
Configuração de limites do robô
Em Limites do robô, vários limites relacionados ao robô podem ser definidos. Esses limites são usados para garantir que o robô opera com segurança dentro dos limites definidos.
Os limites do robô podem ser definidos em Parâmetros do robô > Definições de segurança > Limites do robô.
- Para obter uma descrição detalhada de cada limite, consulte (3.2.1-pt_PT) Limites do robô .
Os limites do robô são divididos em 3 categorias. Cada categoria inclui os seguintes ecrãs e funções.
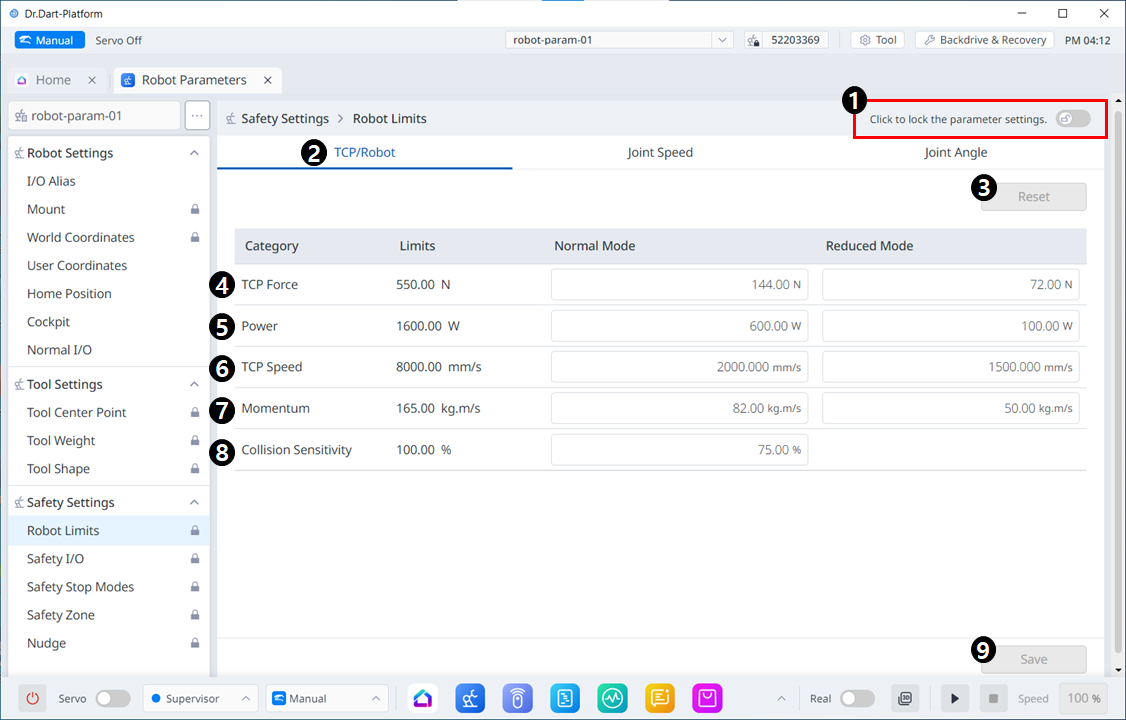
Itens de menu
| Item | Descrição | |
|---|---|---|
| 1 | Bloquear botão de alternância | Utilizado para bloquear o valor definido. A palavra-passe de segurança é necessária para modificar o valor definido. |
| 2 | TCP/Robot | Grande classificação dos limites do robô. |
| 3 | Repor | Utilizado para repor as definições. |
| 4 | Força | Usado para definir a força. |
| 5 | Potência | Utilizado para definir a alimentação. |
| 6 | Velocidade | Utilizado para definir a velocidade. |
| 7 | Impulso | Usado para definir o momento. |
| 8 | Colisão | Utilizado para definir a colisão. |
| 9 | Guardar | Utilizado para guardar a definição aplicável. |
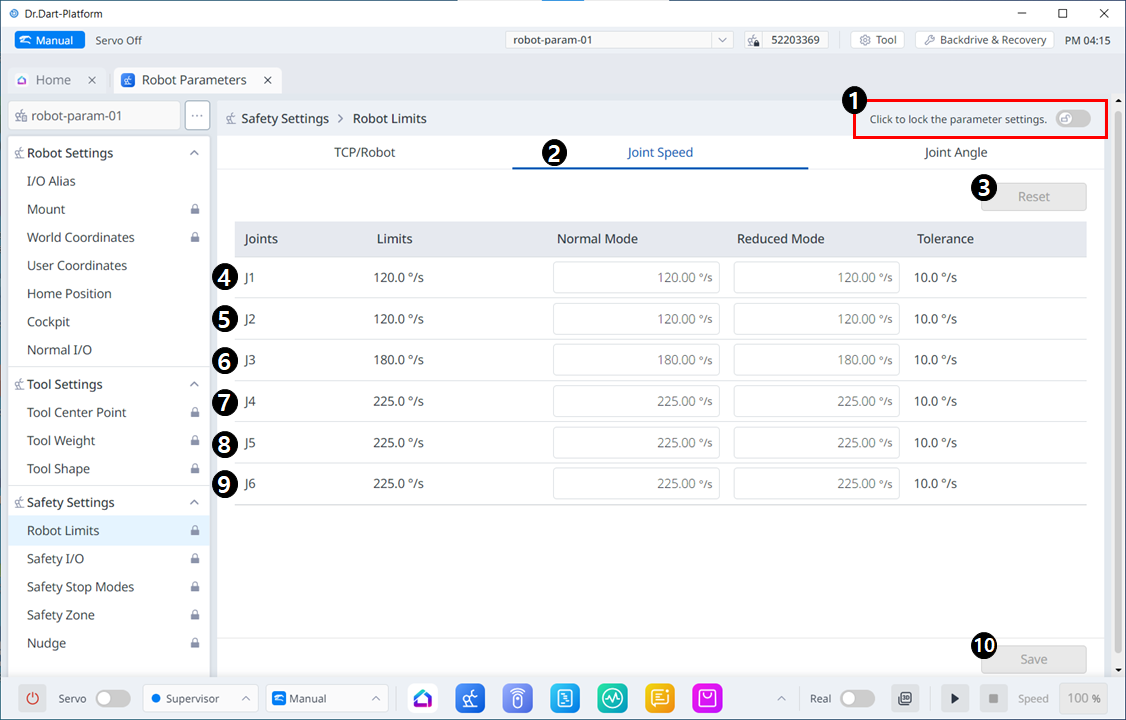
Itens de menu
| Item | Descrição | |
|---|---|---|
| 1 | Bloquear botão de alternância | Utilizado para bloquear o valor definido. A palavra-passe de segurança é necessária para modificar o valor definido. |
| 2 | Velocidade da junta | Grande classificação dos limites do robô. |
| 3 | Repor | Utilizado para repor as definições. |
| 4 | J1 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 5 | J2 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 6 | J3 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 7 | J4 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 8 | J5 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 9 | J6 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 10 | Guardar | Utilizado para guardar a definição aplicável. |
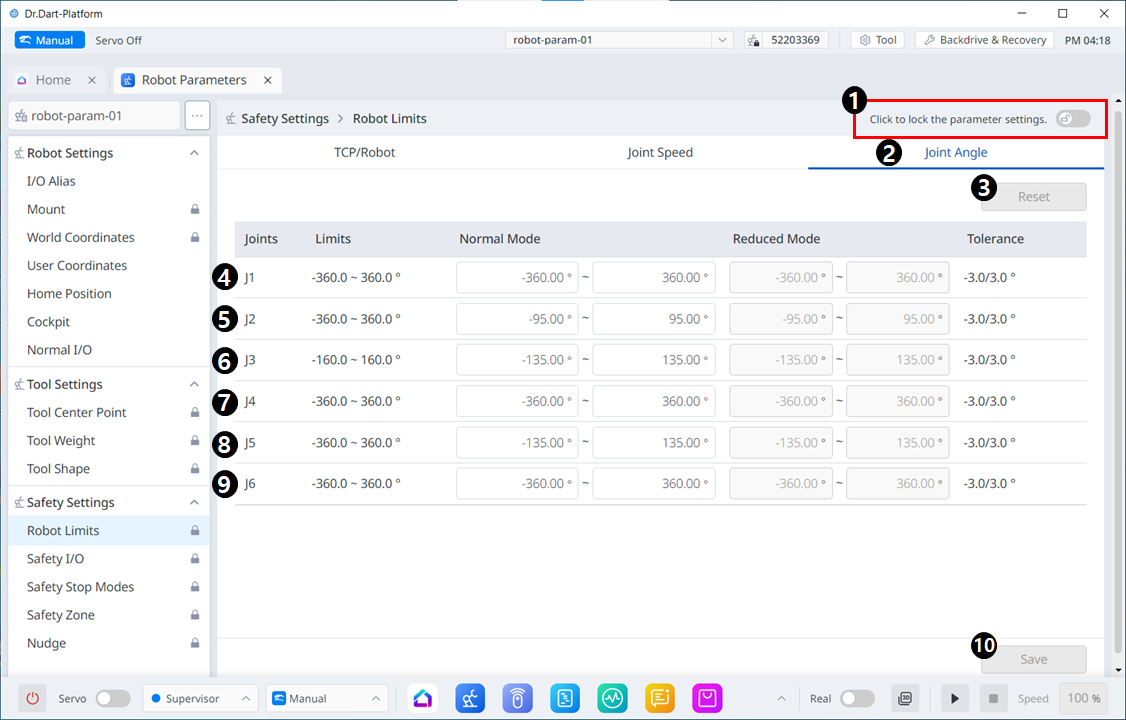
Itens de menu
| Item | Descrição | |
|---|---|---|
| 1 | Bloquear botão de alternância | Utilizado para bloquear o valor definido. A palavra-passe de segurança é necessária para modificar o valor definido. |
| 2 | Ângulo da junta | Grande classificação dos limites do robô. |
| 3 | Repor | Utilizado para repor as definições. |
| 4 | J1 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 5 | J2 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 6 | J3 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 7 | J4 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 8 | J5 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 9 | J6 | Utilizado para definir as definições para os modos normal e reduzido, respetivamente. |
| 10 | Guardar | Utilizado para guardar a definição aplicável. |