
Módulo de recuperação
Módulo de recuperação: Se houver um erro com uma violação de segurança contínua ou se um robô precisar ser embalado para transporte, o usuário poderá usar o Modo de recuperação de segurança para configurar a posição e o ângulo do robô.

Para acessar o módulo Recuperação, toque no botão Recuperação localizado na parte inferior.
Recuperação de software: No status Servo desligado, se ocorrer uma situação de erro de violação de segurança causada por violações de segurança relacionadas à posição, como a saída do robô da área de operação ou a violação de áreas proibidas, ou se a força for aplicada continuamente quando o robô for parado devido a colisão com um objeto fixo, Servo ligado ou Jog não poderá ser definido mesmo ao tentar redefinir o robô para um estado normal usando o Jog ou o programa. Nesses casos, o modo Recuperação de software é usado para redefinir o robô para o normal.
Modo de embalagem: Para embalar e transportar o robô, o robô pode ser configurado para valores predefinidos (que vão além do limite de ângulo de operação normal) para transporte.
Se o servo estiver ativado quando o módulo de recuperação for iniciado, a seguinte janela pop-up será exibida e o servo será desligado automaticamente.
Usando o Modo de recuperação de software
Modo de recuperação de software
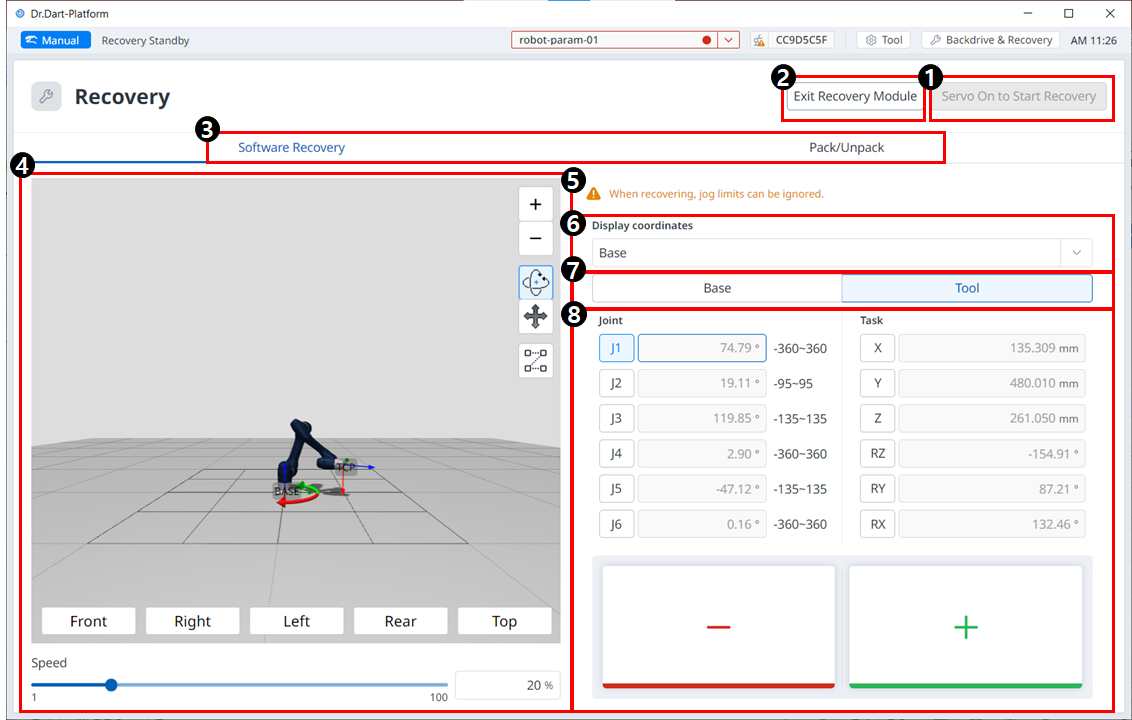
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Servo ligado para iniciar a recuperação | Este é um botão para ativar o servo antes de entrar no modo de recuperação. |
| 2 | Saia da Recuperação | Este botão permite sair do módulo Recuperação. |
| 3 | Cabeçalho | Esta seção permite selecionar o modo de Recuperação de software ou o modo embalar/desembalar. |
| 4 | Simulação 3D | Essa área permite visualizar uma simulação 3D dos valores definidos. |
| 5 | Mensagem de aviso | Isso explica as precauções. |
| 6 | Exibir coordenadas | É aqui que você pode definir a coordenada com base em Base ou Mundo. |
| 7 | Botão Base/Ferramenta | É aqui que você pode definir o valor com base em Base ou Ferramenta. |
| 8 | Conjunto/Tarefa | Esta seção permite inserir os valores desejados para fazer o robô se mover. |
Para usar o modo de recuperação de software, siga estas etapas:
Toque no menu Recuperação no painel de cabeçalho. A tela Recuperação de software aparece automaticamente na janela Recuperação.
Toque em cada botão de articulação no lado direito da tela Recuperação de Software e use
 os botões , para definir a posição. Ou pressione os botões do cockpit para ajustar o ângulo da articulação por ensino direto.
os botões , para definir a posição. Ou pressione os botões do cockpit para ajustar o ângulo da articulação por ensino direto.Para definições dos botões no cockpit, consulte Cabine
As alterações feitas na configuração são refletidas na janela de simulação à esquerda em tempo real.
Quando a configuração estiver concluída, toque no botão X no canto superior esquerdo para fechar a janela.
Cuidado
O modo de reparo de software não está disponível quando o limite do ângulo da junta é excedido em 3 graus.
Usando Pack/Unpack
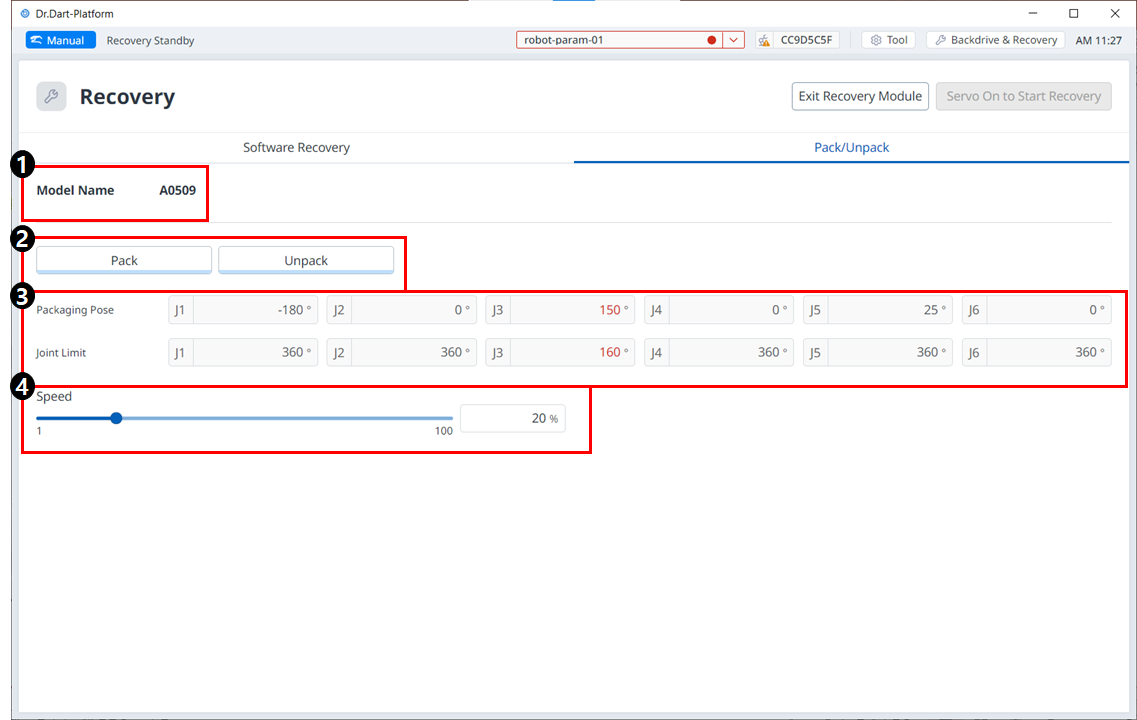
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Nome do modelo | O nome do modelo do robô conectado é exibido. |
| 2 | Embalar/desembalar | Pack ou Unpack pode ser selecionado. |
| 3 | Limite de postura/articulação da embalagem | Os valores de limite de pose e articulação são exibidos. |
| 4 | Relação de velocidade | A velocidade do modo embalar ou desembalar pode ser ajustada através de um controle deslizante ou entrada. |
Para configurar o modo de empacotamento, siga estas etapas:
Toque no menu Recuperação no painel de cabeçalho.

Selecione a guia Modo de embalagem.

Toque no botão Servo On to Start Recovery para ativar o modo de embalagem.

O robô se move automaticamente para a posição de embalagem definida.
O botão Pack permite que você coloque o robô na posição Pack e o botão Unpack permite que você coloque o robô na posição Home padrão.