
Painel de desvio
Menu
Itens | Descrição | |
|---|---|---|
| 1 | Selecione o tipo de painel | Você pode escolher a localização do botão Mover. |
| 2 | Simulação 3D | Este é o visualizador 3D, onde você pode ver como o robô se parece. |
| 3 | Alinhamento do Simulador | Você pode utilizar esta seção para orientar o simulador. |
| 4 | Use Incremento | Este botão permite ativar incrementos de ângulo ou posição. |
| 5 | Incremento de ângulo | Esta seção é onde o incremento do ângulo no eixo selecionado é definido. |
| 6 | Incremento de posição | Esta seção é onde o incremento de posição no eixo selecionado é definido. |
| 7 | Colisão | Este campo é onde você define a Colisão do robô. |
| 8 | Monitoramento de força | Esta seção é onde você define as forças nos eixos X, Y e Z com base em Base, Ferramenta, Mundo, Referência e entre outros. |
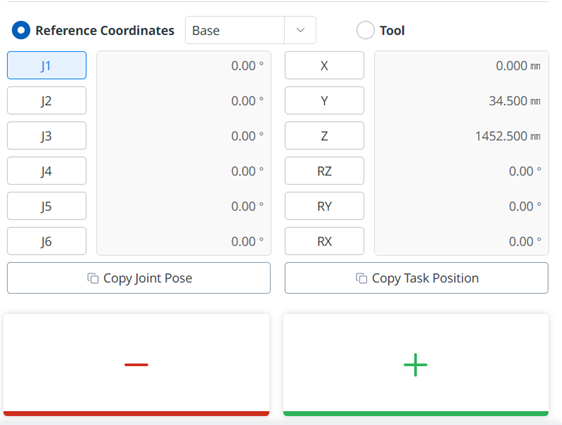
| 9 | Selecione o sistema de coordenadas de referência | Selecione o sistema de coordenadas de referência a ser usado para as coordenadas da tarefa na Figura 11. Você pode escolher coordenadas Base, Mundo ou Usuário. |
| 10 | Painel de junção | Você pode selecionar o eixo da articulação a ser deslocado. |
| 11 | Painel de tarefas | Você pode selecionar o eixo da tarefa a ser deslocado. |
| 12 | Botão Copiar pose J. | Este botão permite copiar J de pose |
| 13 | Botão Copiar posição X. | Este botão permite copiar a Posição X. |
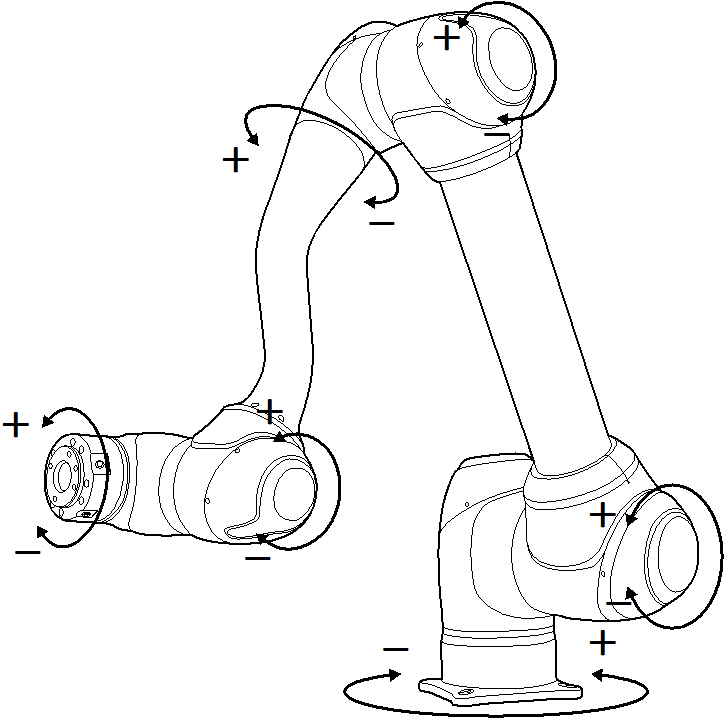
| 14 | Mover - botão | Você pode fazer com que o robô se mova na direção - com base em cada eixo. Neste momento, você pode descobrir a direção do - e mais na simulação 3D no lado esquerdo. |
| 15 | Botão Mover | Você pode fazer com que o robô se mova na direção positiva com base em cada eixo. Neste momento, você pode descobrir a direção do - e mais na simulação 3D no lado esquerdo. |
Executar com base na articulação do robô
Para ajustar o ângulo com base na junta do robô, siga estas etapas:
Selecione o eixo (J1-J6) para ajustar o ângulo no Joint Panel.
Pressione e segure os botões de direção (
 ,
,  ) para ajustar o ângulo do eixo correspondente.
) para ajustar o ângulo do eixo correspondente.
Executando com base na base do robô

Para mover o robô com base em suas coordenadas de base, siga estas etapas:
Selecione a Base como um sistema de coordenadas de referência.
No painel de tarefas, selecione o eixo (X a RX) para o qual deseja ajustar o ângulo.
Pressione e segure o botão de direção para mover o eixo correspondente.
Execução baseada em Coordenadas Mundiais

Para mover o robô com base nas Coordenadas Mundiais, siga estas etapas:
Selecione o Mundo como um sistema de coordenadas de referência.
No painel de tarefas, selecione o eixo (X a RX) para o qual deseja ajustar o ângulo.
Pressione e segure o botão de direção para mover o eixo correspondente.
Executando com base na ferramenta Robô

Para mover o robô com base na ferramenta do robô, siga estas etapas:
Selecione a ferramenta como um sistema de coordenadas de referência.
No painel de tarefas, selecione o eixo (X a RX) para o qual deseja ajustar o ângulo.
Pressione e segure o botão de direção para mover o eixo correspondente.
Observação
A área de segurança não se aplica no modo virtual.
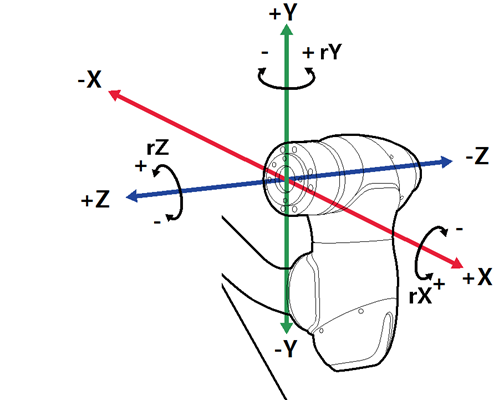
RX, Ry e RZ são executados de acordo com TCP (posição central da ferramenta).