
Visão geral do conceito de conformidade/controle de força do comando Editor de tarefas
Controle de Força e Controle de Conformidade são funções que controlam a força do robô. Além disso, com a adição de comandos de movimento, a força pode ser controlada ao mesmo tempo que o movimento é feito. O Controle de conformidade e o Controle de força têm as seguintes diferenças, respectivamente.
Controle de conformidade
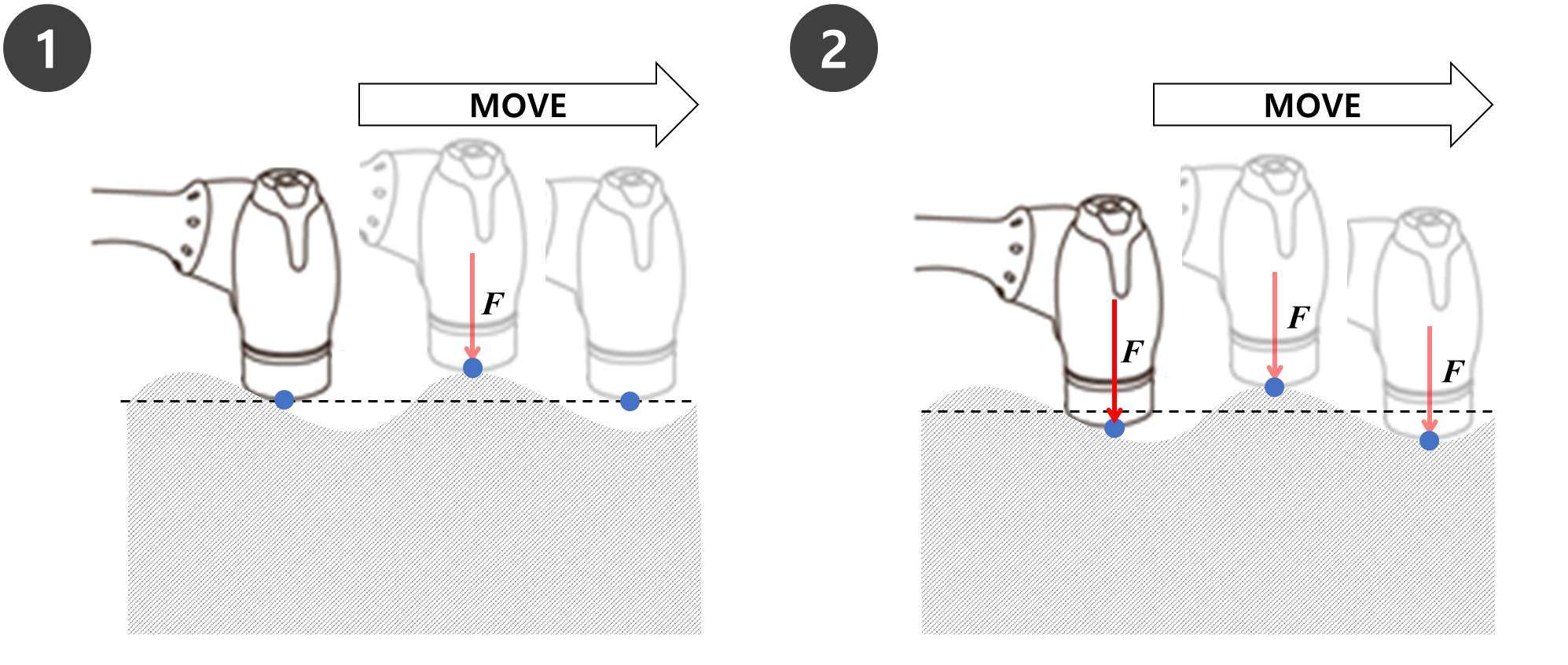
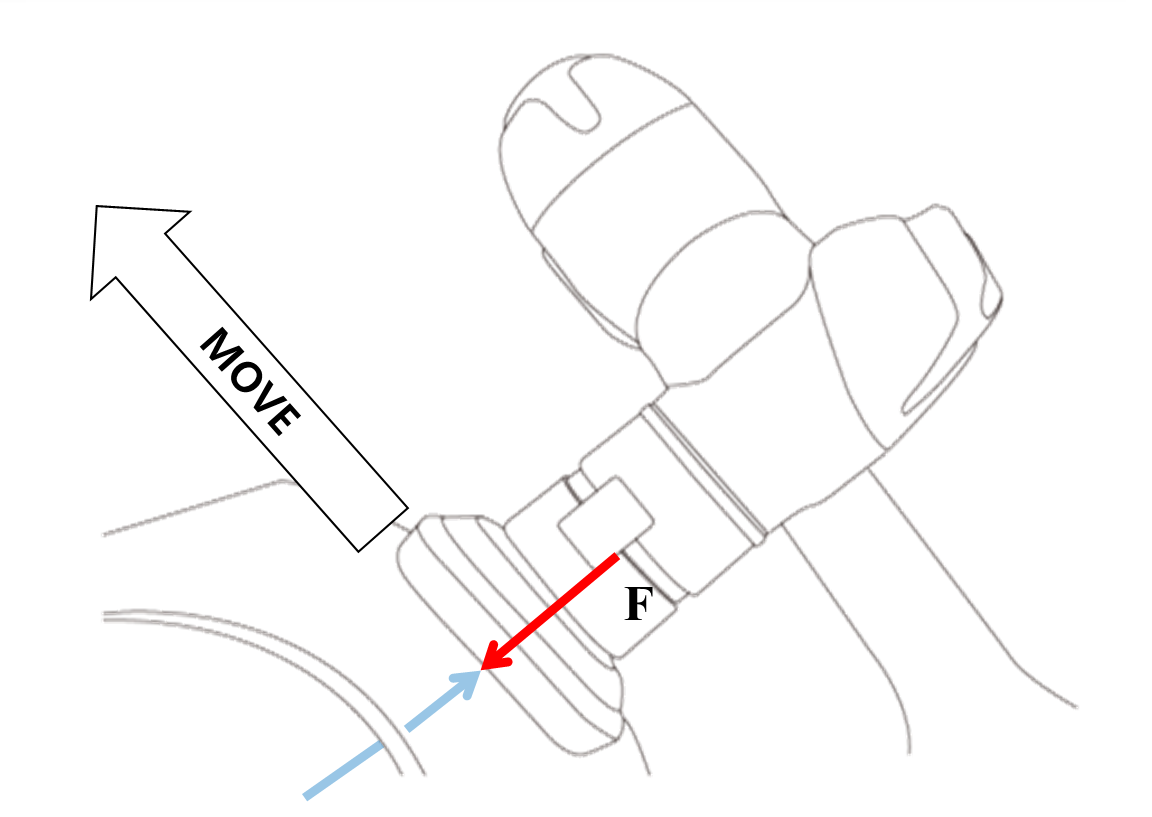
No caso do Controle de Conformidade, o robô está em conformidade com a força externa no TCP final do robô e, quando a força externa é removida, uma força é gerada para mover o robô de volta para onde deveria estar.
Essa abordagem pode ser utilizada quando um robô está se movendo em linha reta em uma superfície irregular e você deseja garantir que o robô se mova sem causar danos a si mesmo ou à superfície. Isso também pode ser utilizado para evitar colisões inesperadas perto de peças de trabalho.
Controle de força
No caso do Controle de Força, a força é aplicada ao TCP no final do robô. A aceleração é gerada na direção em que a força é gerada, fazendo com que o robô se mova simultaneamente na direção da força, além da direção do movimento.
Quando o robô entra em contato com um objeto, a força é aplicada ao objeto até que a força definida e a força repulsiva do objeto estejam em equilíbrio
Essa abordagem pode ser utilizada quando um robô está se movendo em linha reta em uma superfície irregular e você deseja garantir que uma força constante seja aplicada a uma superfície. Isso também pode ser utilizado para tarefas que exigem que o robô empurre com uma força constante, ou seja, trabalho de polimento.
Observação
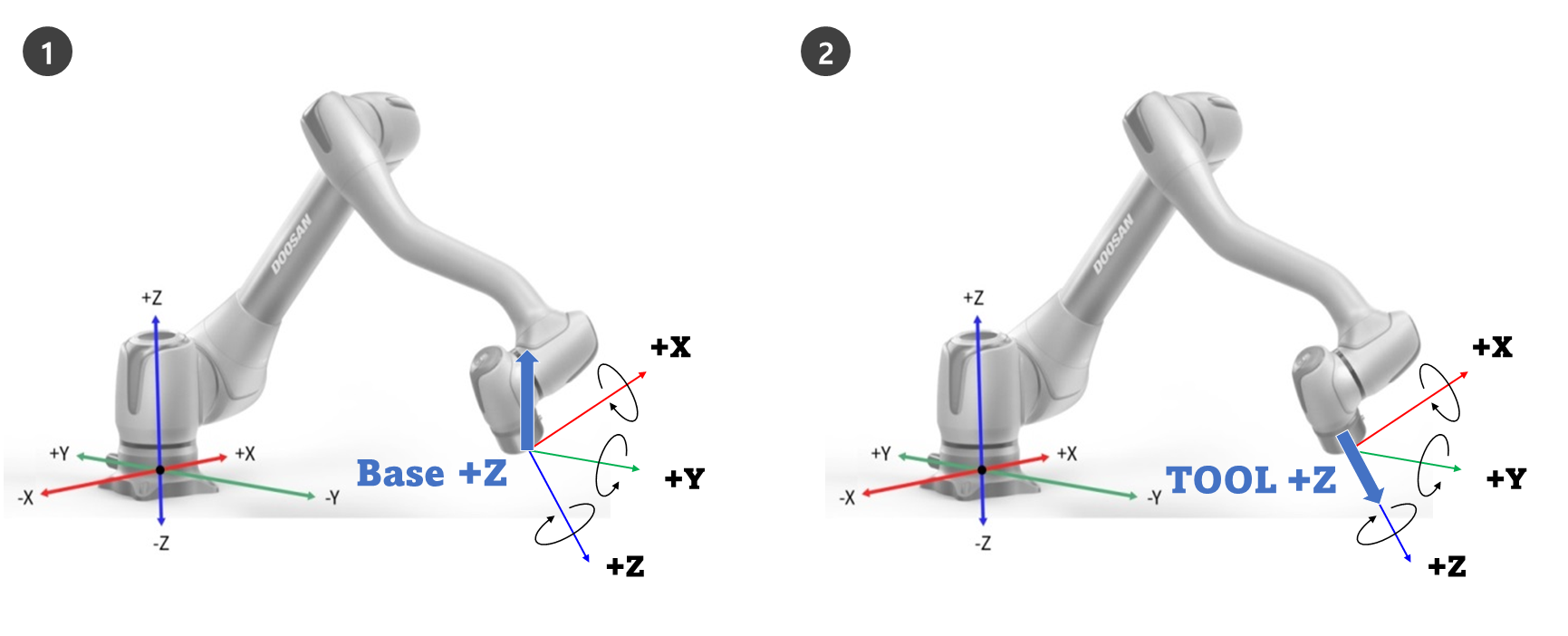
Os comandos Compliance e Force são executados com base nas coordenadas atuais. A coordenada padrão de uma tarefa é as coordenadas Base, e as coordenadas podem ser alteradas com o comando SET.
Fig. 1 é a direção de operação quando o controle de força/conformidade na direção Z é aplicado nas coordenadas de base.
Fig. 2 é a direção de operação quando o controle de força/conformidade na direção Z é aplicado nas coordenadas da ferramenta.
Controle de conformidade
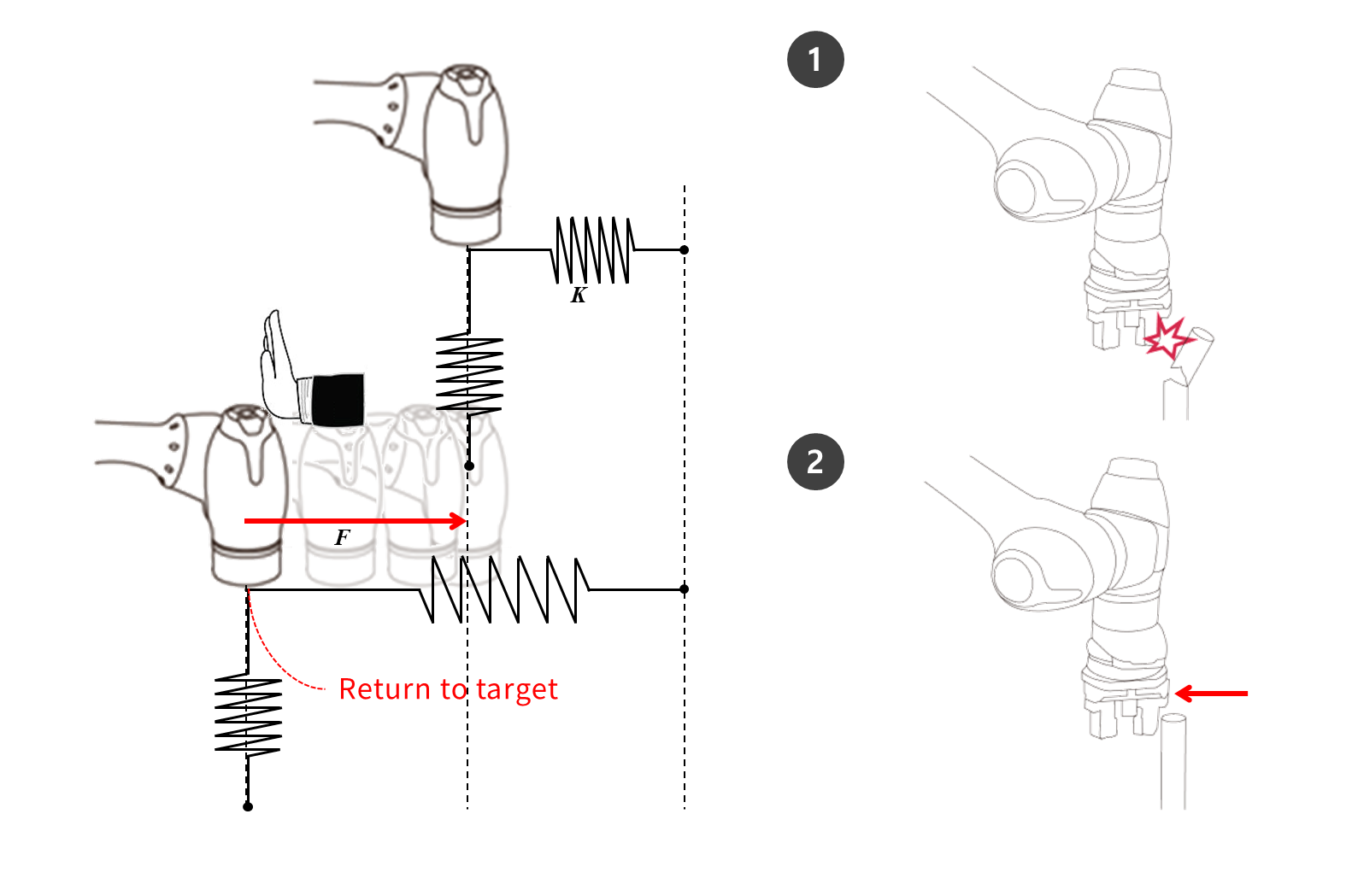
O controle de conformidade é a função que atende à força externa de acordo com a rigidez definida quando a força é aplicada no TCOP na extremidade do robô. Ele equilibra forças no ponto-alvo e é um método de controle que gera força repelente se o deslocamento ocorrer longe do ponto de equilíbrio. Durante o controle de conformidade, a extremidade do robô salta como uma mola.
Se ocorrer colisão quando o controle de movimento for usado sozinho, é possível que o objeto colidido seja danificado.
Os robôs Doosan Robotics param com segurança quando ocorre uma colisão, mas dependendo da configuração do usuário, como Limites de segurança > Sensibilidade de colisão, as seguintes situações podem ocorrer.
Se o controle de conformidade estiver definido como LIGADO durante o controle de movimento, o robô se moverá enquanto estiver em conformidade com o objeto colidido.
Se F for força externa, K for rigidez e X for distância, as fórmulas a seguir serão verdadeiras.
F * X.
F / X.
X: F / K.
Com base nas fórmulas acima, se a rigidez do controle de conformidade estiver definida como 1000N/m e se o robô se mover 1 mm, a força externa gerada será 1N.
F: 1000 N/m*0,001 m: 1 N (0,001 m: 1 mm)
Observação
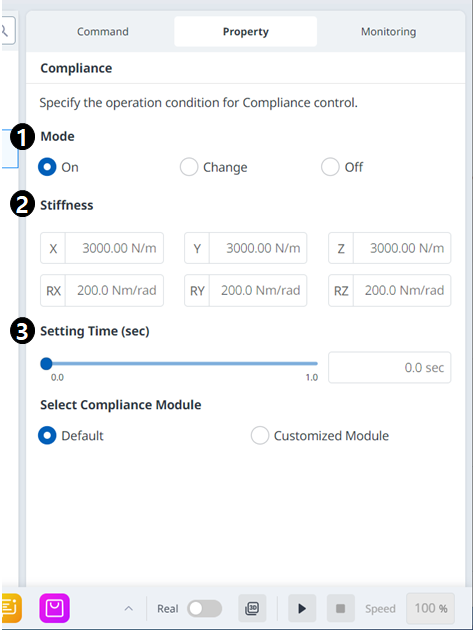
Na propriedade de Compliance Command, os seguintes valores podem ser definidos:
Modo
Ligado: Permite o controle de conformidade
Alterar: Se o modo de conformidade estiver definido como Ativado, ele mudará para Rigidez
Desligado: Desativa o controle de conformidade
Faixa de rigidez
Série M/H: Translação (0-20000N/m), rotação (0-1000Nm/rad)
Série A: Translação (0-10000N/m), rotação (0-300Nm/rad)
Valores de rigidez mais baixos responderão à força externa com mais cuidado e exigirão mais tempo para retornar ao ponto-alvo
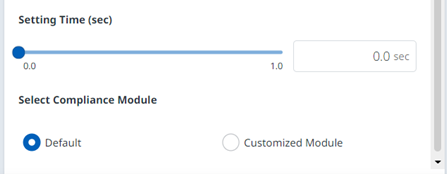
Ajuste da hora
É o tempo necessário para que o valor de rigidez atual atinja o valor de rigidez definido (0-1s)
Cuidado
O peso da ferramenta e o TCP (Ponto central da ferramenta) devem ser definidos com precisão. O peso impreciso da ferramenta pode fazer com que o robô detecte o peso da ferramenta como força externa, e configurar o Comando de Conformidade como LIGADO gerará erro de posição.
A tensão do conjunto de vestimentas pode gerar torque externo no robô. Portanto, tome cuidado ao instalar o conjunto de vestimentas.
A conformidade não pode ser ativada ou desativada enquanto o movimento assíncrono ou o movimento de mesclagem estiver sendo executado.
Durante o Comando de conformidade ativado, somente o movimento linear é permitido. Movimentos conjuntos, como MoveJ e MoveSJ, não são permitidos.
Durante o Comando de conformidade ativado, o Peso da ferramenta ou o TCP não podem ser alterados.
Durante o Comando de Conformidade Ligado, é possível não atingir com precisão o ponto alvo devido à conformidade do torque gerado durante a execução do movimento. Portanto, recomenda-se ativar o controle de conformidade próximo ao ponto-alvo. Ou, é possível minimizar o erro de posição definindo um valor de rigidez grande.
Controle de força
O Controle de Força é uma função que aplica força na direção do controle de força até que a força definida e a força repelente sejam equilibradas
Ele move o robô na direção da força definida e, se o contato com um objeto for feito, ele mantém a força inserida (N)
Ele é capaz de controlar o movimento em uma direção diferente da direção da força ao aplicar uma força constante
A configuração mínima é 10N, e pode ser ajustada com uma resolução de 0,2N
Forçar controle não está disponível na zona de singularidade
em geral, o Controle de Conformidade é usado em conjunto com o controle de força para que o controle de força esteja em conformidade com a força externa
Observação
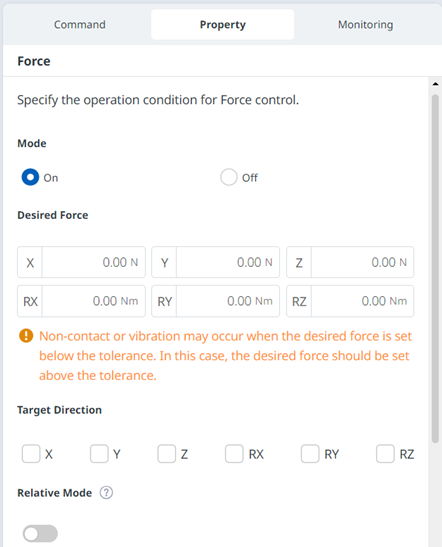
Na propriedade Force Command, os seguintes valores podem ser definidos.
Modo
Ligado: Ativa o Force Control
Desligado: Desativa o Force Control
Faixa de força desejada
X, Y, Z: 10 - (máximo de cada robô) N
A, B, C: 5 - (máximo de cada robô) Nm
Para obter mais informações sobre a força máxima, consulte Faixa de Limites Superior/Inferior e Valor Padrão dos Parâmetros de Segurança.
Direção-alvo
Ele se move para o valor alvo selecionado de cada direção.
Várias seleções podem ser feitas.
O controle de força só pode ser executado com a configuração de direção após a configuração de força.
Se uma das várias direções selecionadas atingir a força alvo, ela continuará a se mover até que o valor alvo seja atingido para a outra direção.
Modo relativo
Se esse modo estiver ativado, ele calibrará a força externa aplicada no robô para 0 para melhorar a precisão do controle de força.
Quando o modo Relativo está desativado, a força real aplicada no alvo é igual à soma da força definida e da força externa.
Quando o modo Relativo está ativado, a força real aplicada no alvo é igual à força definida.
Durante o controle de força, o desvio pode ocorrer dependendo da postura ou da força externa.
Durante o controle de força, é possível não atingir o ponto alvo exato. Portanto, recomenda-se ativar o controle de força próximo ao ponto-alvo.
Ajuste da hora
É o tempo necessário para que o valor da força atual alcance o valor da força ajustada (0-1s)
Comando Thread
Threads podem ser criados e executados no editor de tarefas.
Observação
As restrições para threads são as seguintes:
Um nome de thread não pode começar com um número e só pode conter letras minúsculas, números e sublinhados. O nome não deve exceder 30 caracteres ou ser duplicado com outro nome de thread.
Na tela do editor de tarefas, quando você clica no comando Thread, o comando Thread e o comando End Thread são adicionados ao painel da lista de tarefas. Um máximo de quatro threads é permitido por tarefa.
Os seguintes comandos não podem ser configurados sozinhos e devem ser implementados em instruções condicionais:
Mover, Mover L, Mover J, Mover SX, Mover SJ, Mover C, mover B, Mover Espiral, Mover Periódico, Mover JX
Definir, Definir, Sub, Thread, Quebrar, medida de peso
Comandos de controle de força (conformidade, força)
Comandos de sinal (Adicionar sinal, Definir sinal, Obter sinal, Excluir sinal)
Comandos avançados (guia manual, ajuste fino)
Comandos do usuário