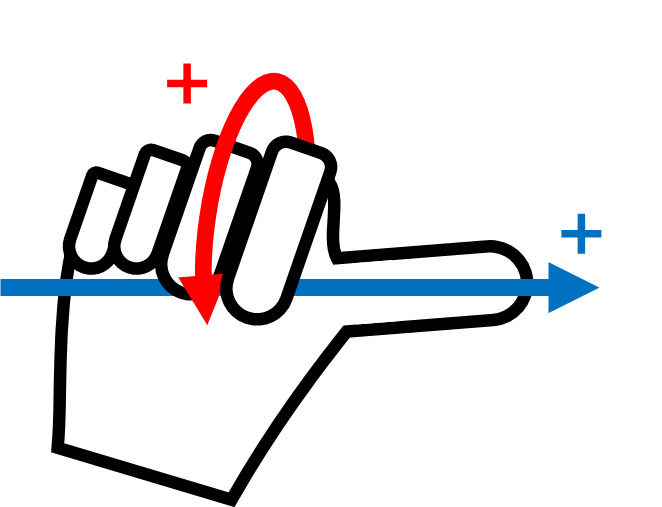
Observação
A direção de rotação positiva da direção de rotação positiva de A, B e C é a direção de quatro dedos, exceto o polegar, quando o polegar está apontando para a direção positiva e os quatro dedos estão cerrados. Isso é chamado de Lei do parafuso no sentido horário.