
Mover painel
Menu
Itens | Descrição | |
|---|---|---|
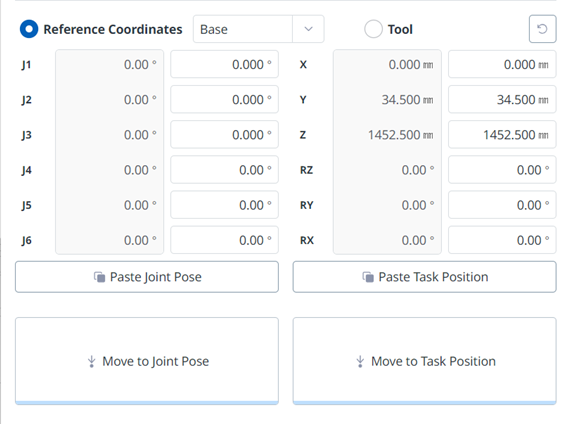
16 | Selecione o sistema de coordenadas de referência | Selecione o sistema de coordenadas de referência a ser usado para as coordenadas da tarefa na Figura 18. Você pode escolher coordenadas Base, Mundo ou Usuário. |
17 | Postura articular | Exibe a postura atual do robô e a postura da articulação alvo. |
18 | Postura da tarefa | Exibe a postura atual do robô e a postura da tarefa alvo que se encaixam no sistema de coordenadas de referência selecionado. |
19 | Cole a postura articular | Cole o valor Posture copiado para a área de transferência no painel Joint Posture (Postura da articulação). |
20 | Cole a postura da tarefa | Cole o valor Posture copiado para a área de transferência no painel Postura da tarefa. |
21 | Botão Joint Move (Mover articulação) | Este botão faz com que o robô se mova para a postura da articulação alvo. |
22 | Botão Mover tarefa | Este botão faz com que o robô se mova para a postura de tarefa alvo. |
Definir ângulo para mover
Para mover o robô em um ângulo específico, siga estas etapas:
Selecione a guia Mover.
Insira o ângulo alvo da junta do robô. (J4 está desativado para modelos da série P)
Ative o Modo Real.
Toque e segure o botão Move to Joint Pose correspondente para ajustar o ângulo da articulação do robô.
Definir coordenadas de referência de base para mover
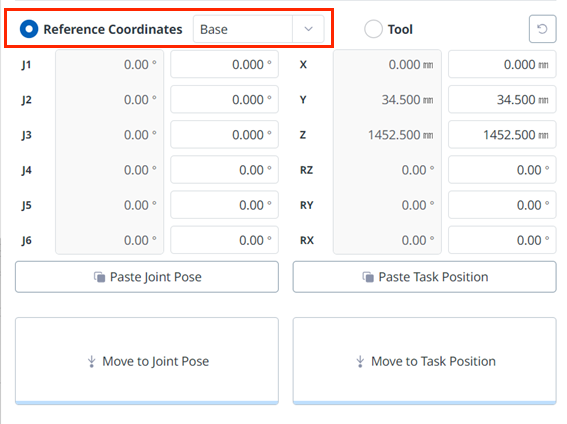
Para mover o robô com base em suas coordenadas de base, siga estas etapas:
Selecione a guia Mover e Coordenadas de referência.
Selecione a coordenada de exibição como base.
Toque e segure o botão Mover para Posição da Tarefa correspondente para mover para as coordenadas definidas.
Definir coordenadas mundiais Coordenadas de referência para mover
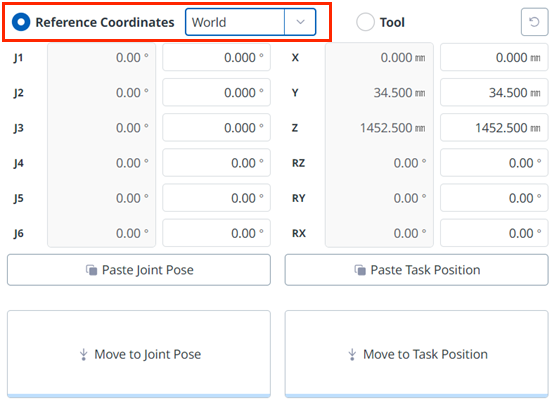
Para mover o robô com base nas Coordenadas Mundiais, siga estas etapas:
Selecione a guia Mover e Coordenadas de referência.
Selecione Mundo como as coordenadas de exibição e selecione a guia Mundo.
Configure a pose para se mover com referência às Coordenadas Mundiais.
Toque e segure o botão Mover para Posição da Tarefa correspondente para mover para as coordenadas definidas.
Definir coordenadas para mover com base na ferramenta
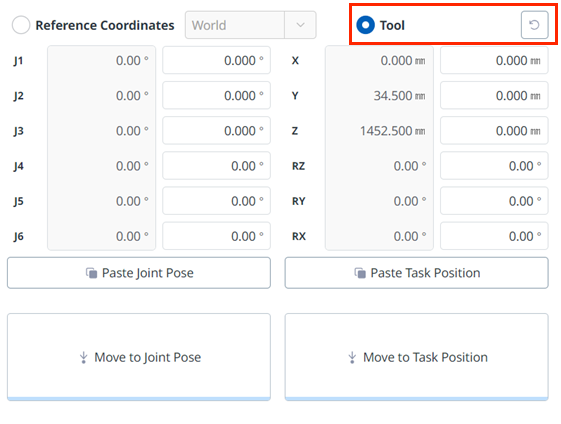
Para mover o robô com base nas coordenadas da ferramenta, siga estas etapas:
Selecione a guia Mover e selecione a guia Ferramenta.
Configure a pose para mover com referência à ferramenta.
Toque e segure o botão Mover para Posição da Tarefa correspondente para mover para as coordenadas definidas.