
Especificações do robô
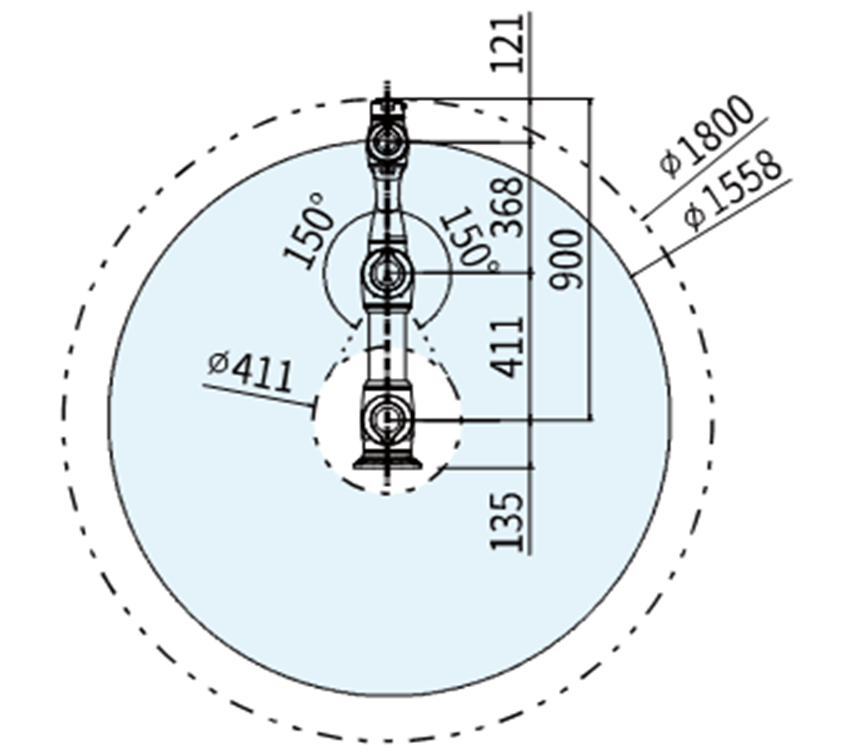
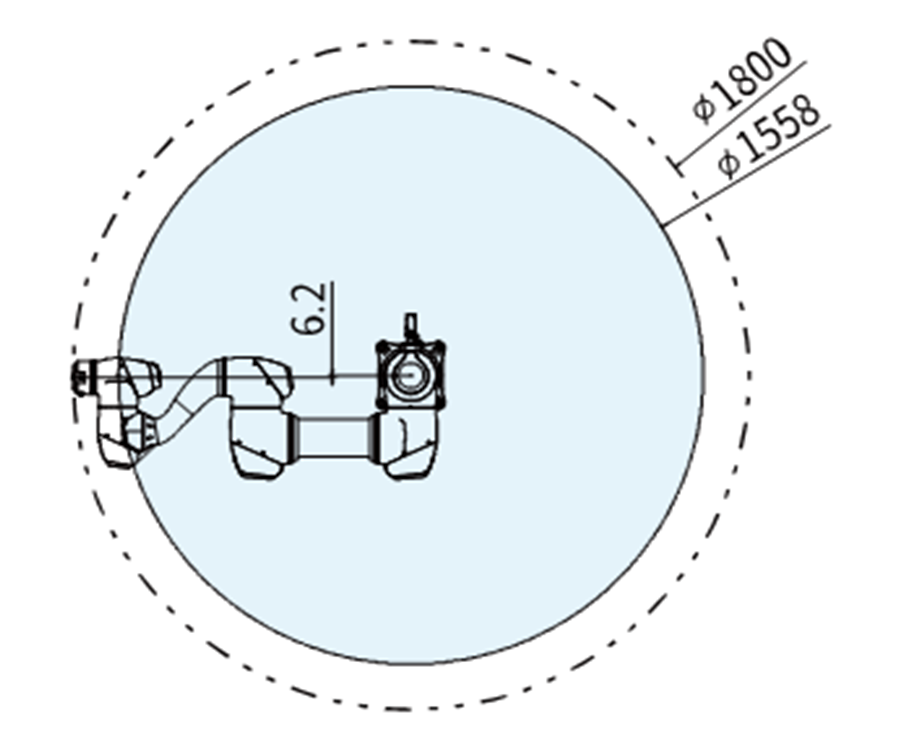
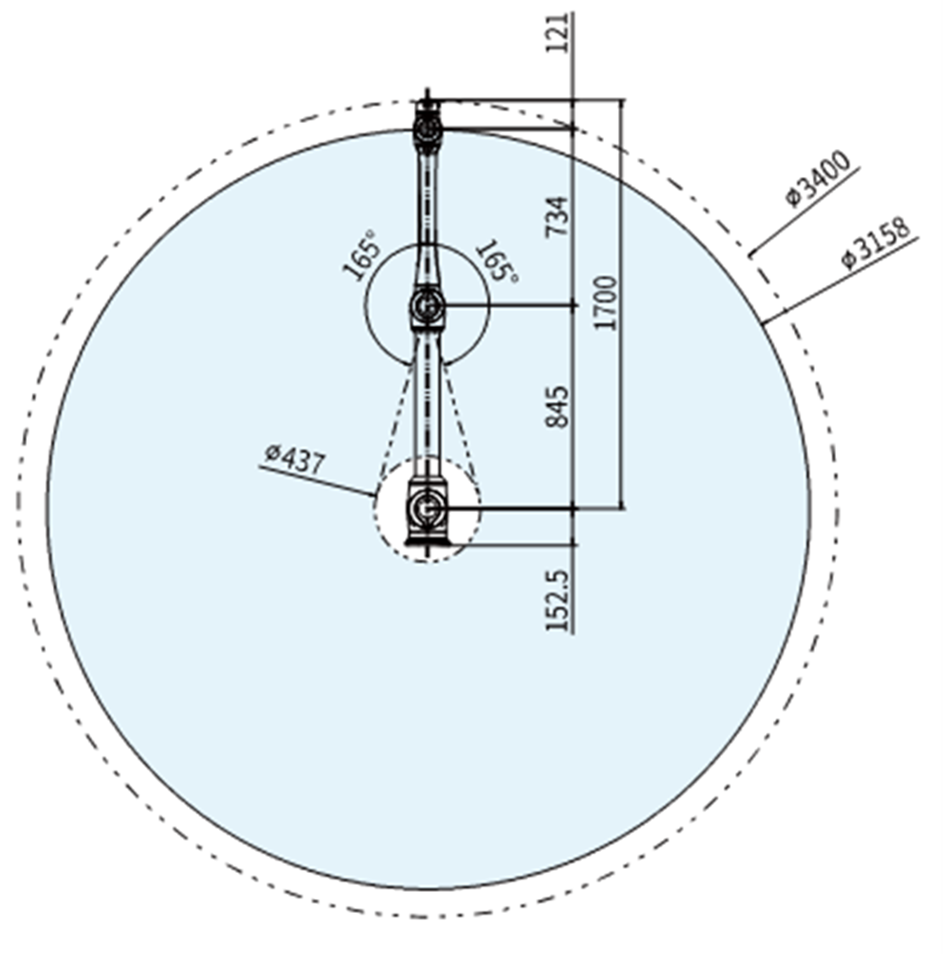
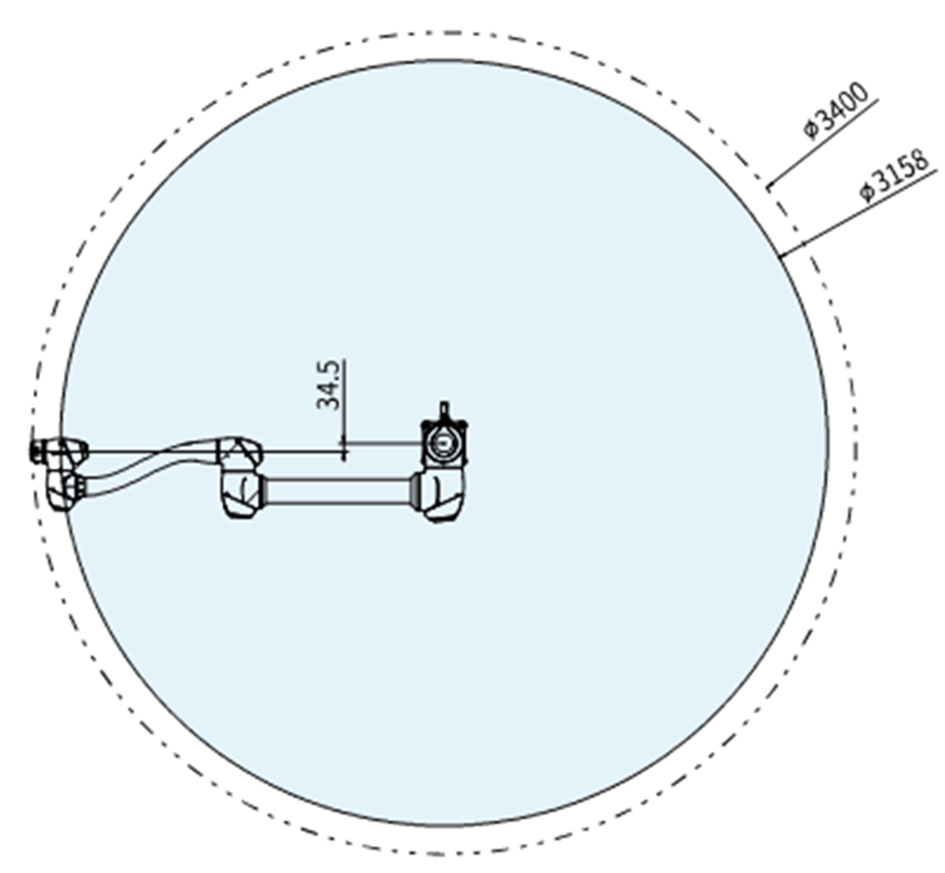
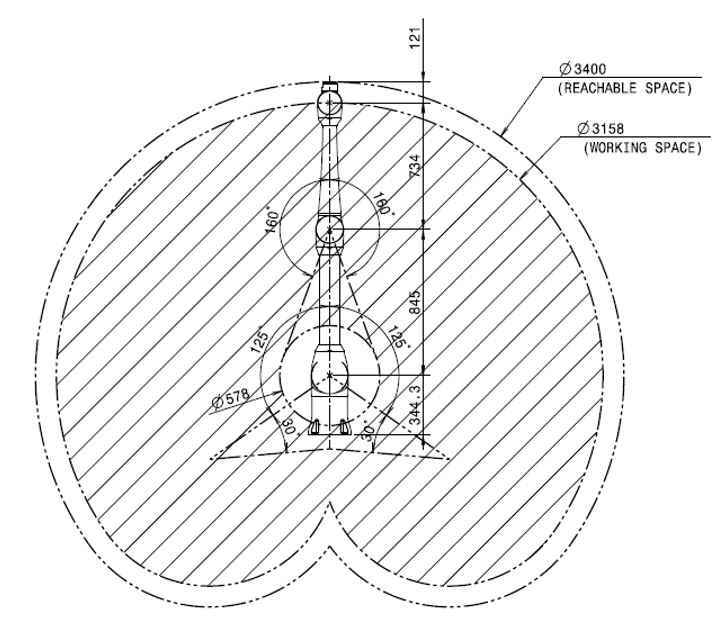
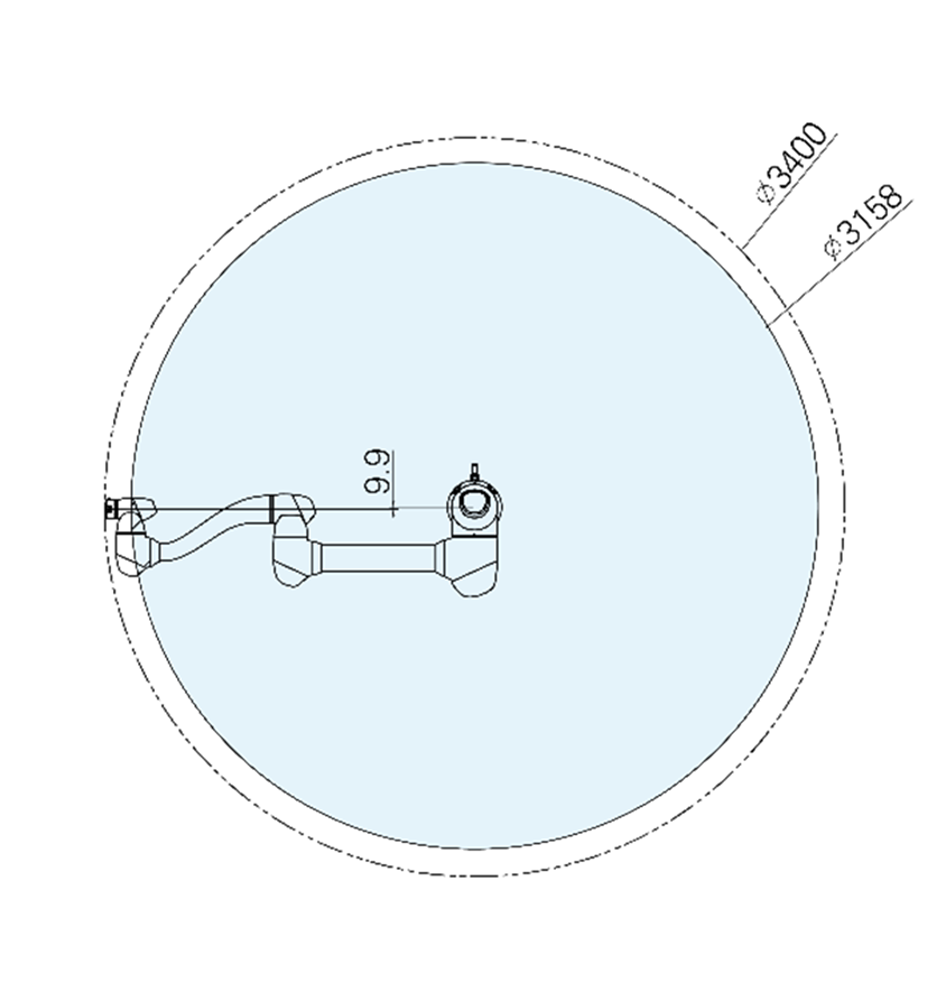
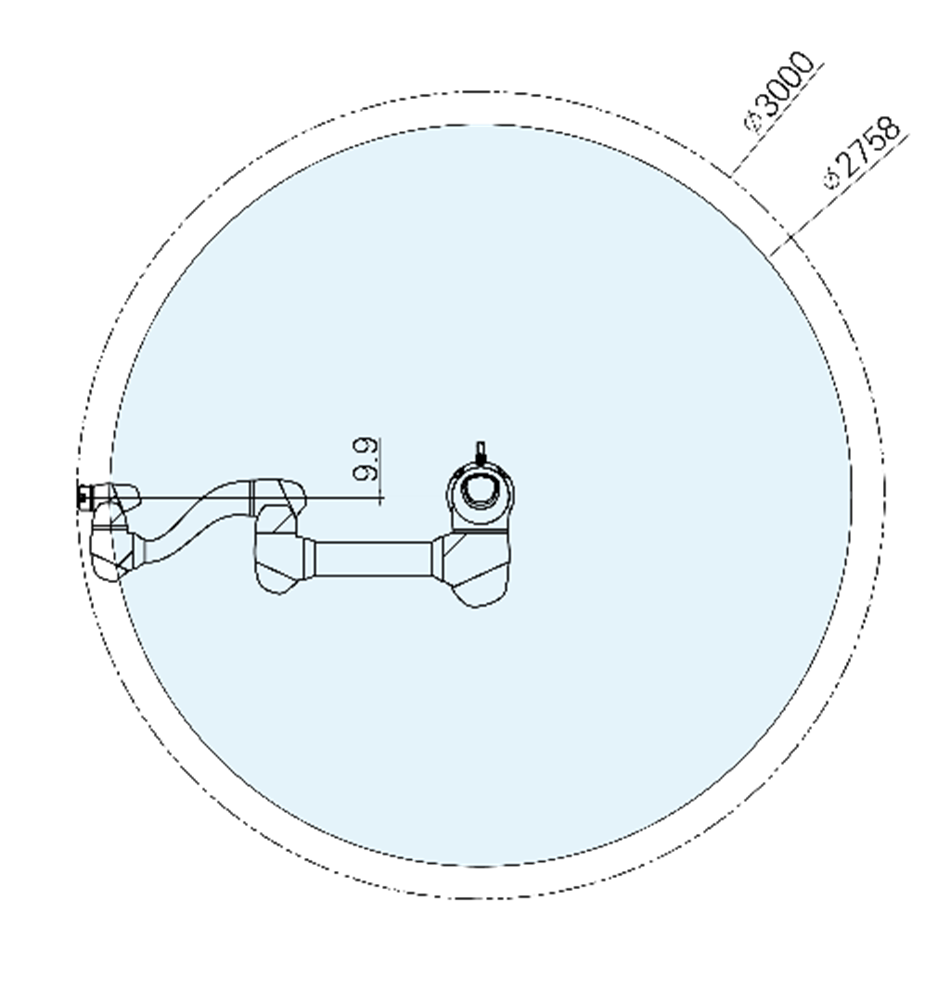
Espaço operacional do robô
M0609
 |  |
M0617
 |  |
M1013
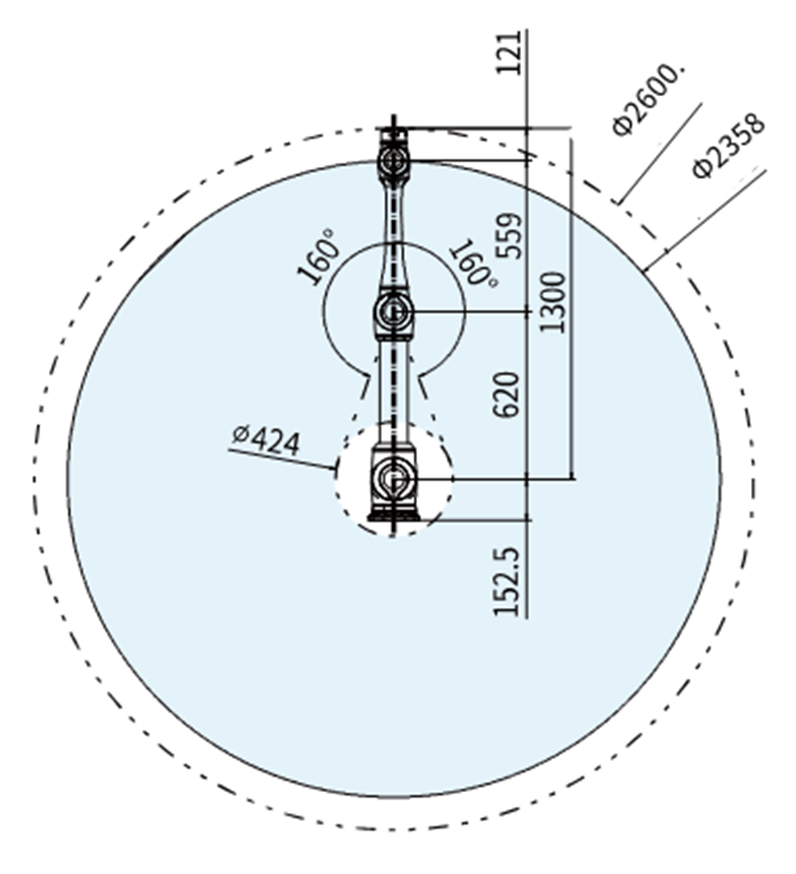 | 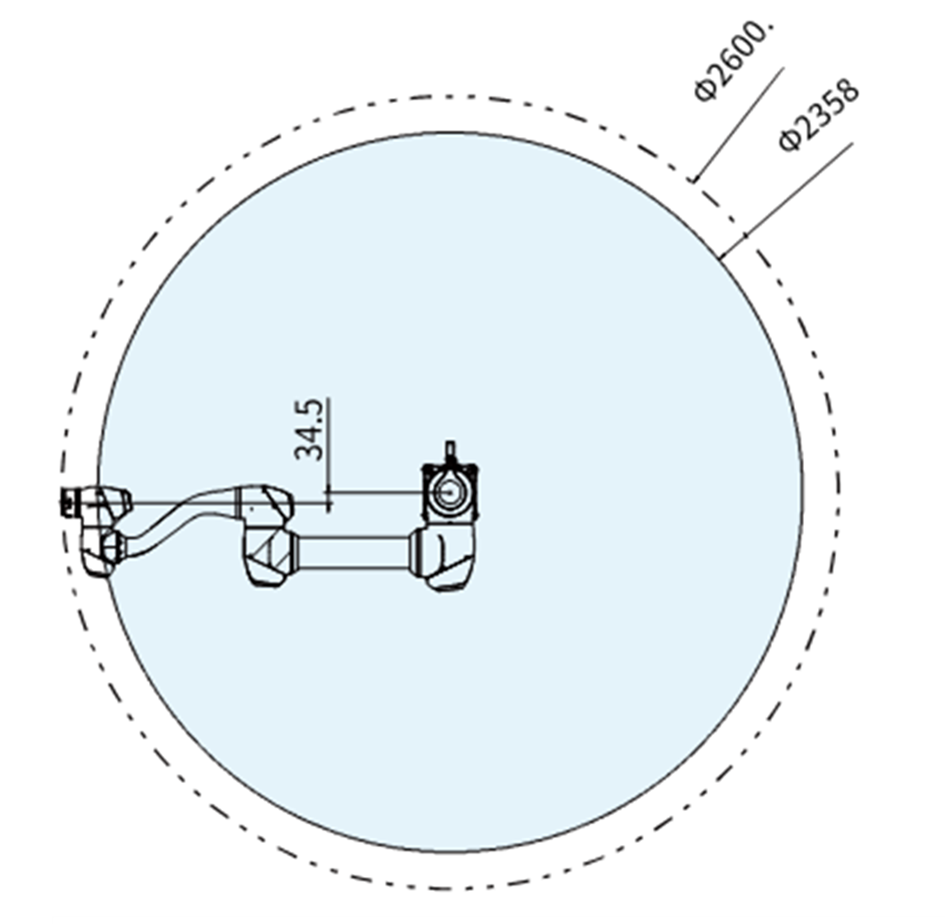 |
M1509
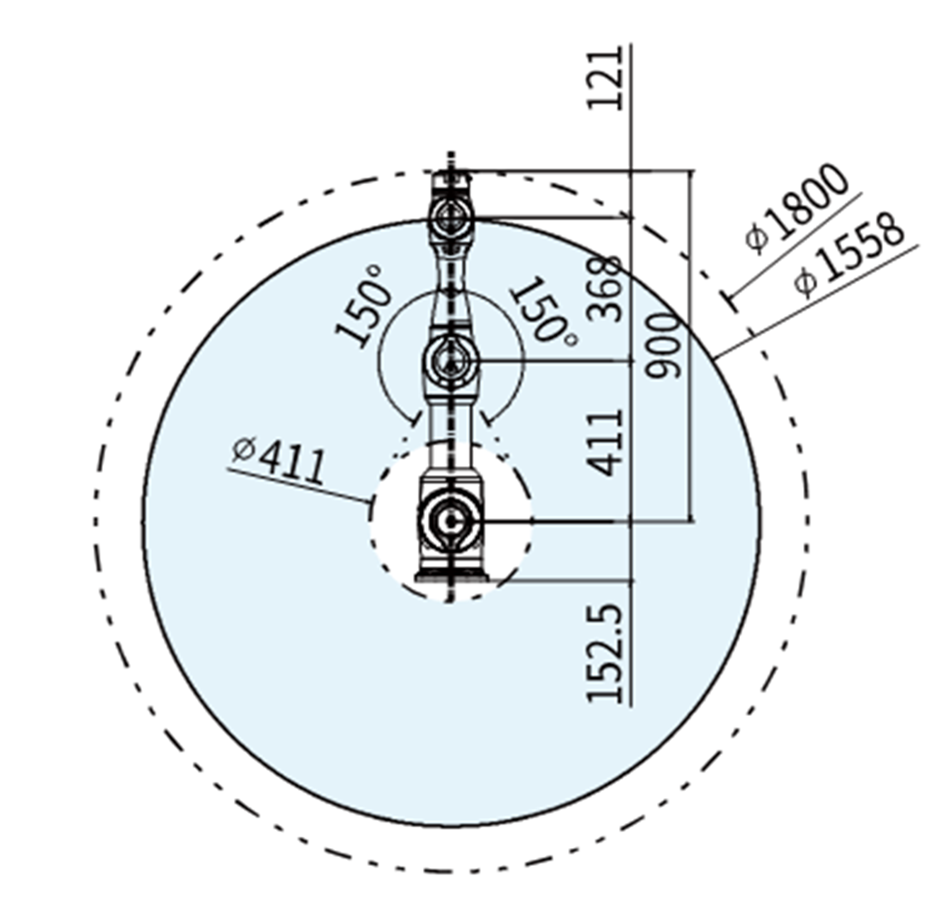 | 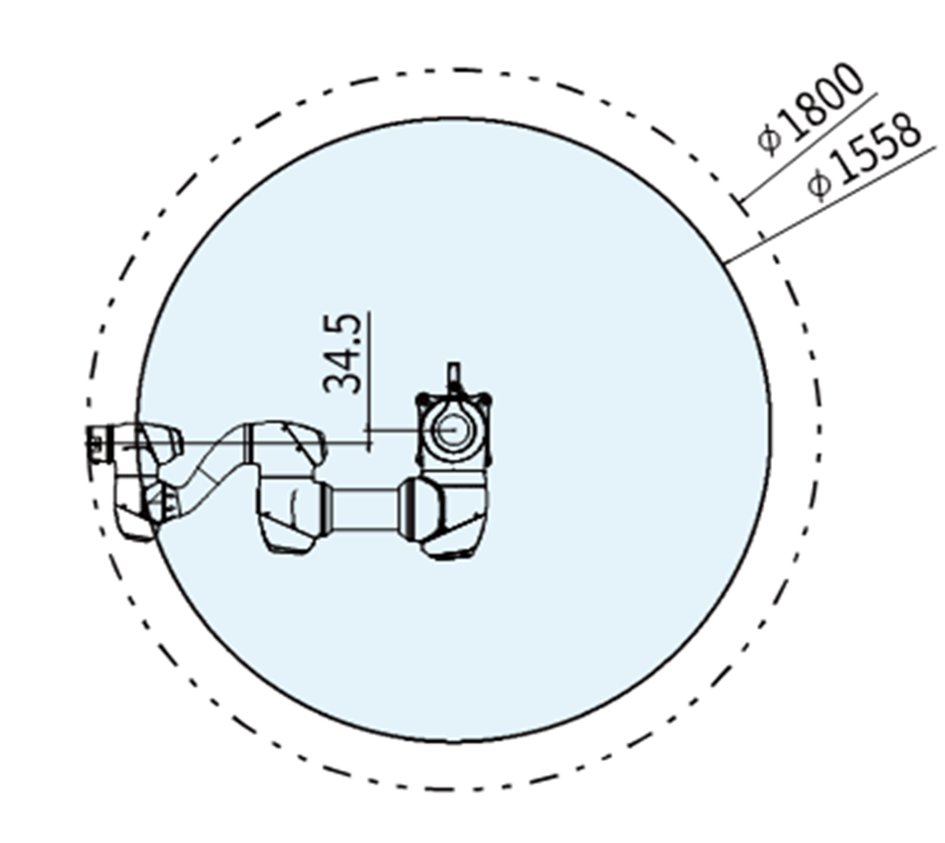 |
H2017
 |  |
H2515
 |  |
Máx. Carga útil dentro do espaço operacional
A carga útil máxima do robô dentro de seu espaço operacional muda de acordo com a distância do centro de gravidade. A carga útil por distância é a seguinte:
Observação
Este diagrama de carga assume um pequeno volume de carga de ferramenta. Ferramentas com um volume maior terão maiores limitações na carga útil acima do centro de gravidade da ferramenta em comparação com uma ferramenta com um peso igual, mas volume menor, e, nesses casos, pode ocorrer vibração.
M0609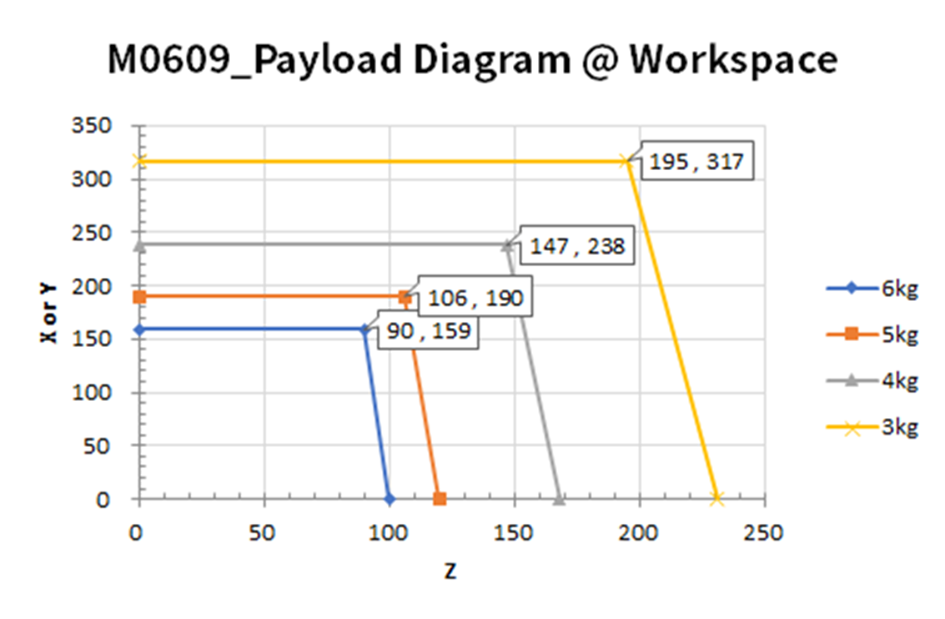 | M0609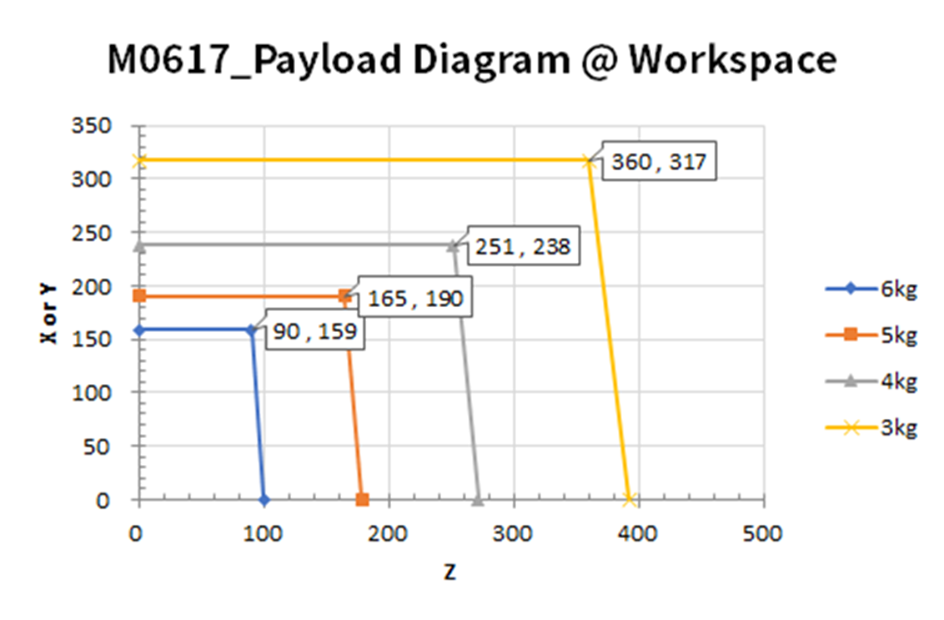 |
M1013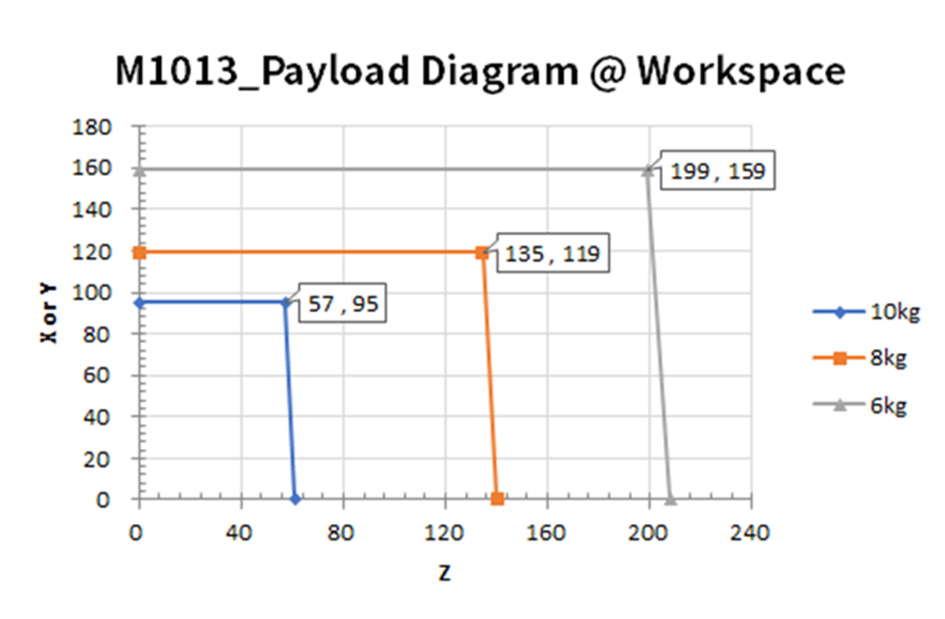 | M1509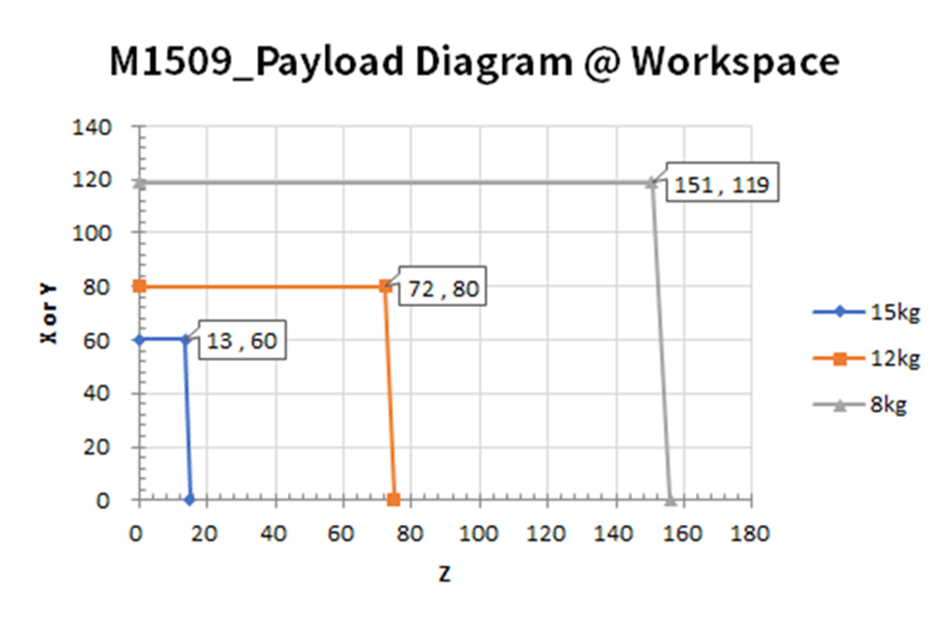 |
H2017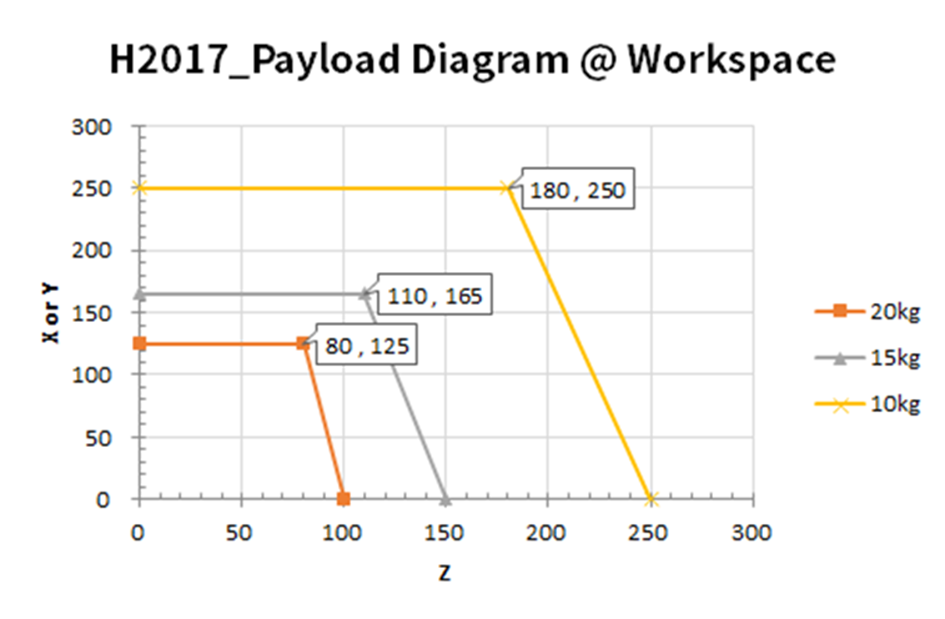 | H2515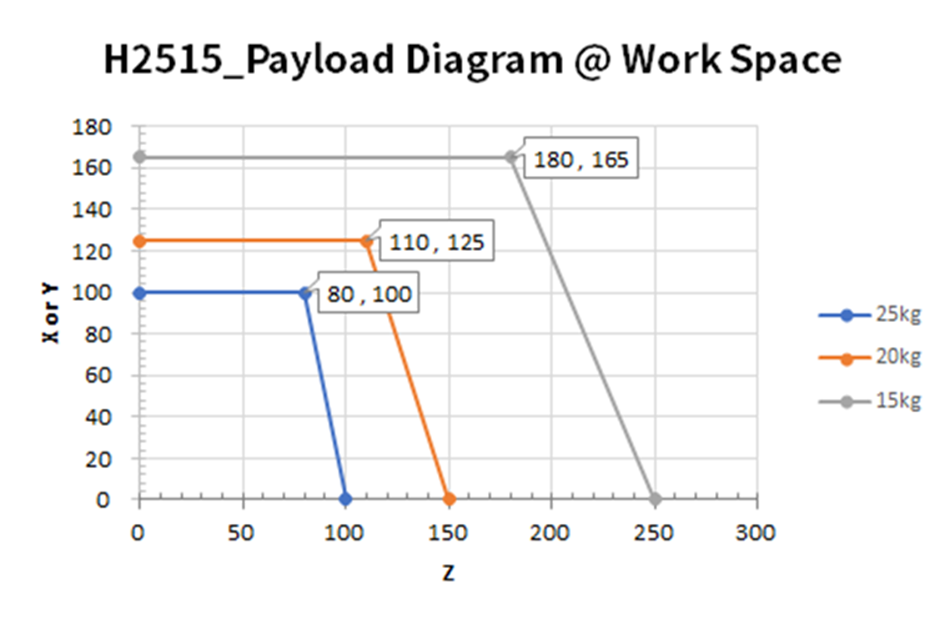 |
Momento e inércia permitidos
O momento e a inércia permitidos do J4-J6 do robô são os seguintes:
Nome do modelo | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Momento permitido | Inércia | Momento permitido | Inércia | Momento permitido | Inércia | |
M0609 | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8,0 kg㎡ | 81 Nm | 4,5 kg㎡ | 36 Nm | 2,0 kg㎡ |
H2515 | ||||||
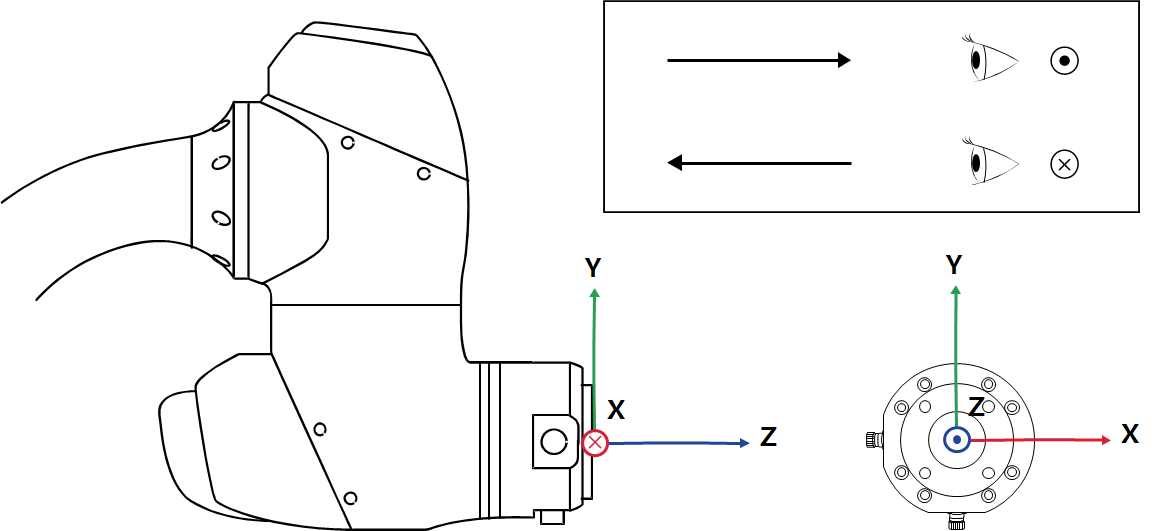
TCP (Tool Center Point, ponto central da ferramenta)
Consulte a figura abaixo para TCP.
Especificações básicas
Nome do modelo | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Peso | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Carga útil dentro do raio de trabalho | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Máx. Raio de trabalho | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Número de eixos | 6 | ||||||
Máx. Velocidade TCP | Acima de 1 m/s. | ||||||
Repetibilidade da posição (ISO 9283) | ±0,03 mm | ±0,1 mm | ±0,05 mm | ±0,03 mm | ±0,1 mm | ||
Classificação de proteção | IP 54 | ||||||
Ruído | Menos de 65 dB | ||||||
Direção de instalação | Qualquer orientação | Somente no andar | |||||
Controlador e pendente de ensino | Controlador Doosan e pendente de ensino | ||||||
Vibração e aceleração | 10≤f > 57㎐ - 0,075 mm de amplitude 57≤f≤150㎐ – 1G | ||||||
Impacto | Amplitude máxima : 50㎨(5 G)
| ||||||
Temperatura operacional | 0 ℃ a 45 ℃ (273 K a 318 K) | ||||||
Temperatura de armazenamento | -5 ℃ a 50 ℃ (268 K a 323 K) | ||||||
Umidade | 20% a 80% | ||||||
Especificações do eixo
Nome do modelo | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Ângulo de operação | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
Máx. Velocidade por eixo (operação de carga útil nominal) | ||||||
J1 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 100 °/s. | 100 °/s. |
J2 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 80 °/s. | 80 °/s. |
J3 | 180 °/s. | 150 °/s. | 180 °/s. | 180 °/s. | 100 °/s. | 100 °/s. |
J4 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J5 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J6 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |