
Limite de espaço e configurações de zonas
Comum
A área efetiva pode ser selecionada como Interior/Exterior.
O Tipo de forma pode ser selecionado como Esfera, Cilindro, Cubóide, Cubóide inclinado ou Caixa multiplanar. Para obter mais informações, consulte Visão geral das configurações de limite de espaço e zona.
Configuração de limite de espaço
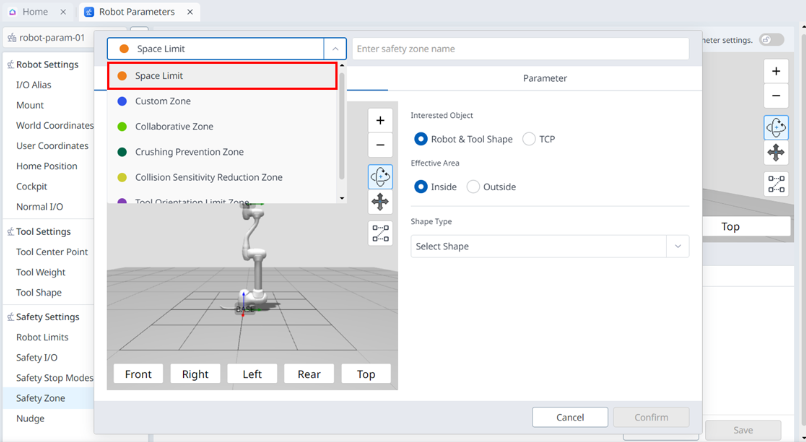
Limite de espaço é uma função que define uma cerca virtual na área mais externa do robô. Você pode operar o robô sem definir um limite de espaço, mas é recomendável definir um limite de espaço para uso seguro.
Você pode configurá-lo selecionando "Limite de espaço" em Parâmetros do robô > Zona de segurança > Adicionar > na parte superior esquerda da janela pop-up.
Você pode selecionar uma das formas/TCP do Robô e da ferramenta para o objeto interessado.
O robô deve estar dentro da área limite de espaço definida para ser definida normalmente.
Observação
Dependendo de como você a definiu, o valor padrão de Expansão de espaço existe.
Configuração da forma da ferramenta, ao selecionar 'TCP' para inspeção, valor de margem TCP 0 mm
Configuração da forma da ferramenta, ao selecionar "Robô e forma da ferramenta" para inspeção, valor da margem TCP 0 mm
Formato da ferramenta não definido, ao selecionar 'TCP' para inspeção, valor de margem TCP 0 mm
Formato da ferramenta não definido, ao selecionar "Forma do robô e da ferramenta" para inspeção, valor da margem TCP 60mm
Configuração da zona personalizada
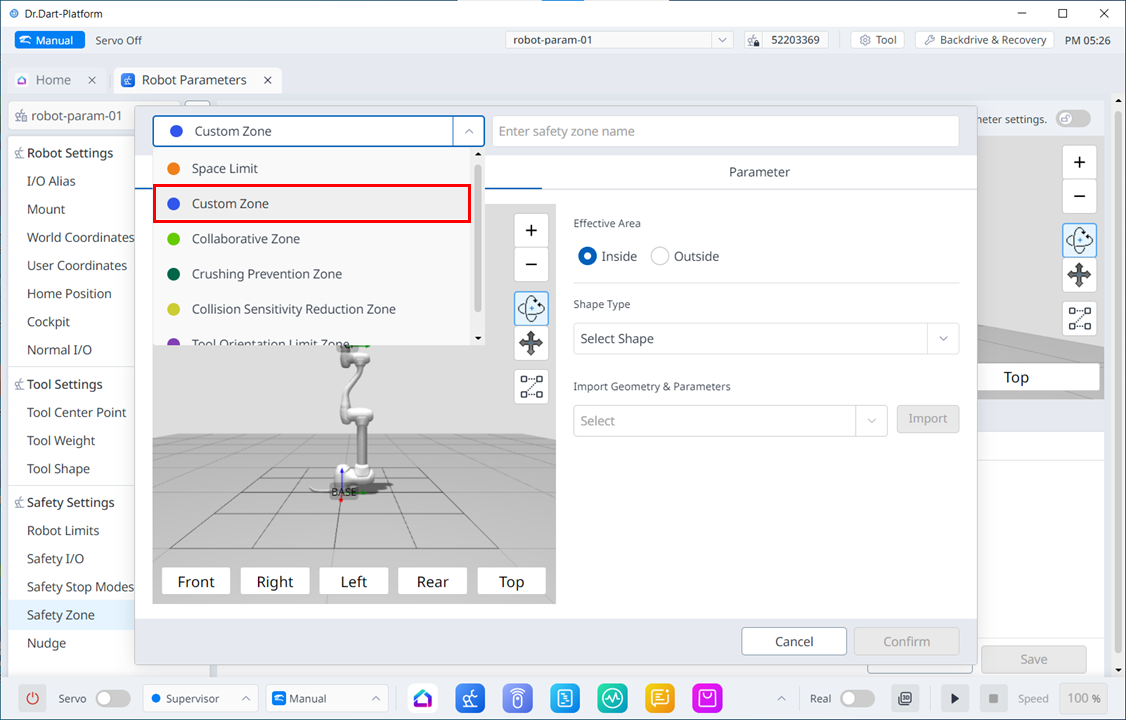
Zona personalizada é a zona de segurança mais flexível onde você pode definir livremente os parâmetros de segurança. Você pode definir todas as configurações, como limites do robô, modo de parada segura, velocidade da junta e limites de ângulo para atender às suas necessidades.
Você pode configurá-lo selecionando "Zona personalizada" em Parâmetros do robô > Zona de segurança > Adicionar > pop-up superior esquerdo.
Observação
Se o TCP estiver em uma posição em que várias áreas se sobrepõem, as regras a seguir se aplicam individualmente para cada recurso de segurança.
Modo normal
Se nenhuma zona estiver definida como zonas de alta prioridade, o valor limite de segurança mais restrito das zonas sobrepostas será o valor de referência de inspeção.
Se houver uma zona definida como zona de alta prioridade, o valor limite dessa zona será o valor de referência de inspeção.
Se houver mais de duas zonas definidas como zonas de alta prioridade, o valor limite de segurança mais relaxado das zonas será o critério de inspeção.
Modo Reduzir
Se nenhuma zona estiver definida como zonas de alta prioridade, o valor limite de segurança mais restrito das zonas sobrepostas será o valor de referência de inspeção.
Se houver uma zona definida para uma zona de alta prioridade, a opção de substituição dessa zona determinará o valor de referência de inspeção.
Se a opção de cancelamento não estiver marcada, o valor do limite de segurança mais limitado entre a zona de prioridade alta e o limite global reduzido será o valor de referência da inspeção.
Se a opção de substituição estiver marcada, a zona de prioridade alta será o valor de referência de verificação.
Se houver mais de uma zona definida para uma zona de alta prioridade, a opção de substituição dessa zona determinará o valor de referência de inspeção.
Se a opção de substituição não estiver marcada para nenhuma das zonas de prioridade alta, a zona de prioridade mais alta para a qual a opção de substituição não está marcada e o valor de limite de segurança mais limitado do Limite global reduzido será o valor de referência da inspeção.
Se a opção de substituição para todas as zonas de alta prioridade estiver marcada, o valor limite de segurança mais relaxado entre as zonas de alta prioridade será o critério de inspeção.
Configurar a Zona colaborativa
A Zona colaborativa é uma zona projetada para trabalhar com segurança com robôs. Ele fornece limites do robô, como taxas de desaceleração necessárias para trabalho de curto alcance e configurações do modo de parada segura.
Você pode configurá-lo selecionando "Zona colaborativa" em Parâmetros do robô > Zona de segurança > Adicionar > canto superior esquerdo do pop-up.
Configuração da zona de prevenção de esmagamento
A Zona de Prevenção de Esmagamento é uma zona para evitar riscos de esmagamento que podem ocorrer entre o robô e outros objetos. Nessa zona, quando o limite de colisão e força externa é violado, o modo de parada de segurança é fixado em RS1 (Reflex Stop) e a sensibilidade de colisão é definida como 100%, de modo que, quando uma colisão é detectada, o robô reage com a maior sensibilidade possível à força externa e, em seguida, para com segurança por meio da reação flutuante.
Você pode configurá-lo selecionando "Zona de prevenção de esmagamento" em Parâmetros do robô > Zona de segurança > Adicionar > canto superior esquerdo do pop-up.
Configuração da zona de redução da sensibilidade de colisão
A Zona de Redução da Sensibilidade de Colisão é uma zona que ajusta a sensibilidade de detecção de colisão do robô ao trabalhar com diferentes materiais ou superfícies. Ele fornece configurações de sensibilidade à força e colisão.
Você pode defini-la selecionando "Zona de redução da sensibilidade de colisão" em Parâmetros do robô > Zona de segurança > Adicionar > canto superior esquerdo da janela pop-up.
Configurar a Zona de limite de orientação da ferramenta
A Zona limite de orientação da ferramenta é uma zona que limita a orientação do TCP. Ele garante que o TCP esteja voltado para uma direção específica e impede que ele fique voltado para uma direção não segura definindo a direção e a margem do ângulo.
Você pode defini-la selecionando "Tool Orientation Limit Zone" (Zona limite de orientação da ferramenta) em Robot Parameters > Safe Zone > Add > Top Left (Parâmetros do robô > Zona segura > Adicionar > canto superior esquerdo da janela pop-up.