
Experimente amostras de comando de conformidade
Cuidado
Antes de tentar a amostra, certifique-se de ler e seguir as Precauções. Para obter mais informações, consulte a PARTE 1. Manual de Segurança.
Observação
Se houver um torque externo acima do limite ao ativar ou desativar o controle de conformidade, o robô interromperá o programa devido ao erro JTS (Joint Torque Sensor).
A alteração de rigidez pode ser executada independentemente do tamanho do torque externo.
Durante o controle de conformidade, movimentos conjuntos, como o comando MoveJ, não podem ser executados.
Limite de erro JTS (Nm) | ||||||
Modelo | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
M1013 | 25 | 25 | 25 | 15 | 15 | 15 |
M0617 | 30 | 30 | 30 | 15 | 15 | 15 |
M0609 | 18 | 18 | 15 | 15 | 15 | 15 |
M1509 | 18 | 18 | 15 | 15 | 15 | 15 |
H2515 | 40 | 50 | 40 | 15 | 15 | 15 |
H2017 | 40 | 50 | 40 | 15 | 15 | 15 |
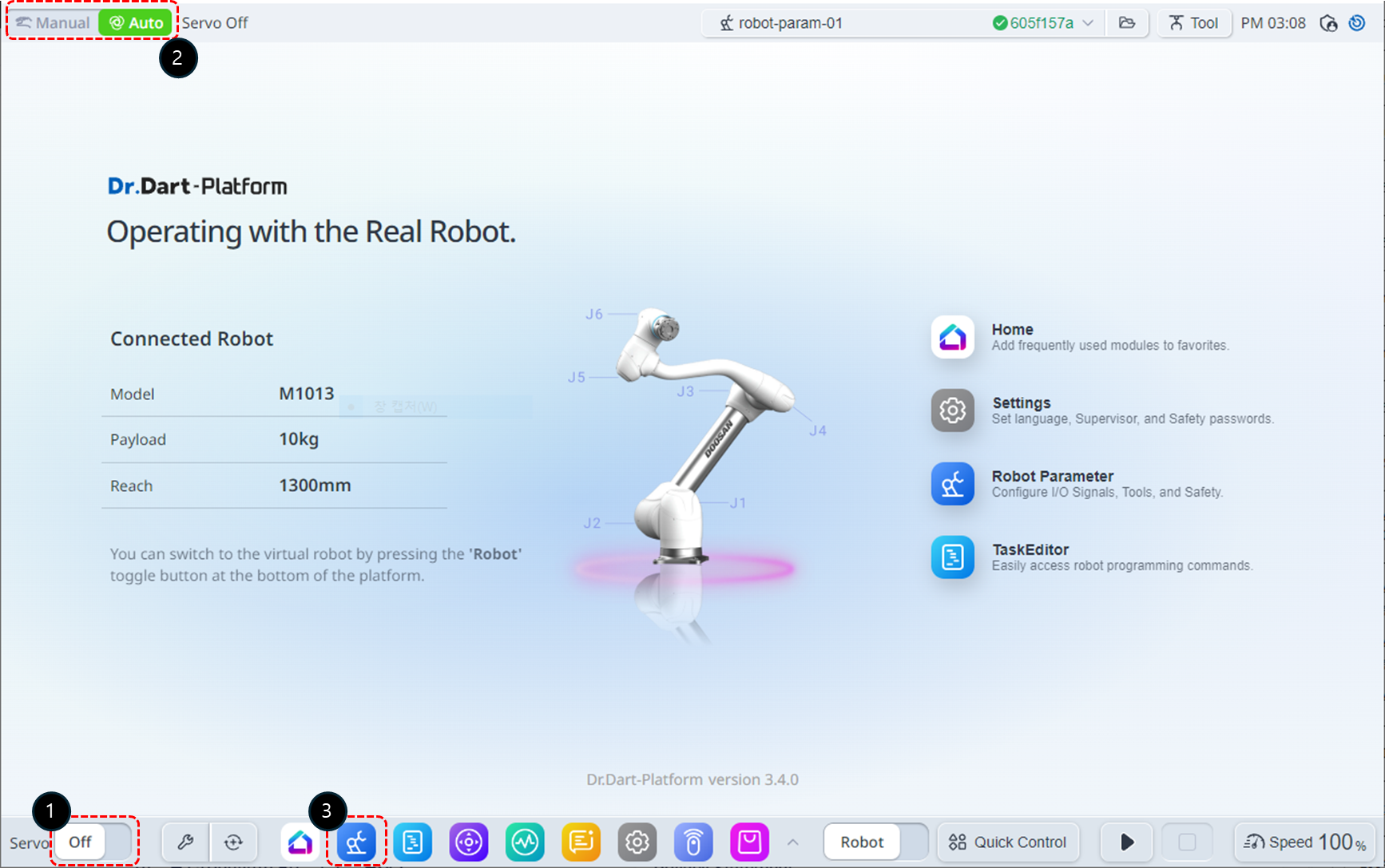
Altere o estado do servo para Ligado.
Altere o modo de operação para Manual.
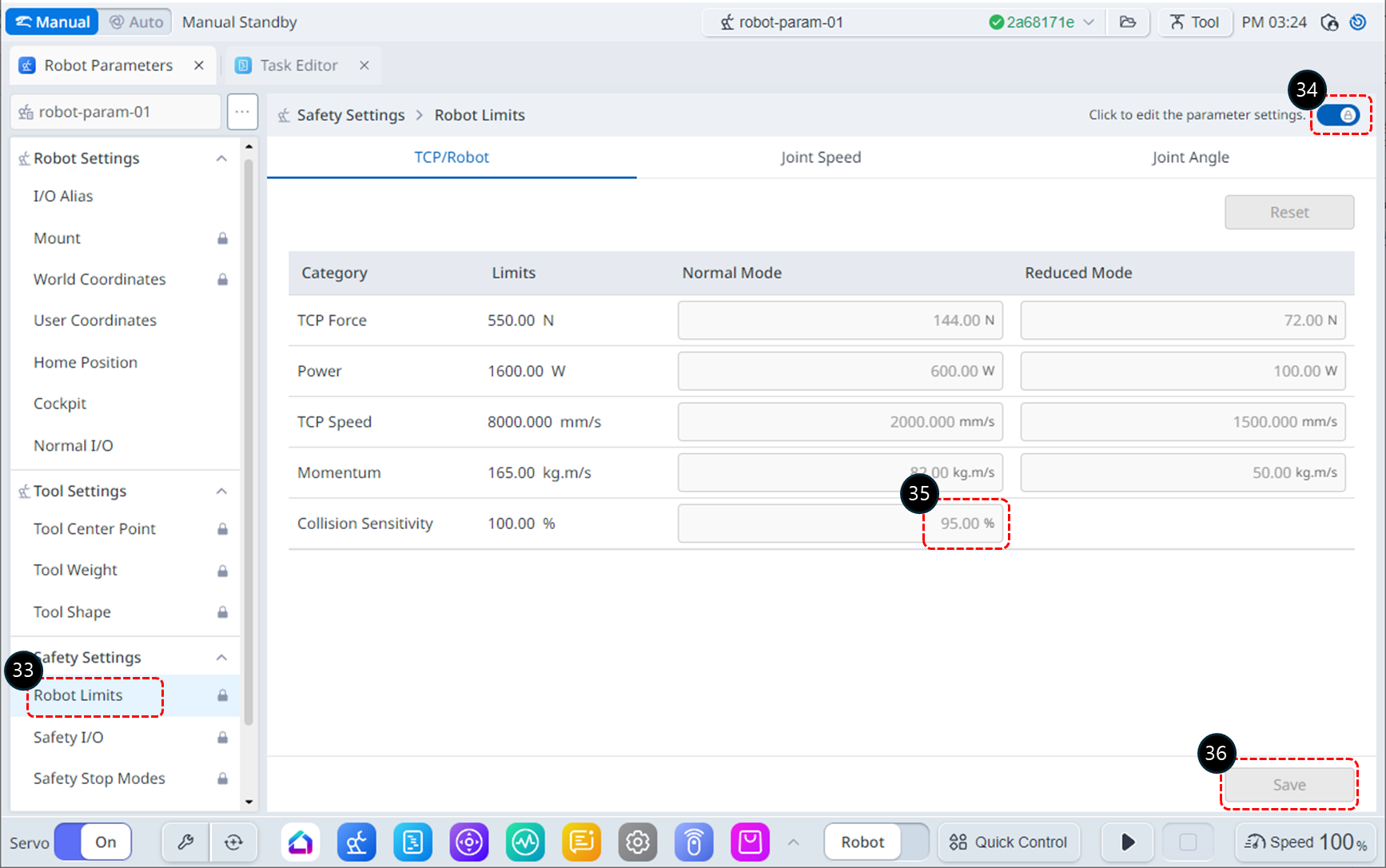
Selecione o módulo Parâmetros do Robô no menu inferior. Neste exemplo, a Sensibilidade de colisão é definida como 95% para explicar o motivo da redução da Sensibilidade de colisão ao usar o controle de conformidade.
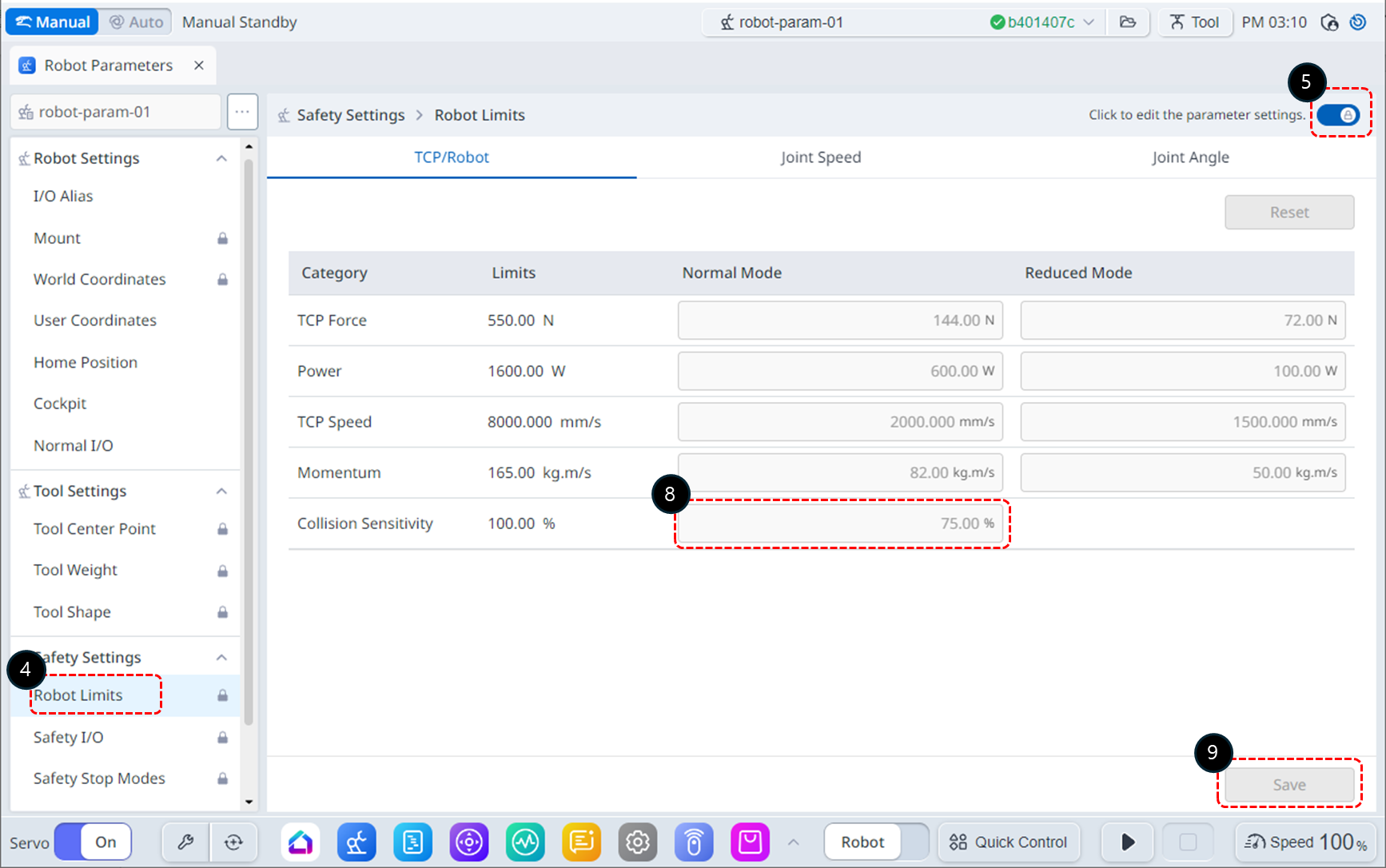
Selecione Limites do robô em Configurações de segurança.
Ative o estado de edição do parâmetro.
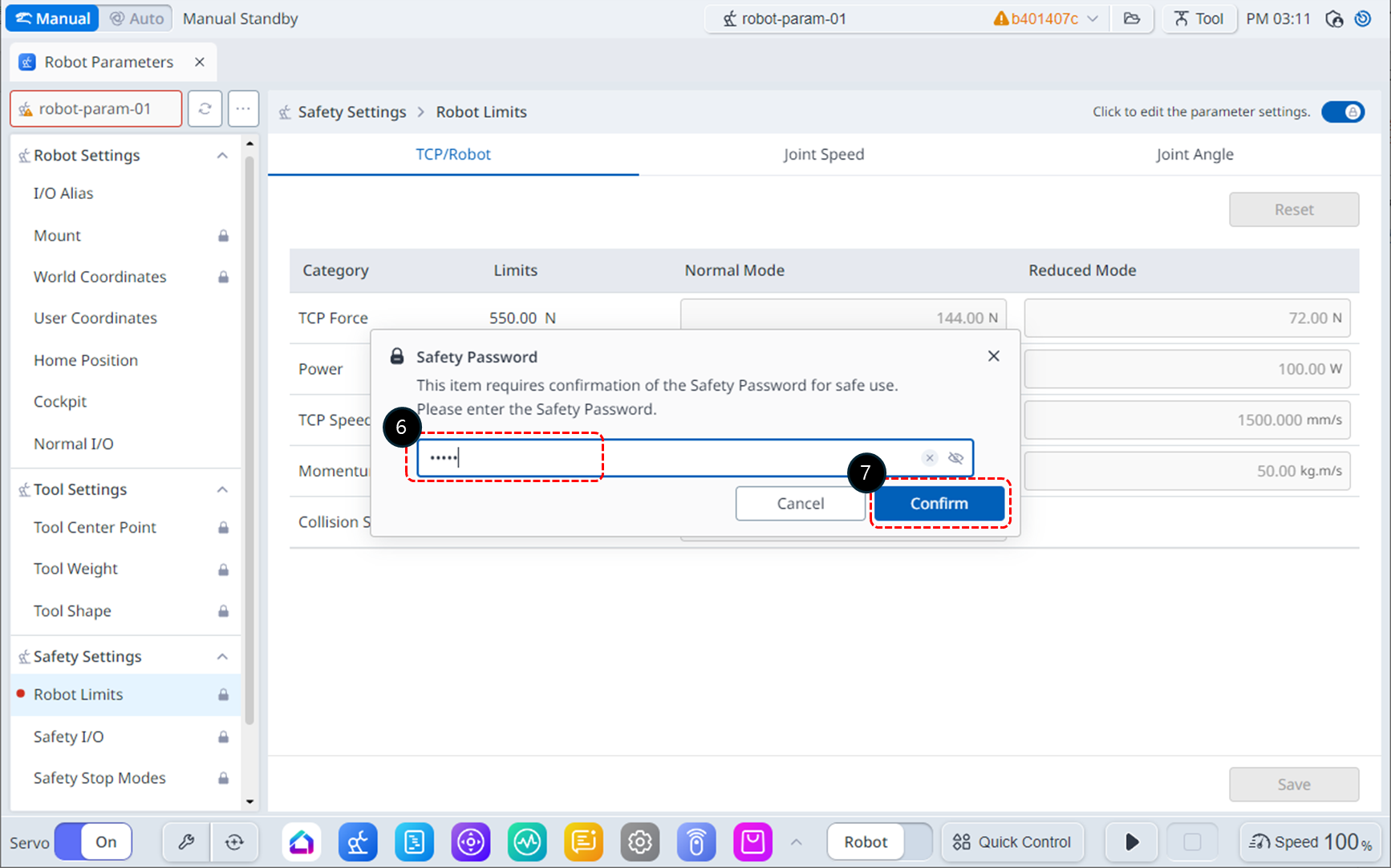
Se uma janela de entrada de senha for exibida, insira a Senha de segurança (senha de segurança padrão: admin).
Clique no botão Confirmar.
Modifique a Sensibilidade de colisão para 95%.
Clique no botão Salvar para salvar as configurações.
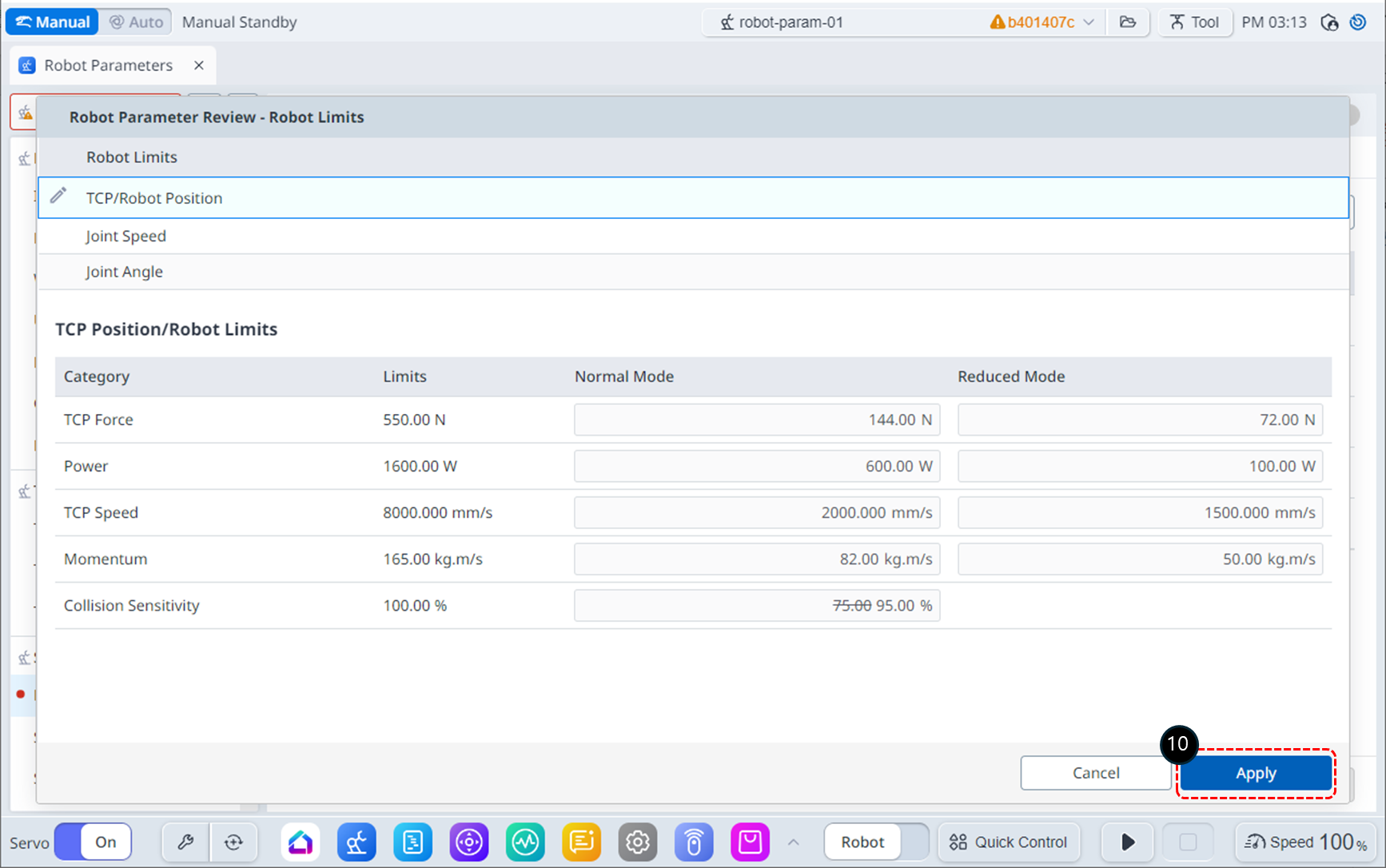
Depois de revisar as alterações, clique no botão Aplicar.
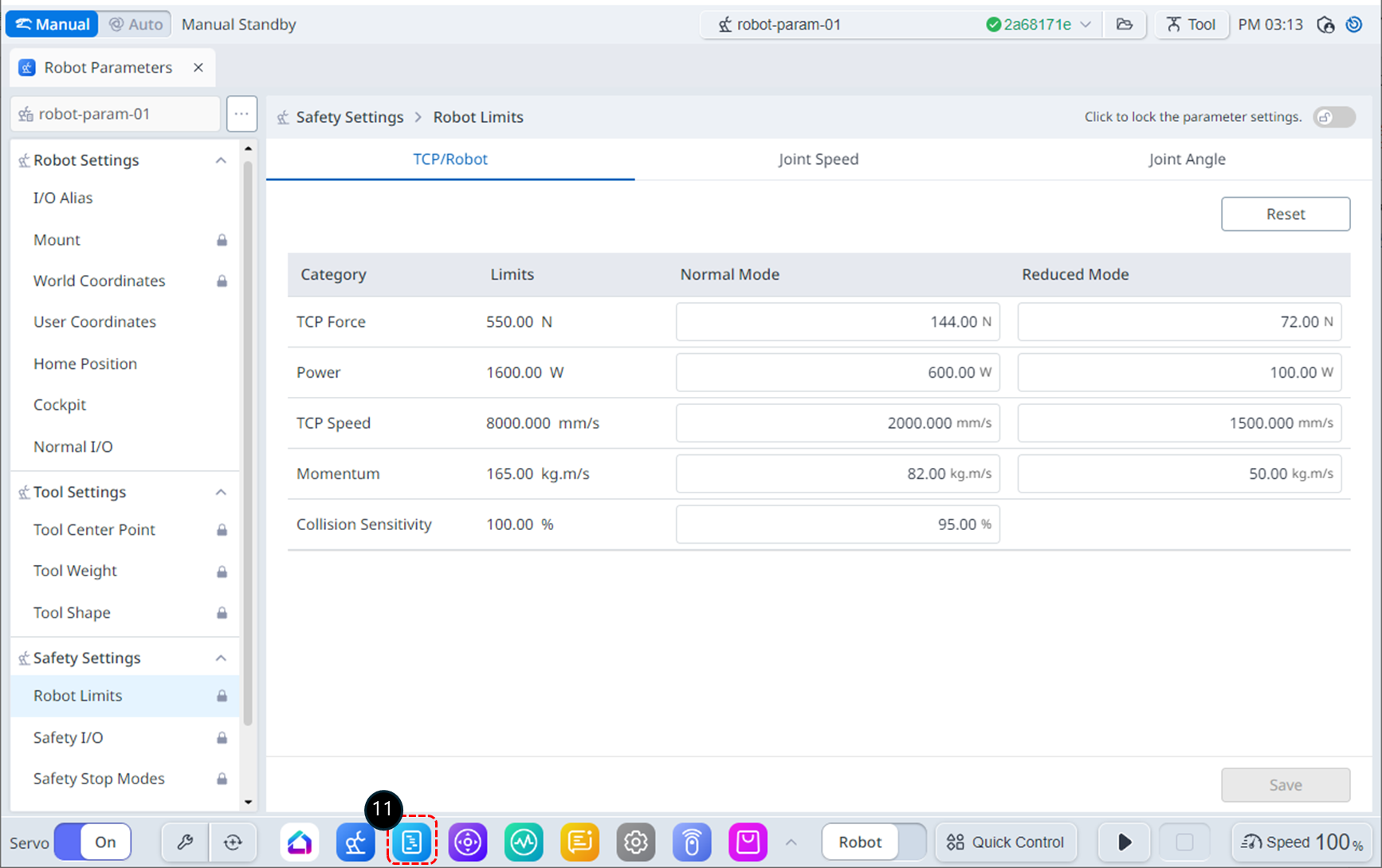
Selecione o módulo Editor de tarefas no menu inferior.
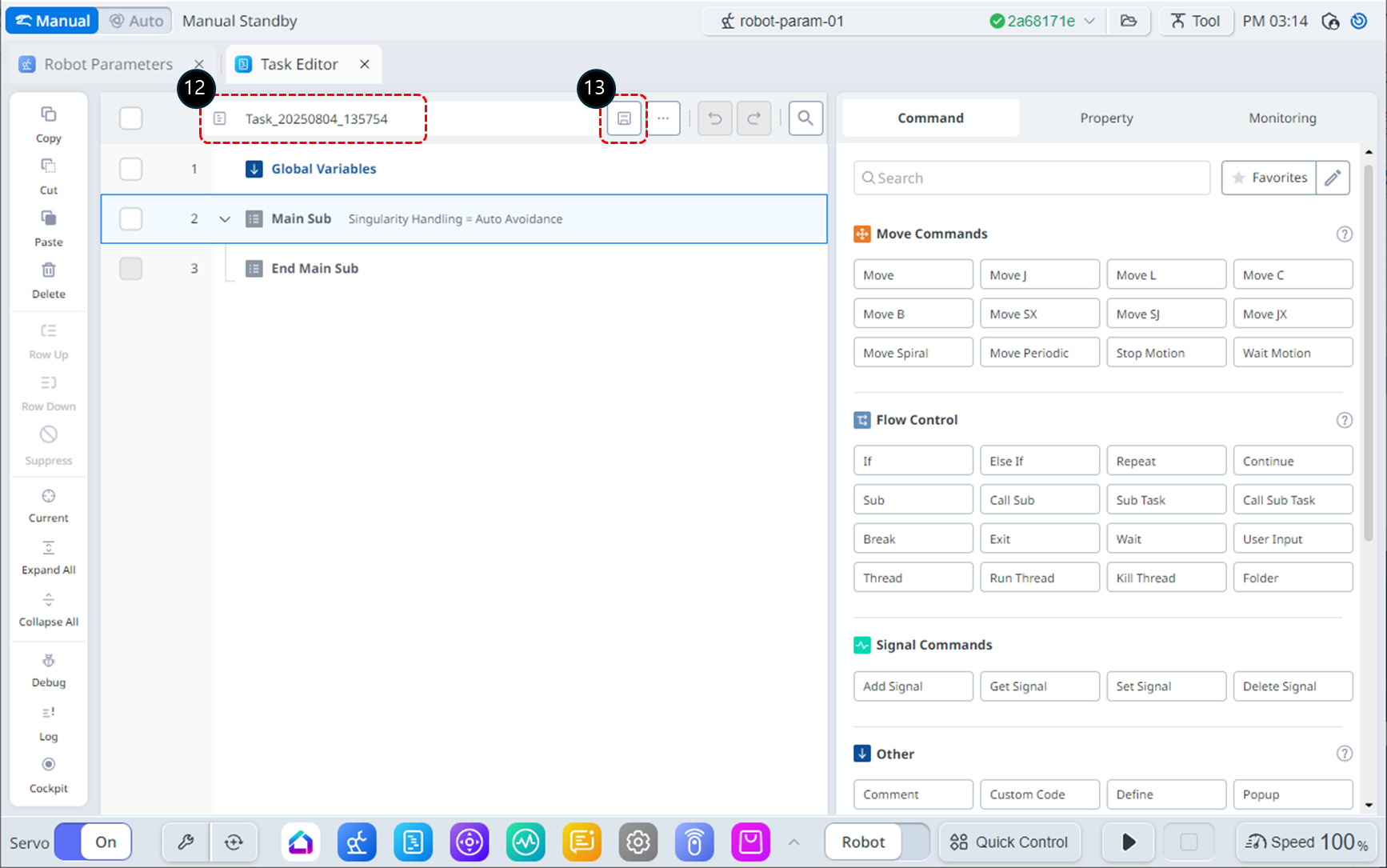
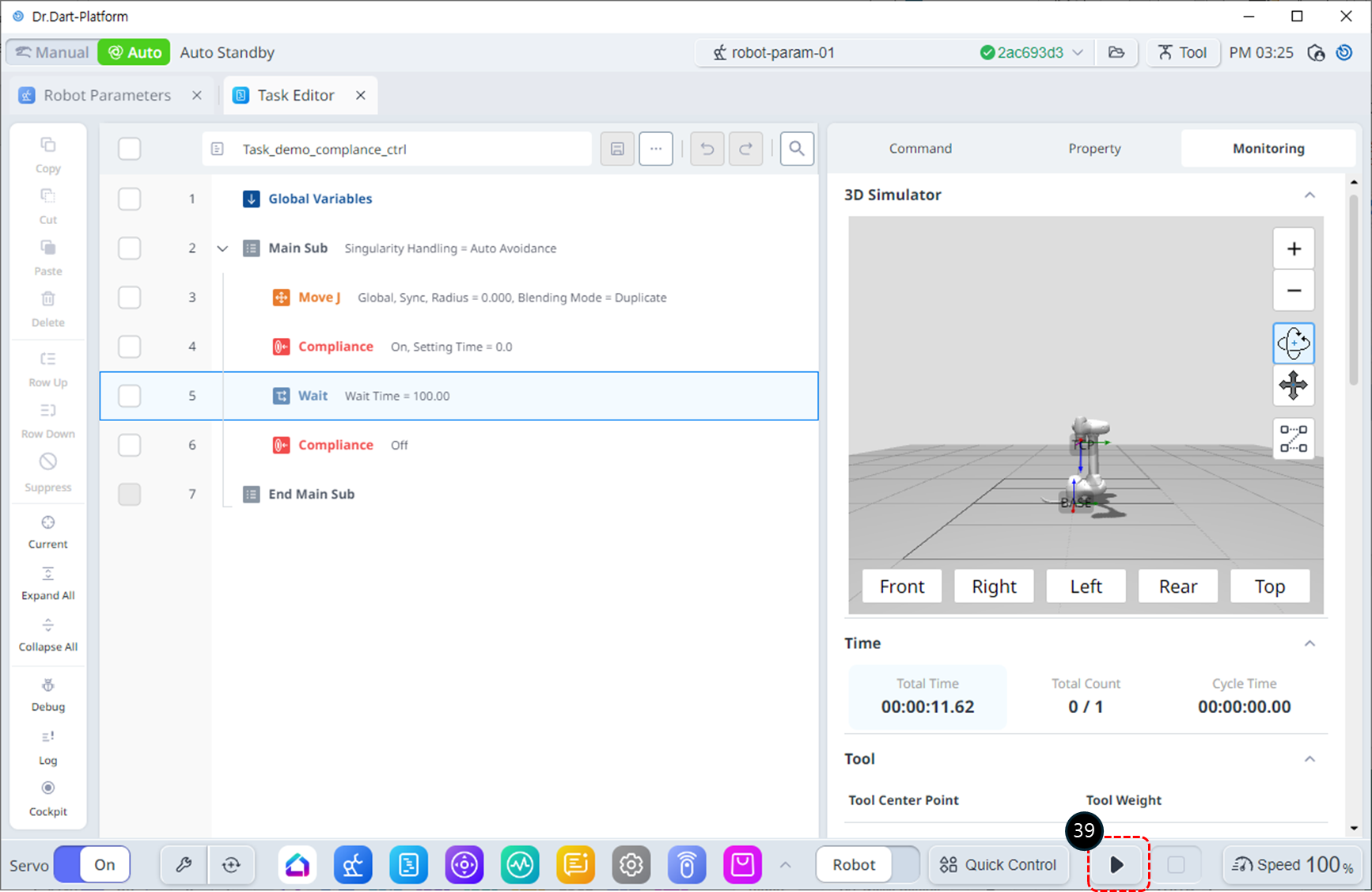
Renomeie a Tarefa para Task_demo_Compliance_ctrl.
Salve o nome da tarefa atualizado.
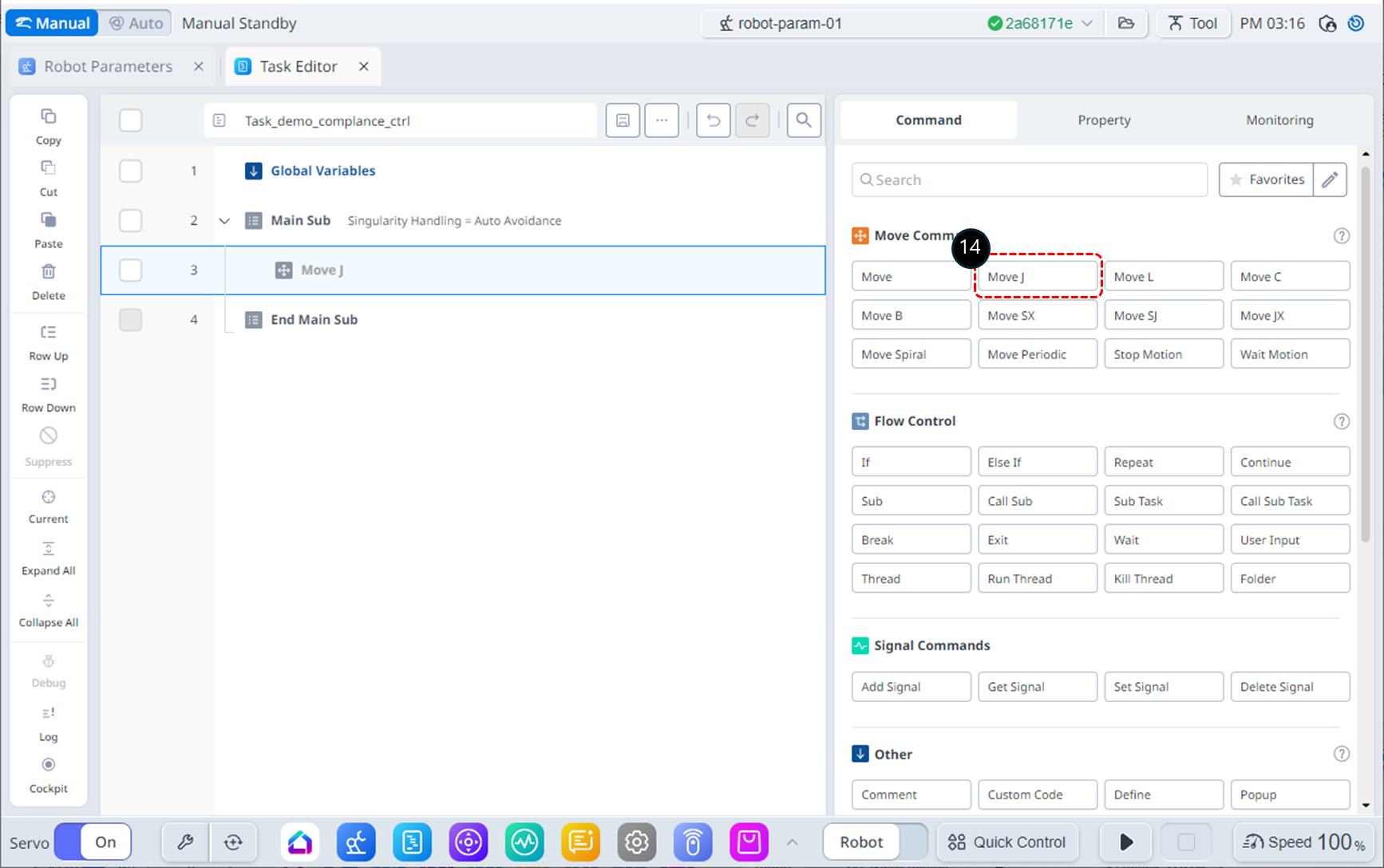
Adicione o comando MoveJ. Este comando será usado para mover o robô para a posição inicial para controle de conformidade.
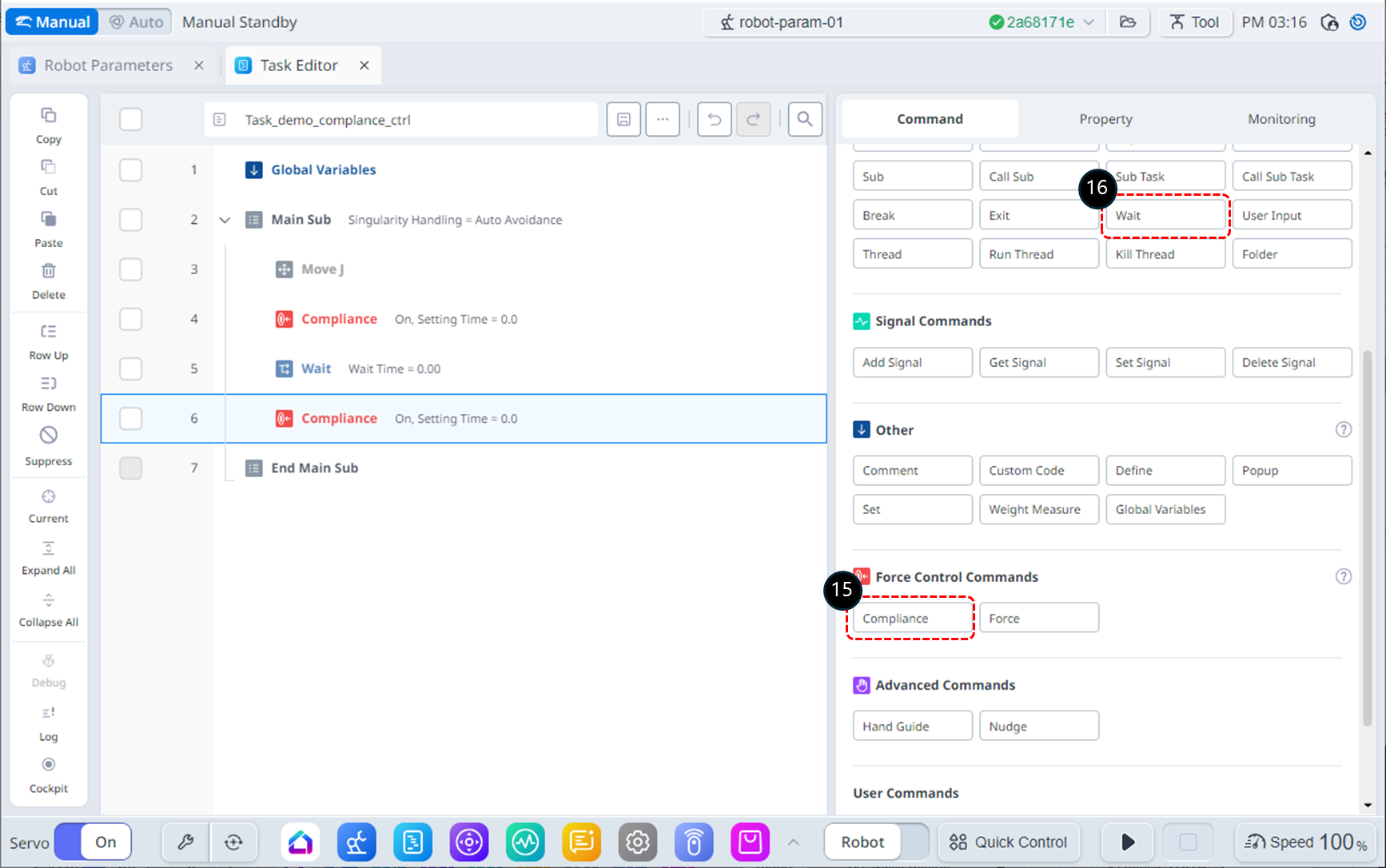
Adicione dois comandos de conformidade. Esses comandos serão usados para ativar e desativar o controle de conformidade.
Insira um comando de espera entre os comandos de conformidade. Este comando de espera será usado para manter o controle de conformidade.
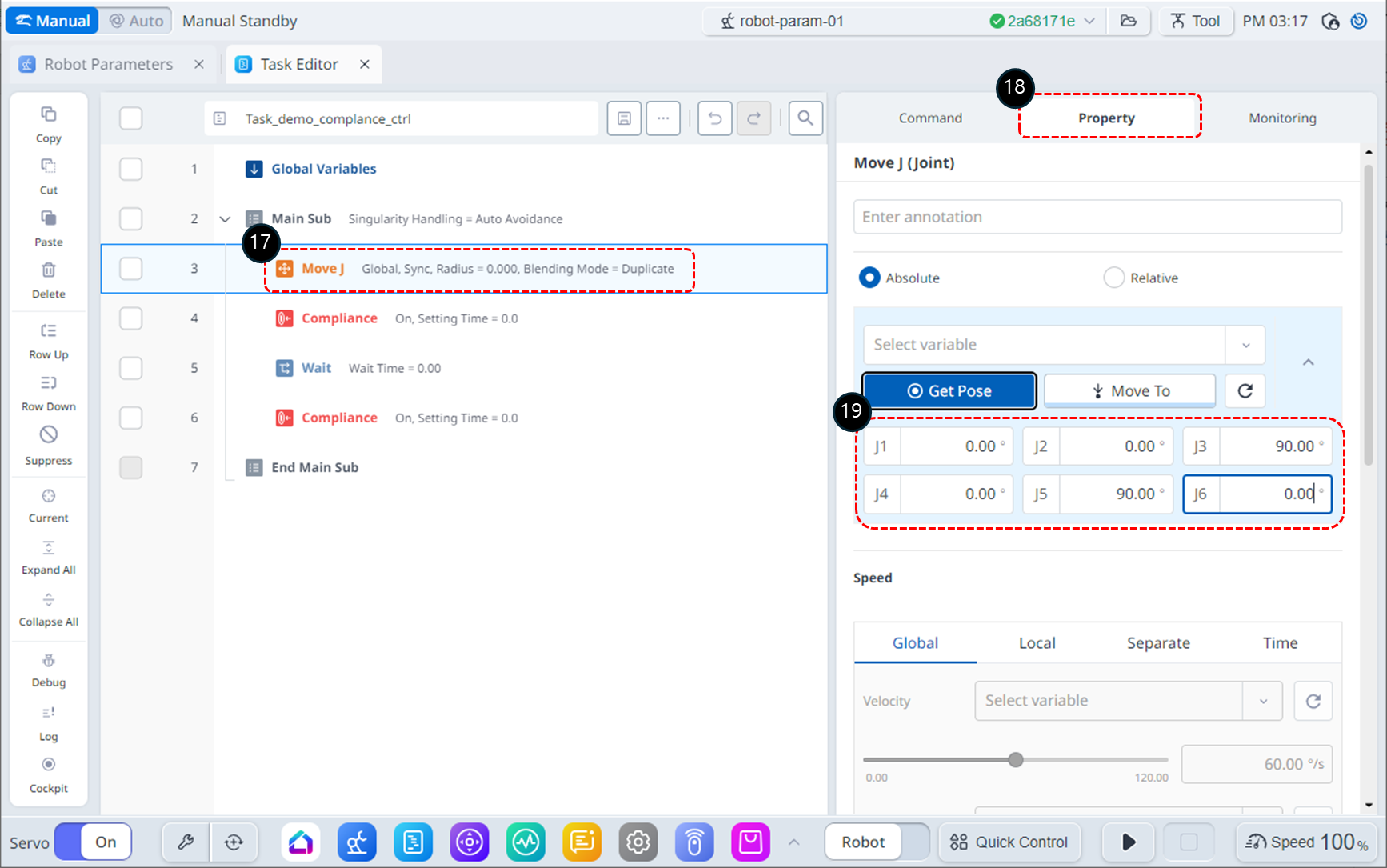
Selecione o comando MoveJ na linha 3.
Escolha a guia Propriedade.
Modifique a posição alvo do MoveJ para (0, 0, 90, 0, 90, 0) graus Dependendo do espaço de instalação do robô, o ângulo do J1 pode ser ajustado, se necessário.
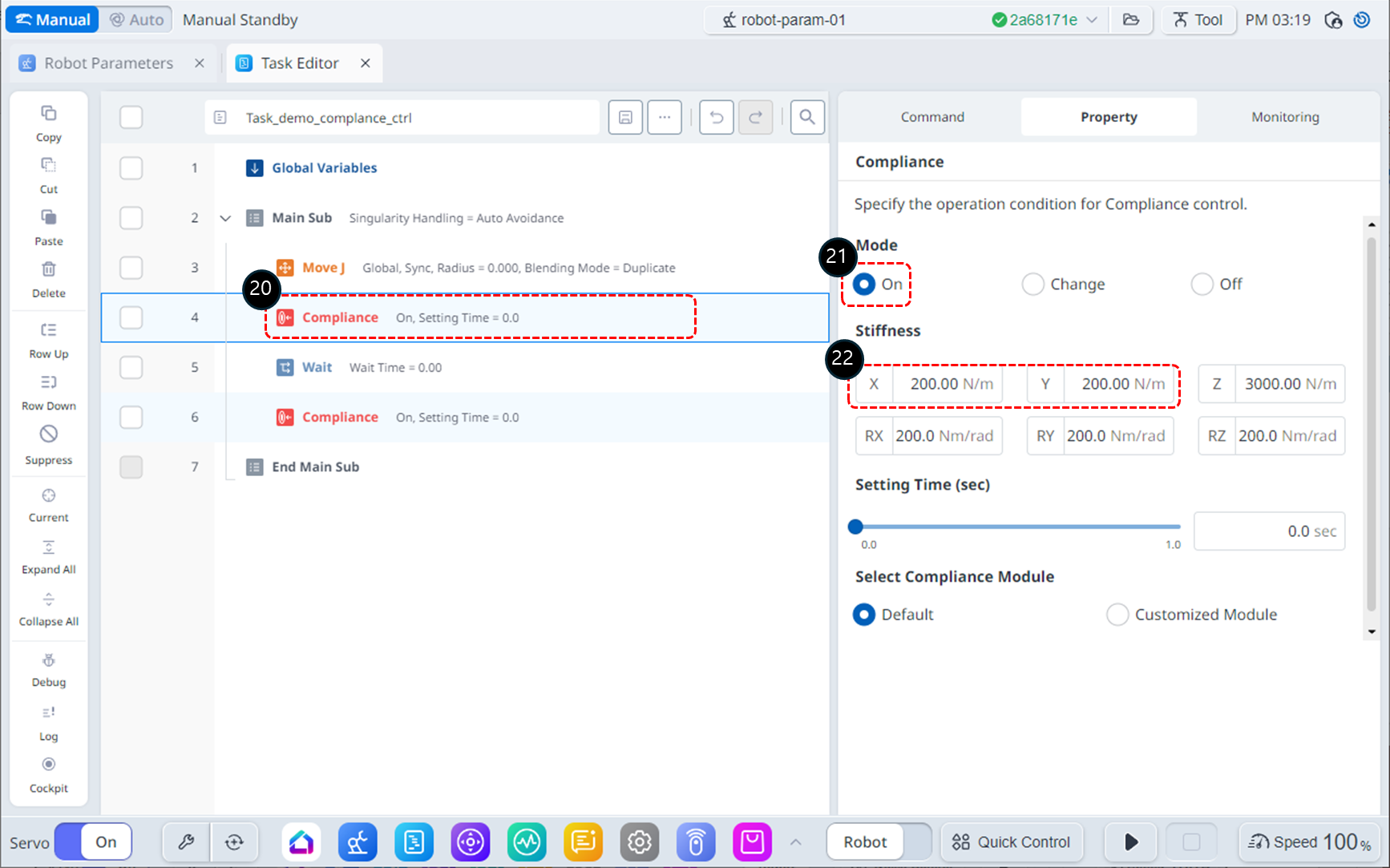
Selecione o comando de conformidade na linha 4.
Na guia Propriedade, defina o Modo da seguinte forma: O modo Ativado ativa o controle de conformidade.
Modo : Ligado
Defina a rigidez da seguinte forma: Reduza a rigidez nas direções X e Y para fazer com que o robô responda mais suavemente nessas direções.
X : 200 N/m.
Y : 200 N/m.
Z : 3000 N/m (padrão)
RX, Ry, Rz : 200 Nm/rad (padrão)
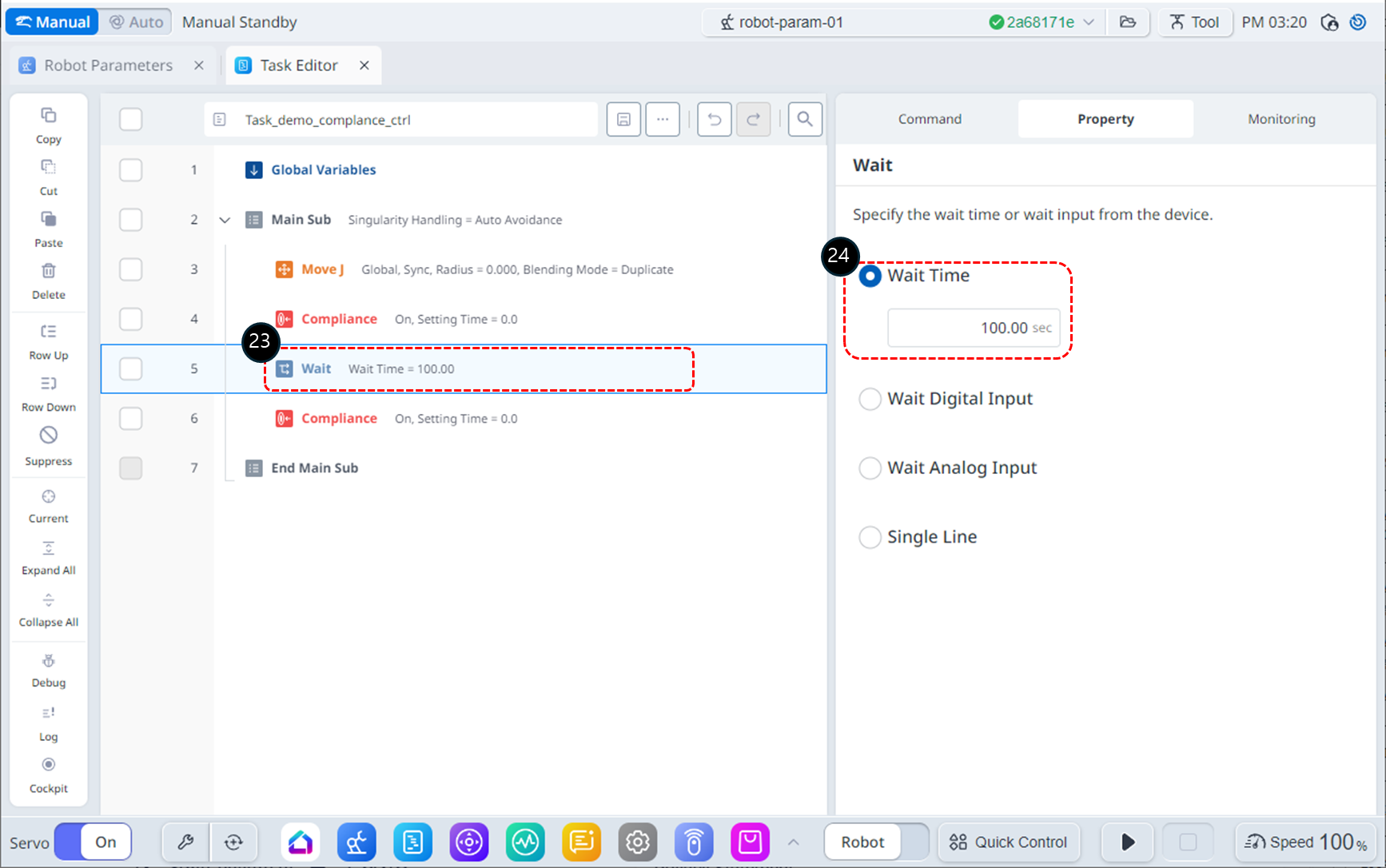
Selecione o comando Aguardar na linha 5.
Defina o tempo de espera da seguinte forma.
Tempo de espera : 100 seg
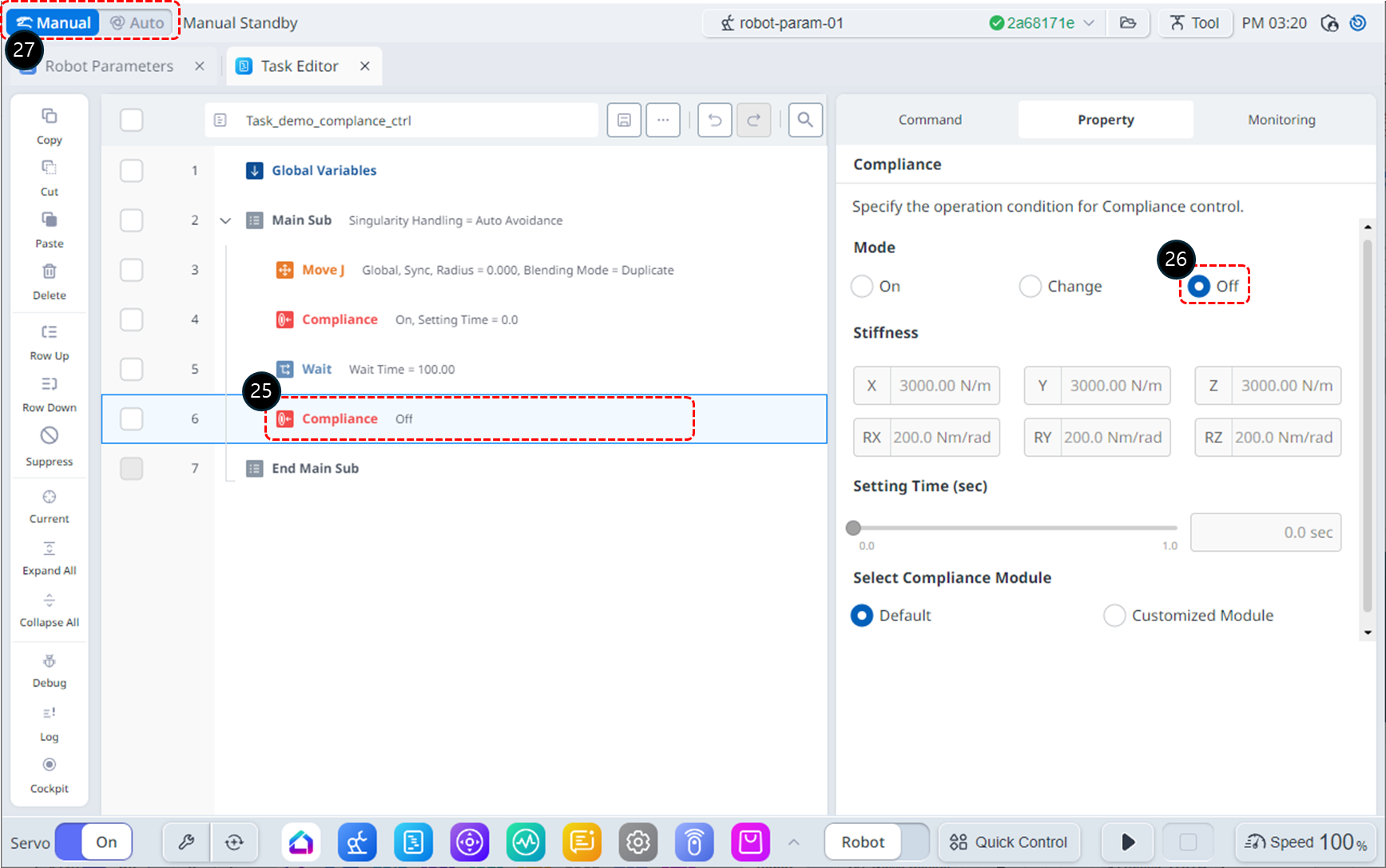
Selecione o comando de conformidade na linha 6.
Na guia Propriedade, defina o Modo da seguinte forma: O modo desativado desativa o controle de conformidade.
Modo : Desligado
Altere o modo de operação para Automático. A guia Propriedade mudará automaticamente para a guia Monitoramento.
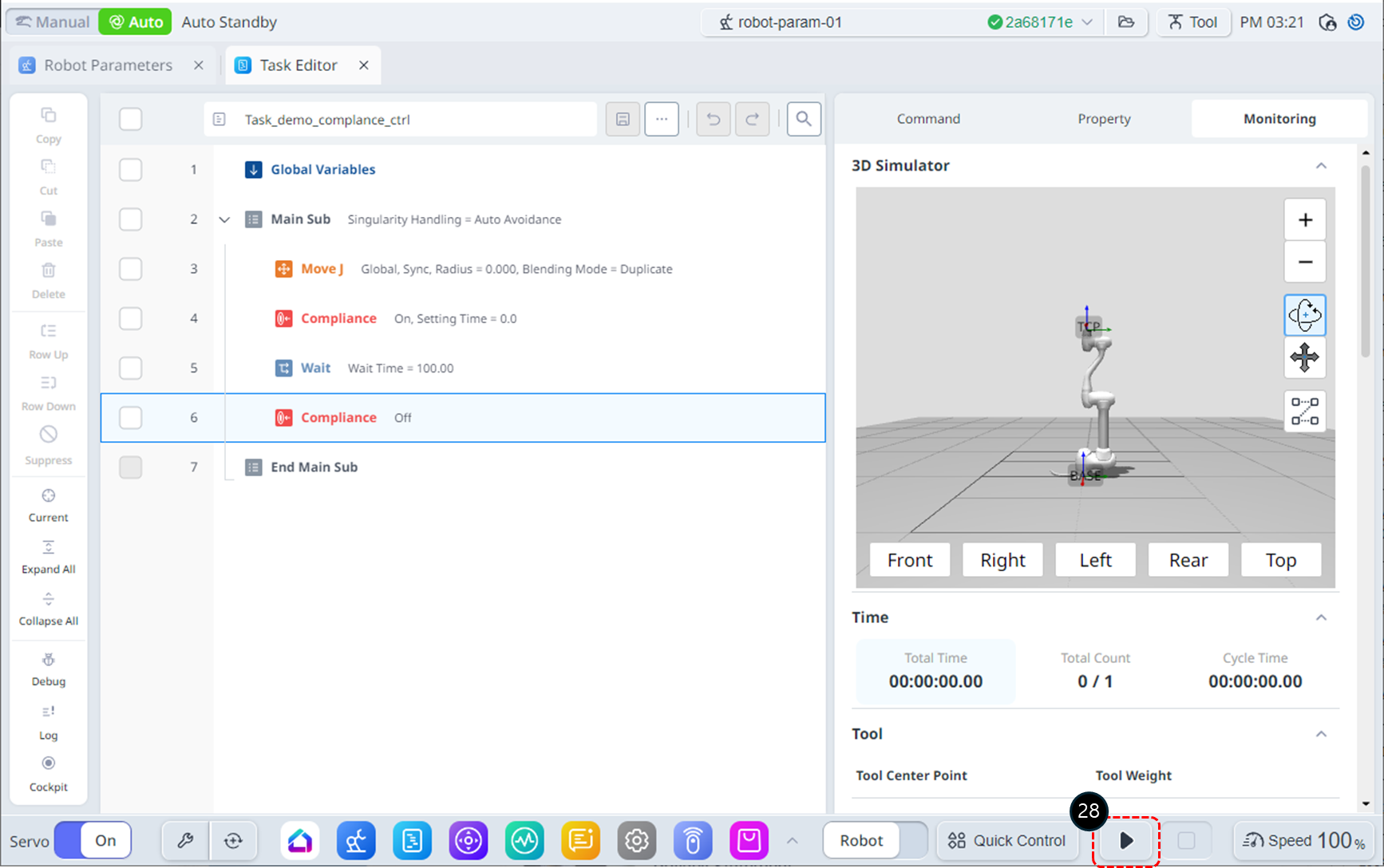
Clique no botão Executar. O robô se moverá para a posição inicial, iniciará o controle de conformidade e permanecerá parado por 100 segundos. Durante esse tempo, empurre suavemente o atuador da extremidade do robô em direção ao corpo do robô. O robô parará com um erro de colisão (ou erro de limite de força TCP). No estado de parada de segurança causado pela colisão, o LED do robô exibirá uma cor amarela.
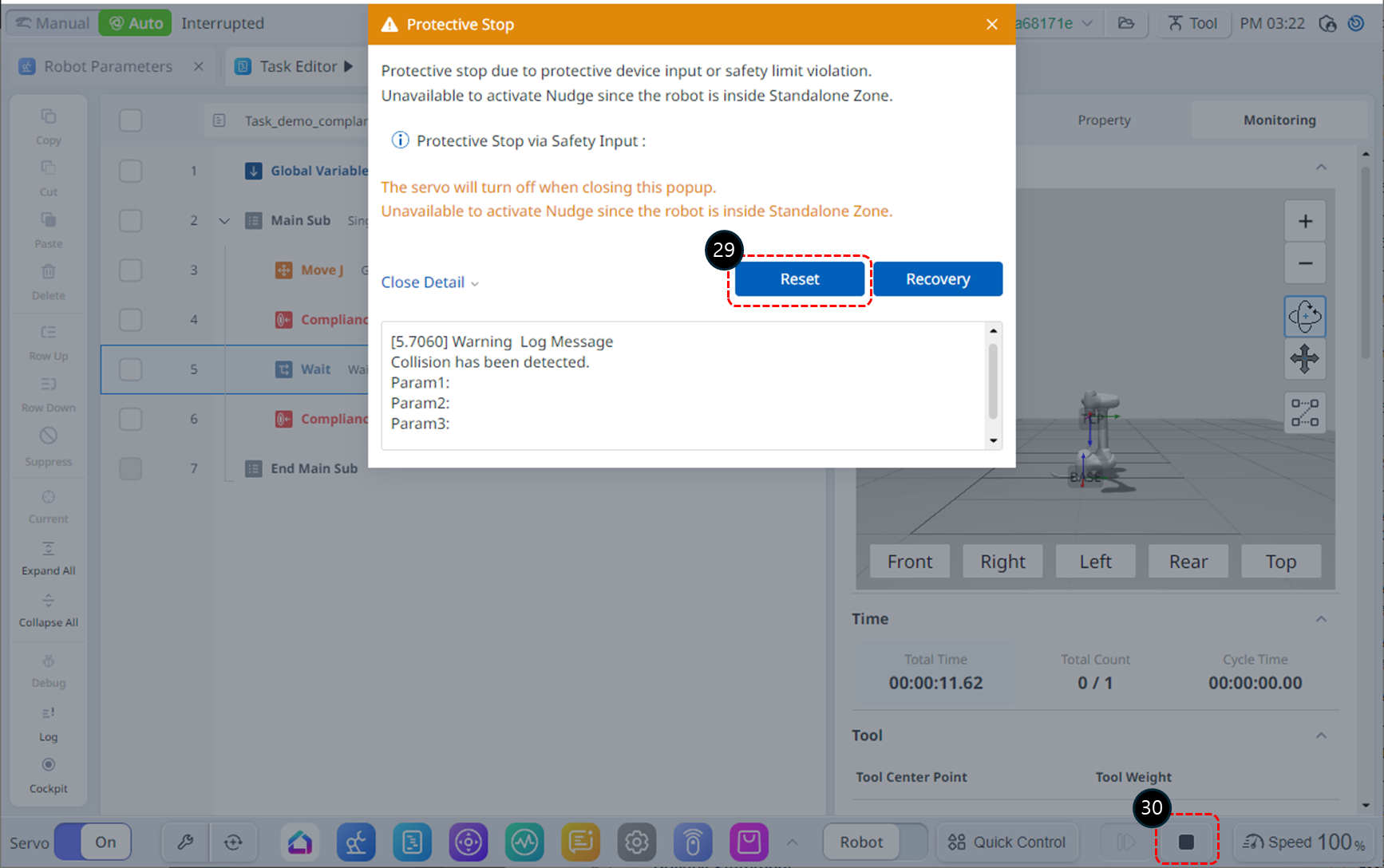
Clique no botão Reset (Redefinir) na janela de aviso de parada de segurança. O programa de tarefas retomará a operação.
Clique no botão Parar para encerrar o programa.
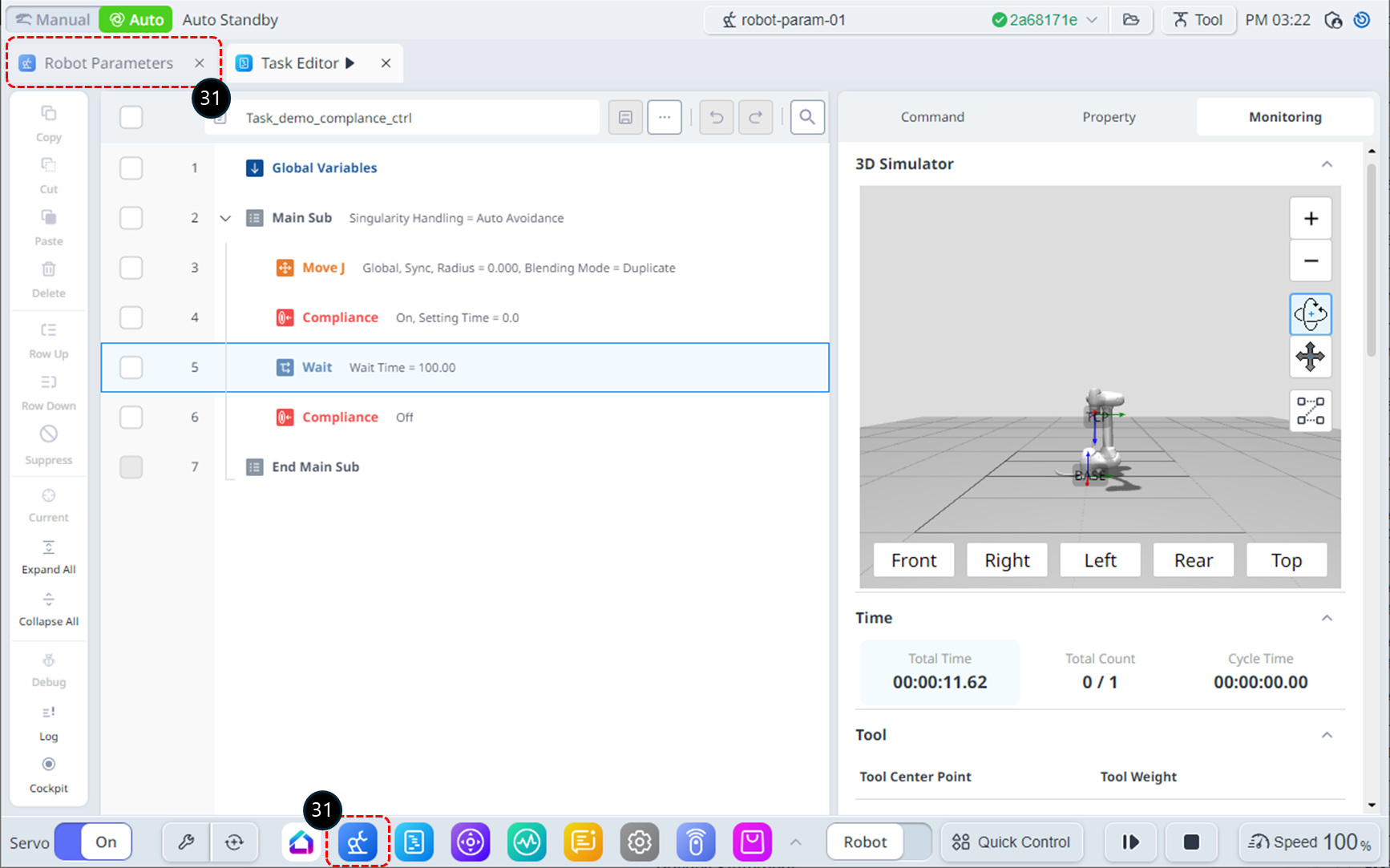
Para resolver problemas de colisão, a Sensibilidade de colisão nas configurações de segurança deve ser reduzida. (Se houver um problema de limite de força TCP, o parâmetro Força TCP deve ser aumentado.) Selecione o módulo Parâmetros do Robô no menu inferior. Como alternativa, você pode selecionar a guia do módulo Parâmetros do robô no canto superior esquerdo, que funciona da mesma forma.
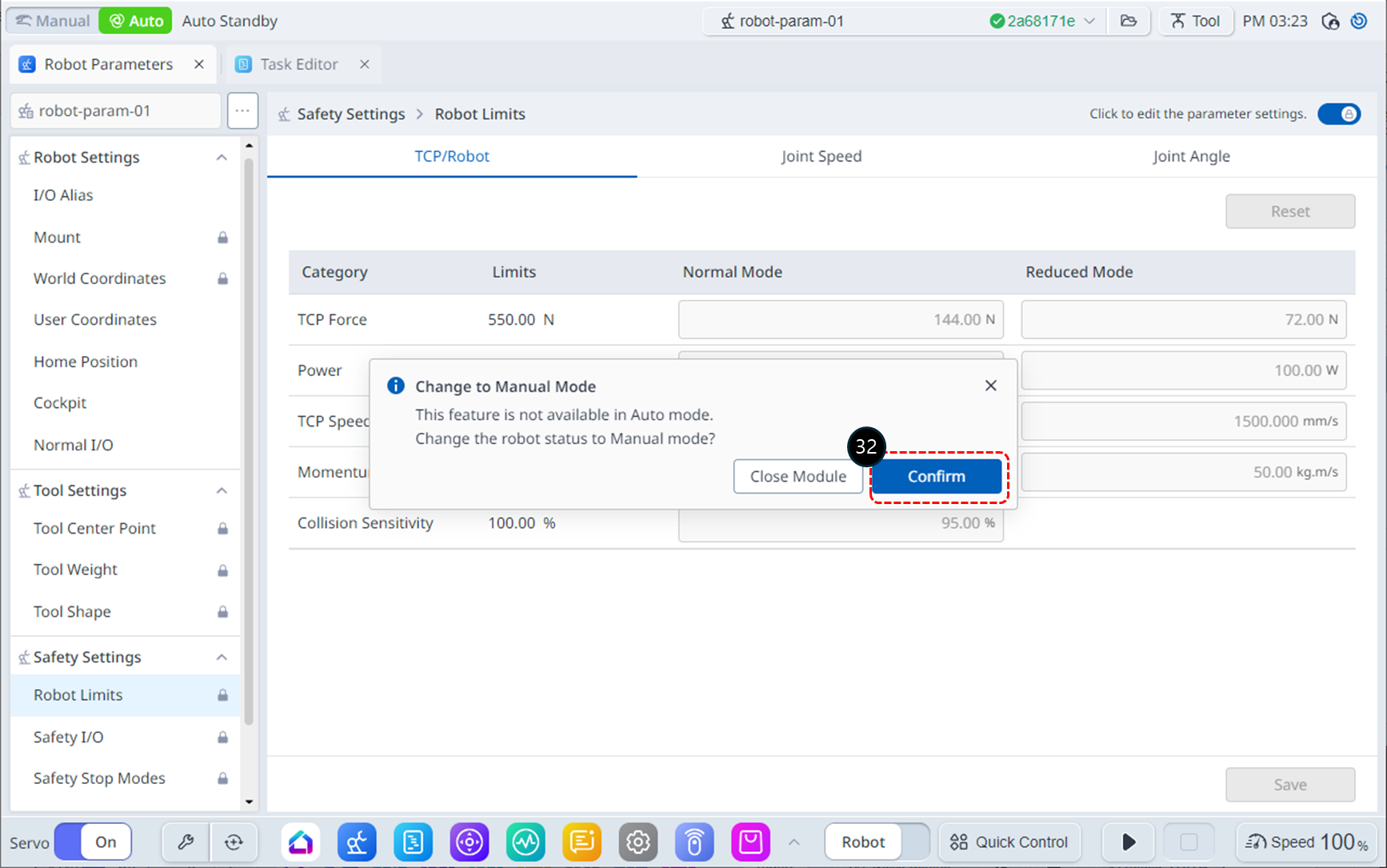
No modo Automático, acessar o módulo Parâmetros do Robô acionará uma janela de notificação. Clique no botão Confirmar para alternar para o modo Manual.
Selecione Limites do robô em Configurações de segurança.
Ative o estado de edição do parâmetro. Se uma janela de entrada de senha for exibida, consulte as etapas 6 a 7.
Modifique a Sensibilidade de colisão para 50%.
Clique no botão Salvar para salvar as configurações. Se a janela Robot Parameters Review (Revisão de parâmetros do robô) for exibida, revise as modificações e clique no botão Apply (Aplicar).
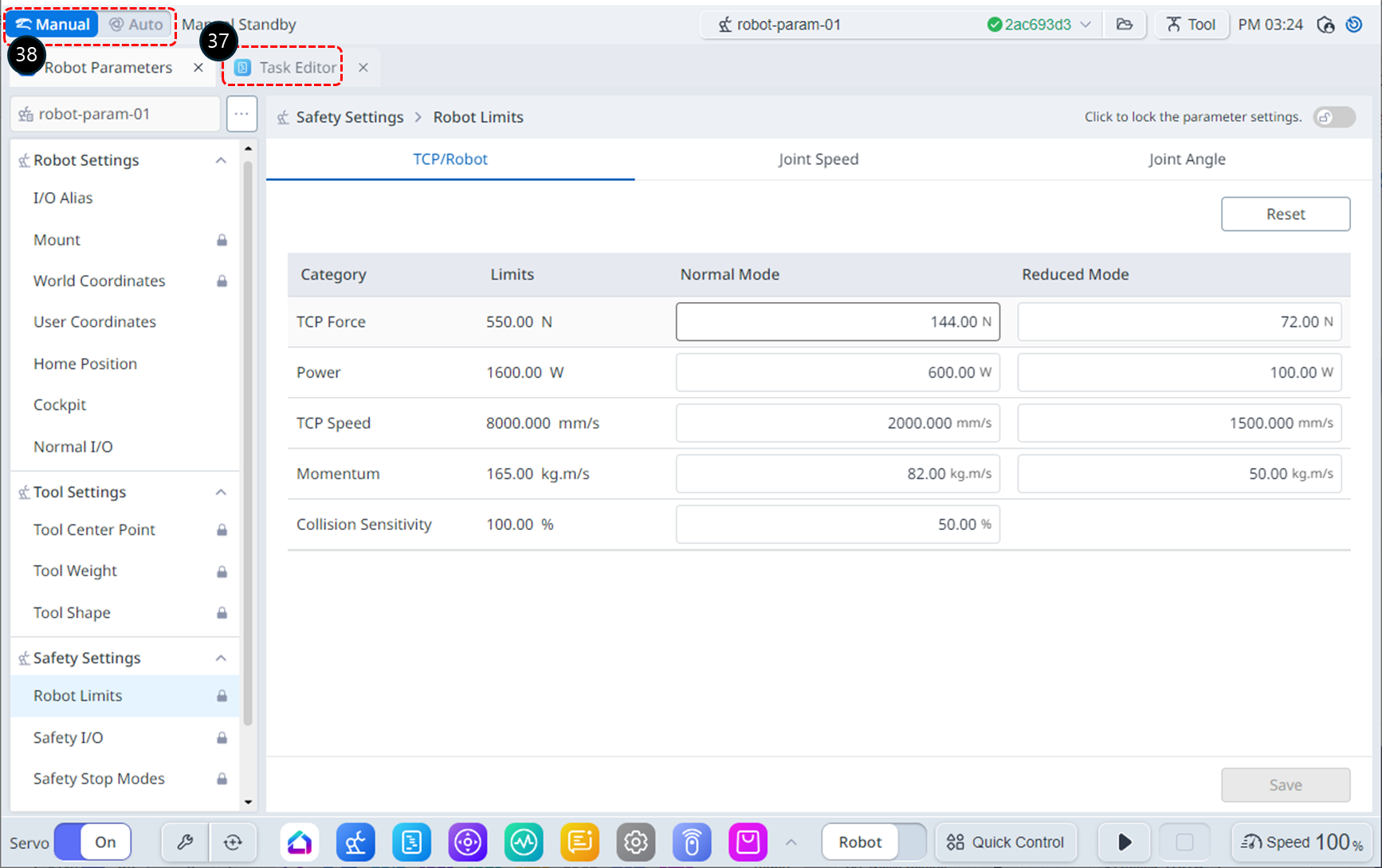
Selecione a guia do módulo Editor de tarefas.
Alterne para o modo Automático para executar o Programa de tarefas.
Clique no botão Executar. Durante o tempo de espera, empurre suavemente o atuador final do robô em direção ao corpo do robô. O robô se moverá devido à força de empurrar e, uma vez que você soltar a mão, ele retornará à sua posição original.