
CONTROLADOR DC (CS-12P)
Introdução ao produto (CS-12P)
Nome de cada peça e funções
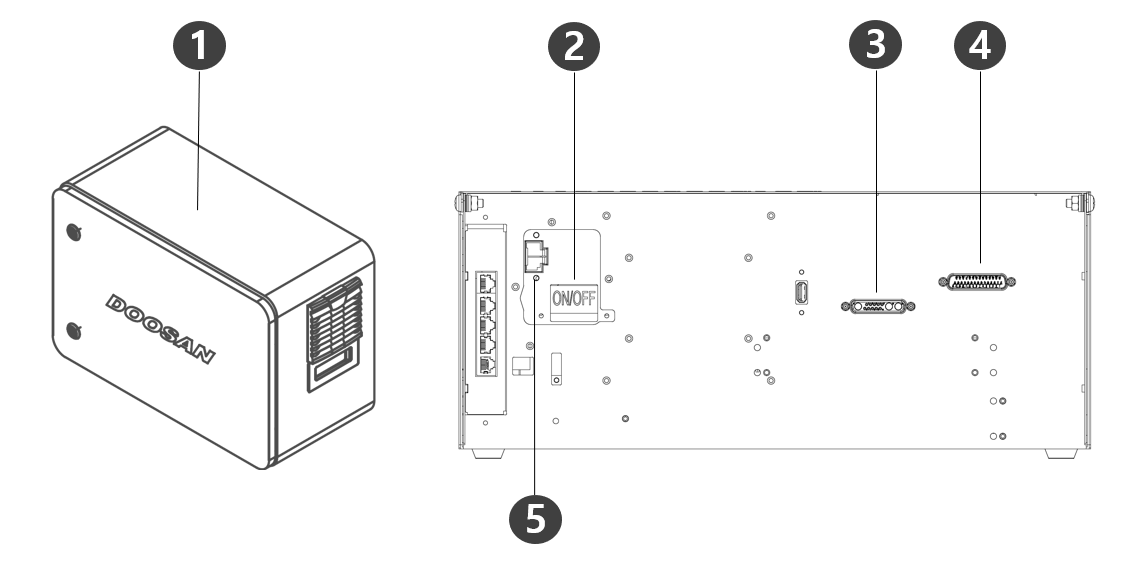
No. | Itens | Descrição |
1 | Terminal de conexão de E/S (interno) | Ele pode ser conetado com controladores ou periféricos de outros robôs. |
2 | Botão liga/desliga | Usado para LIGAR/desligar a alimentação principal do controlador. |
3 | Ensine o terminal de conexão do cabo do pendente | Usado para conectar o cabo do pendente de instrução ao controlador. |
4 | terminal de conexão do cabo do robô | Usado para conectar o cabo do robô ao controlador. |
5 | Terminal de conexão de energia | Usado para conectar a fonte de alimentação do controlador. |
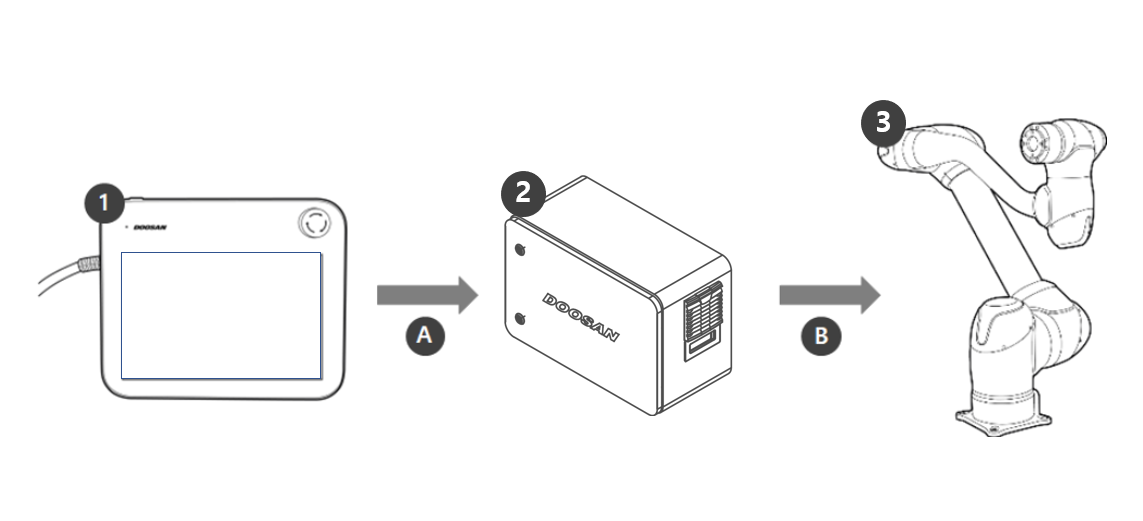
Configuração do sistema
No. | Nome | Descrição |
|---|---|---|
1 | Ensinar pendente | Este dispositivo gerencia todo o sistema e é capaz de ensinar poses específicas do robô ou fazer configurações relacionadas aos manipuladores e controladores. |
2 | Controlador | Ele controla o movimento do robô de acordo com a pose ou movimento definido pelo pendente de instrução. Possui várias portas de E/S que permitem a conexão e o uso de vários equipamentos e dispositivos. |
3 | Manipulador | É um robô colaborativo industrial que pode realizar tarefas de transporte ou montagem com várias ferramentas. |
A | Comando/Monitoramento | |
B | Fonte de alimentação/rede |
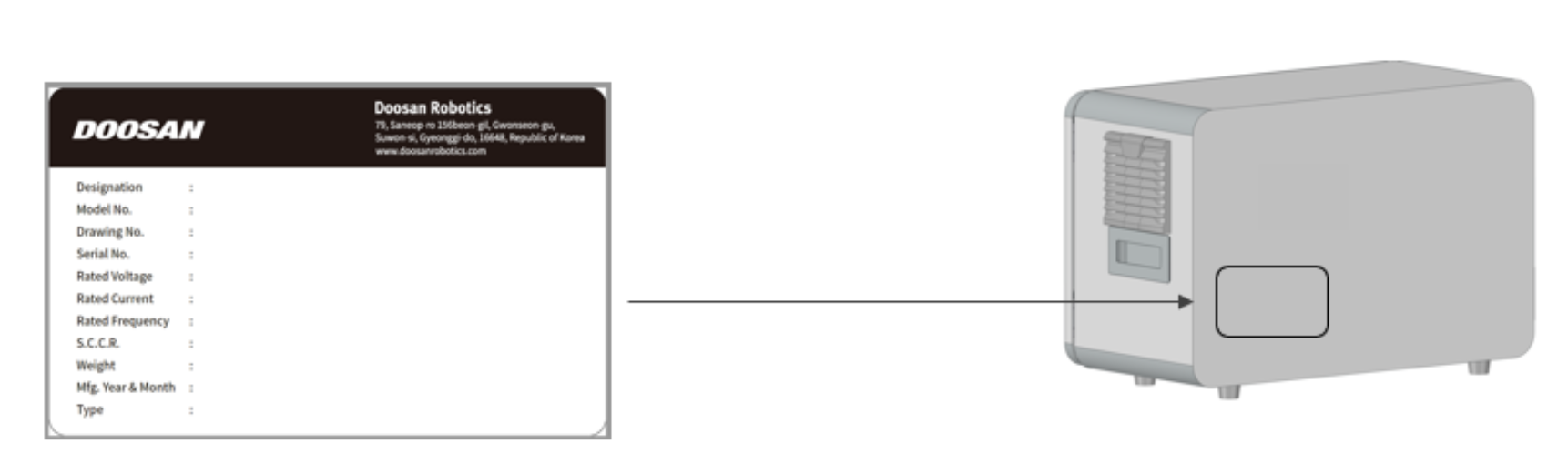
Placa de identificação e etiqueta
Instalação (CS-12P)
Cuidados durante a instalação
Cuidado
Garanta espaço suficiente antes de instalar o controlador. Se não houver espaço suficiente, o controlador pode ser danificado ou o cabo do manipulador ou do pendente de instrução pode estar em falta.
Verifique a fonte de alimentação de entrada ao conectar a energia ao produto. Se a fonte de alimentação de entrada conectada for diferente da entrada de alimentação nominal (22 VCC), o produto não funcionará corretamente ou o controlador poderá ser danificado.
Ambiente de instalação
Ao instalar o controlador, considere o seguinte.
Garanta espaço suficiente antes de instalar o controlador.
O controlador deve ser fixo.
Certifique-se de que nenhum componente não esteja fixado no veículo móvel.
Instalação do hardware
Instale o robô, o controlador e o pendente de instrução, os principais componentes do sistema e forneça energia a eles antes de operar o manipulador. A instrução para instalar cada elemento é a seguinte:
Conectando o Manipulador ao Controlador
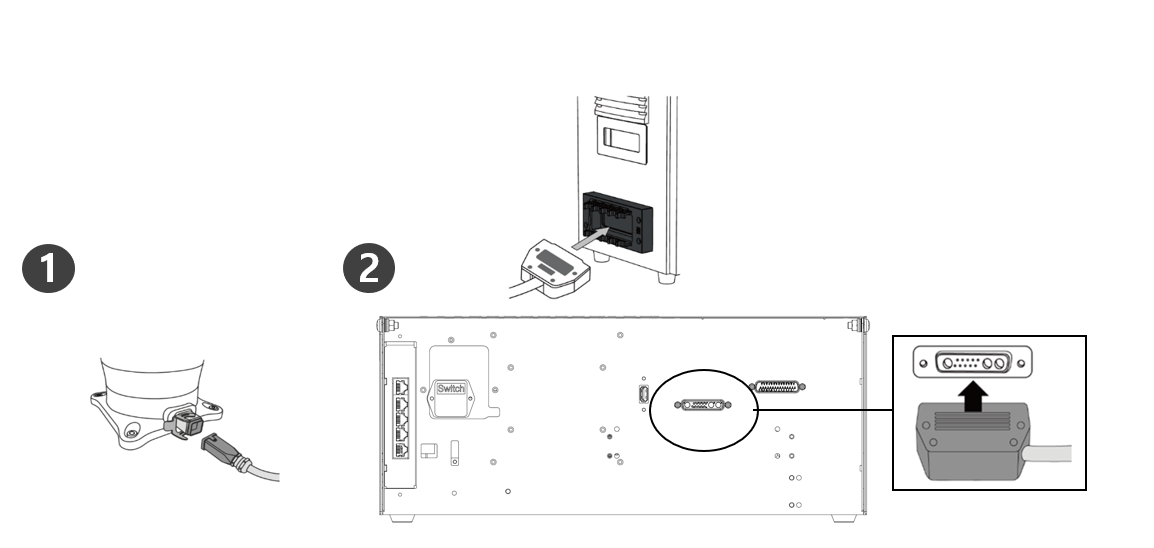
Descrição | |
|---|---|
1 | Conecte o cabo do manipulador ao controlador, coloque um anel de fixação
|
2 | Conectando a extremidade oposta do cabo de conexão do manipulador ao controlador
|
Cuidado
Não desconecte o cabo do manipulador enquanto o robô estiver ligado. Isso pode causar mau funcionamento do robô.
Não tente fazer modificações ou extensões no cabo do manipulador.
Ao instalar o controlador no chão, prenda pelo menos 50 mm de folga em cada lado para garantir a ventilação adequada.
Certifique-se de travar corretamente os conectores antes de ligar o controlador.
Observação
Ao configurar o sistema, é recomendável instalar um redutor de ruído para evitar efeitos de ruído e mau funcionamento do sistema.
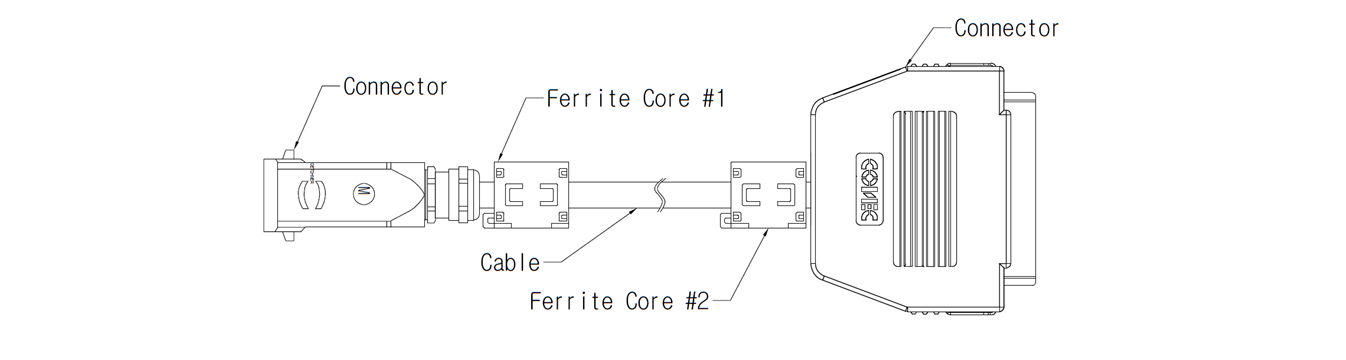
Se o controlador for influenciado pelo ruído gerado por ondas eletromagnéticas, é necessário instalar um núcleo de ferrite para garantir a operação normal. O local de instalação é o seguinte:
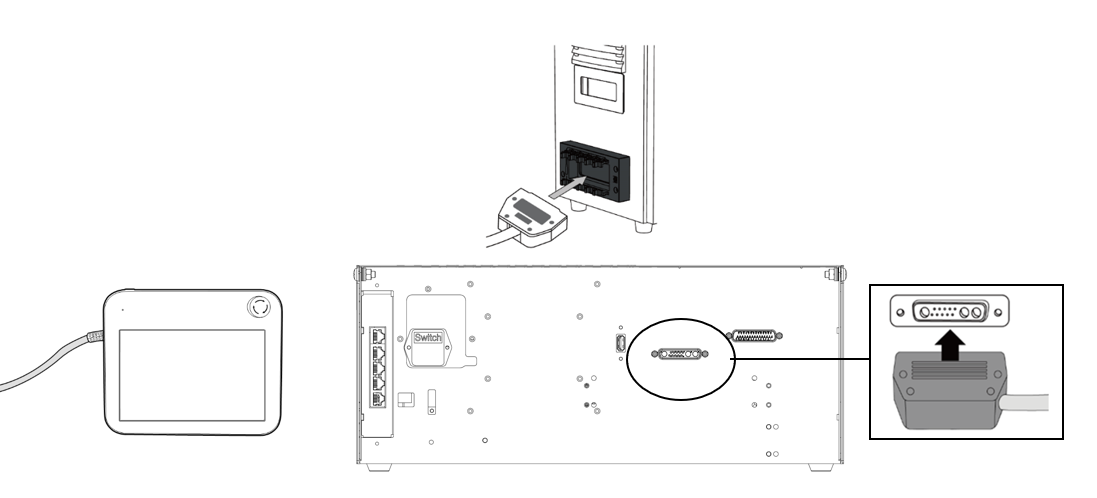
Conecte o controlador ao pendente de instrução
Conecte o cabo do pendente de instrução às conexões correspondentes no controlador até ouvir um clique e certifique-se de que o cabo esteja conectado firmemente.
Cuidado
Ao conectar o cabo, verifique o formato da conexão antes de conectá-lo para que o pino não dobre.
Se o pendente de instrução for usado pendurado no veículo móvel ou no controlador, tenha cuidado para não tropeçar nos cabos de conexão.
Tenha cuidado para não permitir que o controlador, o pendente de instrução e o cabo entrem em contato com a água.
Não instale o controlador e o pendente de instrução em um ambiente empoeirado ou úmido.
Os controladores e o pendente inteligente nunca devem ser expostos a ambientes de poeira acima do grau IP20. Tenha cuidado especial em ambientes com poeira condutora.
Observação
Ao configurar o sistema, é recomendável instalar um redutor de ruído para evitar efeitos de ruído e mau funcionamento do sistema.
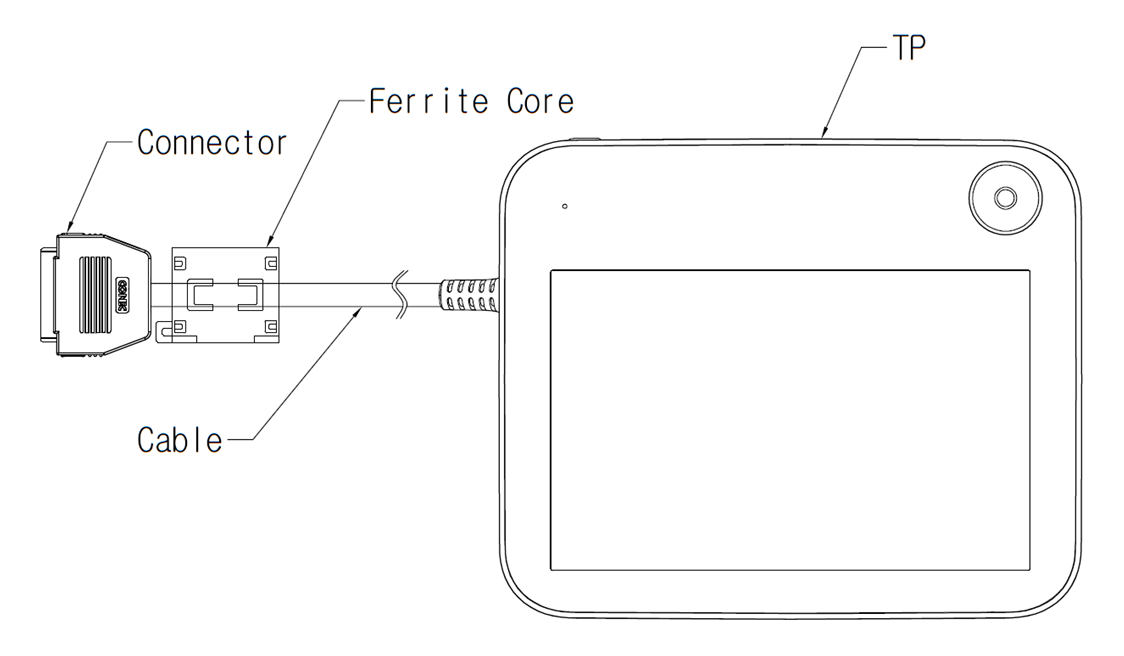
Se o pendente de instrução for influenciado pelo ruído gerado por ondas eletromagnéticas, será necessário instalar um núcleo de ferrite para garantir a operação normal. O local de instalação é o seguinte:
Colocação do cabo do manipulador e do cabo pendente de instrução
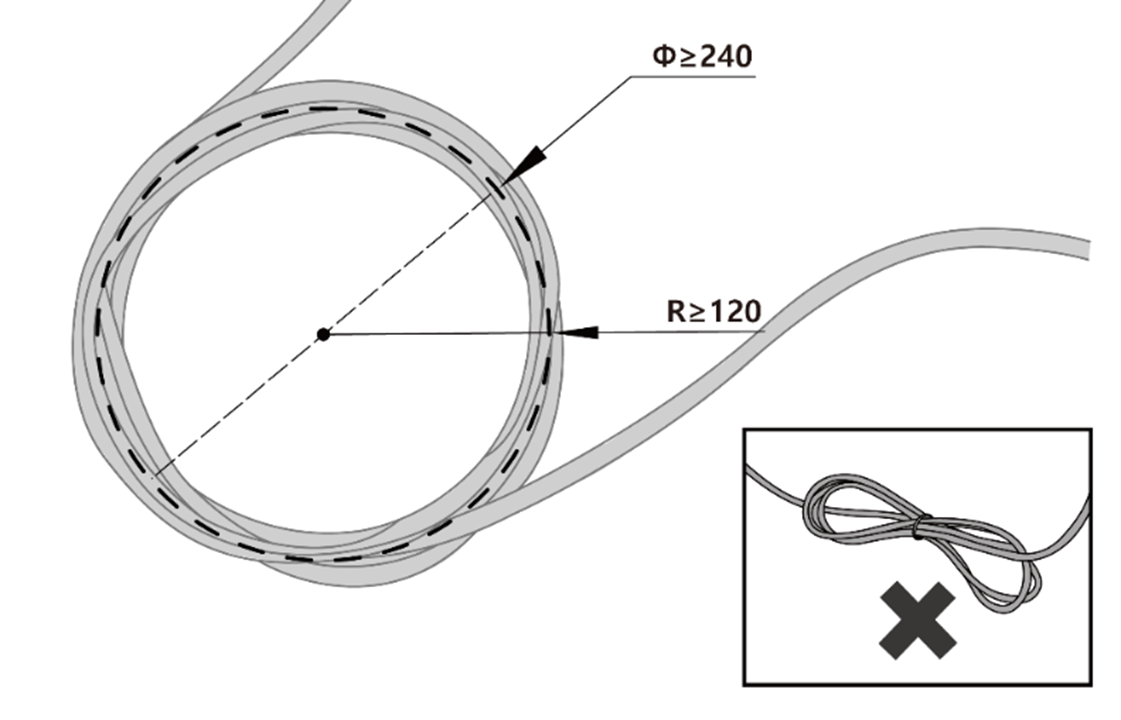
Certifique-se de que o raio de curvatura do cabo do manipulador e do pendente de instrução seja maior que o raio de curvatura mínimo (120 mm).
Cuidado
Certifique-se de que o raio de curvatura entre o cabo do pendente de instrução e o conector do pendente de instrução seja maior que o raio de curvatura mínimo (120 mm).
Se o raio de curvatura for menor que o raio de curvatura mínimo (120 mm), poderá ocorrer desconexão do cabo ou danos ao produto.
Em ambientes onde pode ocorrer ruído eletromagnético, a instalação adequada do cabo deve ser tomada para evitar mau funcionamento.
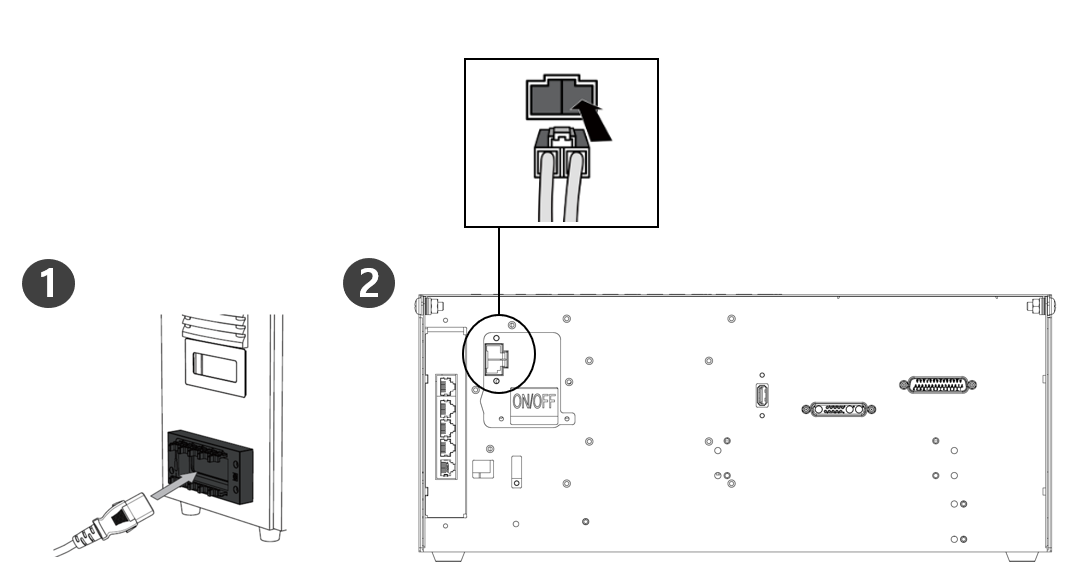
Conectando a energia ao controlador
Conecte o cabo de alimentação às conexões correspondentes no controlador até ouvir um clique e certifique-se de que o cabo esteja conectado firmemente.
Aviso
Certifique-se de que o robô esteja devidamente aterrado após conectar os cabos de alimentação (conexões de aterramento elétrico). Estabeleça um aterramento comum para todos os equipamentos no sistema com parafusos não utilizados relacionados ao símbolo de aterramento dentro do controlador. O condutor de aterramento deve satisfazer a classificação de corrente máxima do sistema.
Proteja a energia de entrada do controlador usando dispositivos como um disjuntor.
Não modifique nem estenda o cabo do robô. Isso pode causar incêndio ou quebra do controlador.
Certifique-se de que todos os cabos estejam conectados corretamente antes de fornecer energia ao controlador. Use sempre o cabo original incluído na embalagem do produto.
Tenha cuidado para não conectar a polaridade da tensão de entrada incorretamente.
Observação
Ao configurar o sistema, é recomendável instalar um interruptor de energia capaz de desligar todos os dispositivos de uma só vez.
Ao usar um controlador para CC, o movimento do robô pode ser limitado dependendo da carga e do movimento.
Se a tensão de entrada for inferior a 48 V, o movimento do robô pode ser limitado de acordo com a carga e o movimento.
A fonte de alimentação deve atender aos requisitos mínimos, como aterramento e disjuntores. As especificações elétricas são as seguintes:
Parâmetro | Especificações |
Tensão de entrada | 22 A 60 VCC |
Corrente de entrada nominal | 30 A. |