Conectando dispositivos externos
Conexão de dispositivos externos - Sensor de visão
O robô pode ser conetado com um sensor de visão (câmera 2D para medição da posição do objeto), e as medições do sensor de visão podem ser transferidas para o robô através de uma rede para se conetar com os comandos do robô.
Configuração do sensor de visão
Configuração de conexão de comunicação
Conecte as portas LAN dos dispositivos e aplique comunicação TCP/IP para transferir as medições do sensor de visão para o robô. (Consulte Conexão de rede) Defina o endereço IP do sensor de visão para a banda TCP/IP 192.168.137.xxx para permitir a comunicação TCP/IP.
Configuração de trabalho de visão
Para realizar a medição da posição do objeto, é necessário ter uma entrada de imagem e ensino da visão do objeto alvo usando o sensor de visão. Consulte o programa de configuração de trabalho de visão dedicado fornecido pelo fabricante do sensor de visão.
Configuração Formato de dados de medição
Para usar os dados de medição do sensor de visão no trabalho do robô, é necessário executar a calibração das coordenadas do robô de visão, e isso deve ser realizado antes de iniciar o trabalho usando o programa de configuração do sensor de visão. Os dados de medição do sensor de visão devem ser transferidos usando as seguintes configurações de formato:
Formato | pos | , Em inglês | x | , Em inglês | y | , Em inglês | ângulo | , Em inglês | var1 | , Em inglês | var2 | , Em inglês | ... |
|---|
pos: Separador indicando o início dos dados de medição (prefixo)
x: Valor da coordenada X do objeto medido usando o sensor de visão
y: Valor da coordenada Y do objeto medido usando o sensor de visão
ângulo: Valor do ângulo de rotação do objeto medido usando o sensor de visão
Var1... VarN: Informações medidas usando o sensor de visão (por exemplo, dimensão do objeto / valor de verificação de defeito) Pos,254,5,-38,1, 45,3, 1,50.1 (descrição: X-254,5, y-38,1, ângulo-145,3, var1-1, var2-50,1)
Configuração do programa do robô
Quando a conexão de comunicação física entre o sensor de visão e o robô e a configuração do sensor de visão forem concluídas, um programa deve ser definido para permitir que o sensor de visão e o programa do robô sejam vinculados. É possível conetar/comunicar/controlar funções do sensor de visão externo usando Doosan Robot Language (DRL), e é possível configurar o programa no Gravador de Tarefas.
Detalhes e exemplos abrangentes da Doosan Robot Language (DRL) sobre funções de sensores de visão externos são fornecidos no Manual de Programação.
Conectando dispositivo externo – Plataforma DART
A plataforma DART é um software executado em um desktop ou laptop baseado no sistema operacional Windows. Depois que o controlador e o desktop/laptop estiverem conectados pela porta LAN, todas as funções do pendente de instrução estarão disponíveis a partir do momento em que a plataforma DART for executada. Neste momento, o seguinte procedimento de configuração é necessário para conectar com subcontroladores dentro do controlador.
Pesquisa de endereço IP e configuração de conexão
Configuração de conexão de comunicação
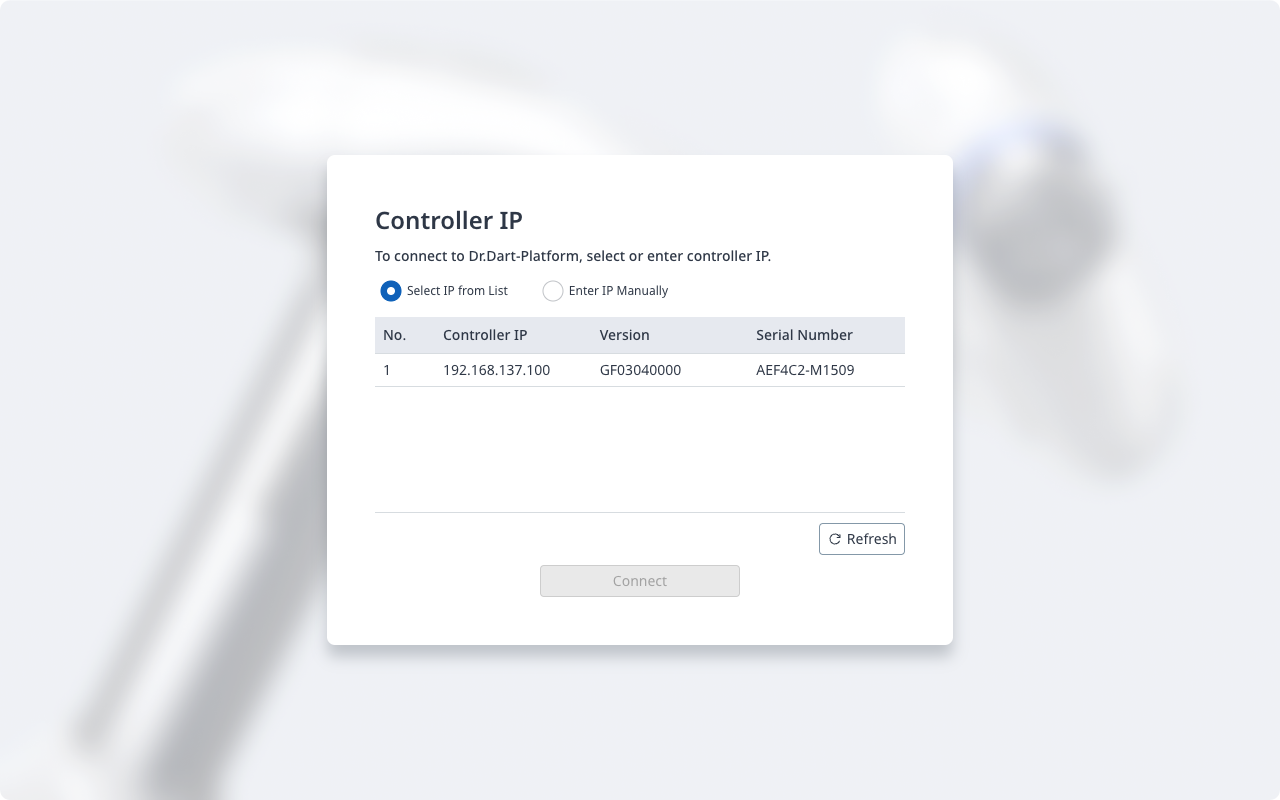
Quando a plataforma DART é executada depois de conectar o laptop à porta LAN do controlador, o endereço IP do controlador, as informações de versão do subcontrolador e o número de série do robô necessário para estabelecer uma conexão são pesquisados automaticamente.
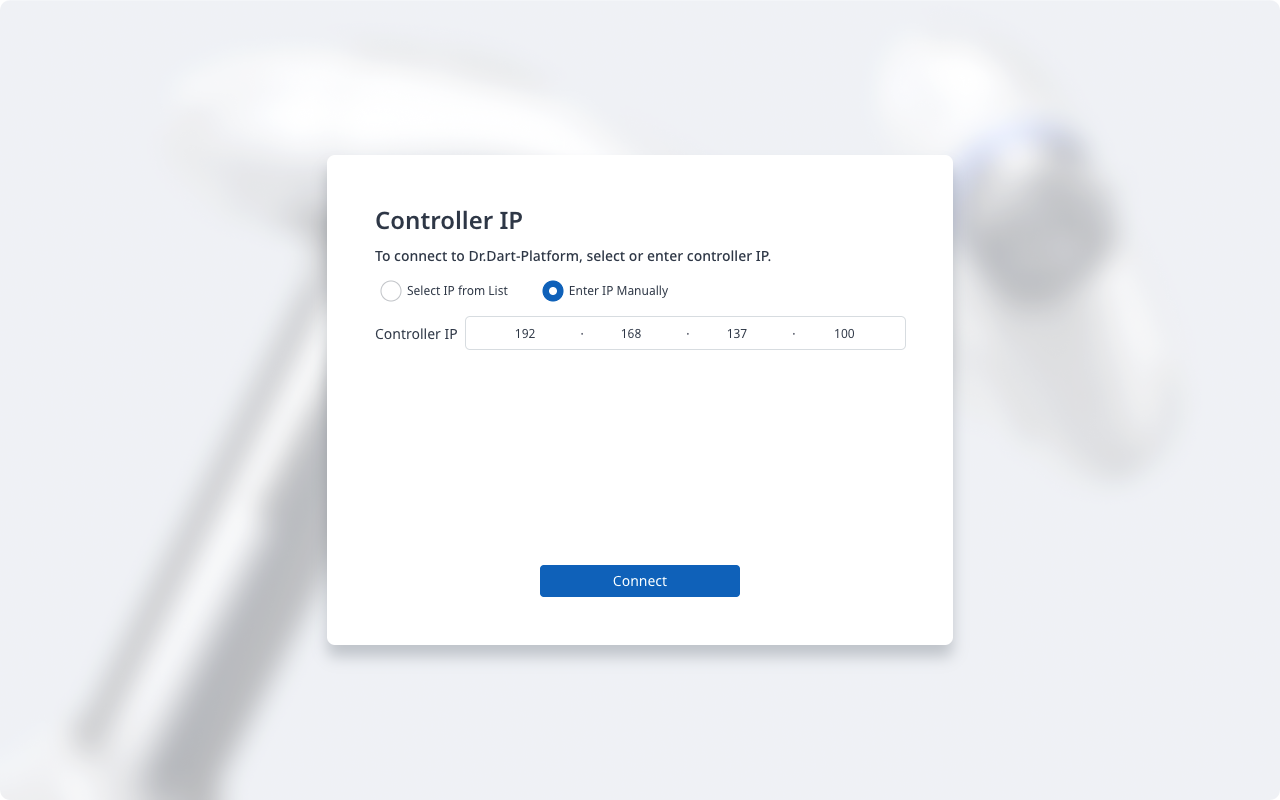
Se a pesquisa falhar, pressione o botão Atualizar para atualizar ou toque em Inserir IP manualmente para inserir manualmente o IP do controlador.
Selecionar o número de série do robô a ser conectado e pressionar o botão Connect estabelece uma conexão entre a plataforma DART e o subcontrolador e permite que o robô seja operado normalmente.
Se houver um problema com a conexão, tente o procedimento abaixo, mas se esse problema persistir, entre em contato com a equipe de vendas ou de serviço para obter assistência.
Se os resultados da pesquisa para endereço IP do controlador conectável, informações de versão do subcontrolador e número de série do robô não forem exibidos: Pressione o botão Atualizar para pesquisar novamente e tente se conectar novamente de acordo com o procedimento acima.
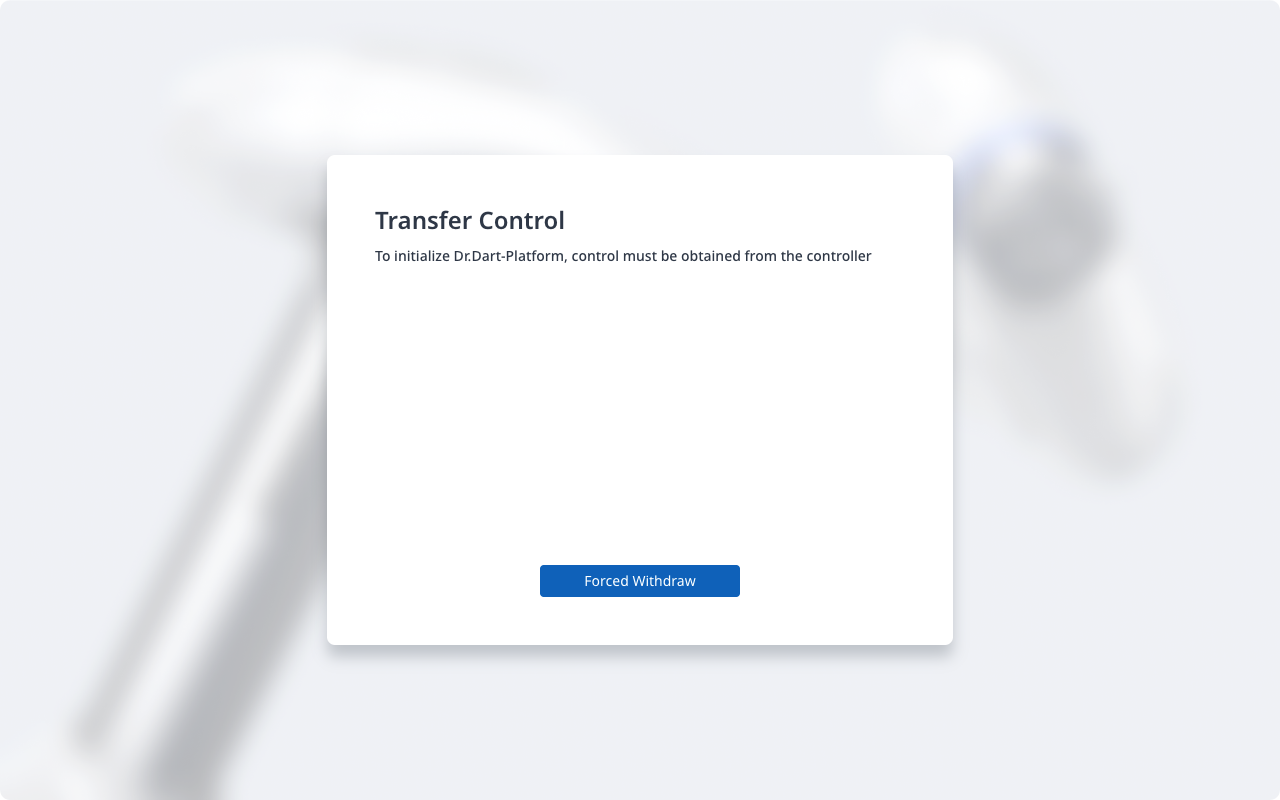
Em seguida, se você vir a página Controle de transferência, conforme mostrado abaixo, toque no botão Retirada forçada para tentar se conectar à Plataforma.