
Utilizar a embalagem/desembalar
Itens de menu
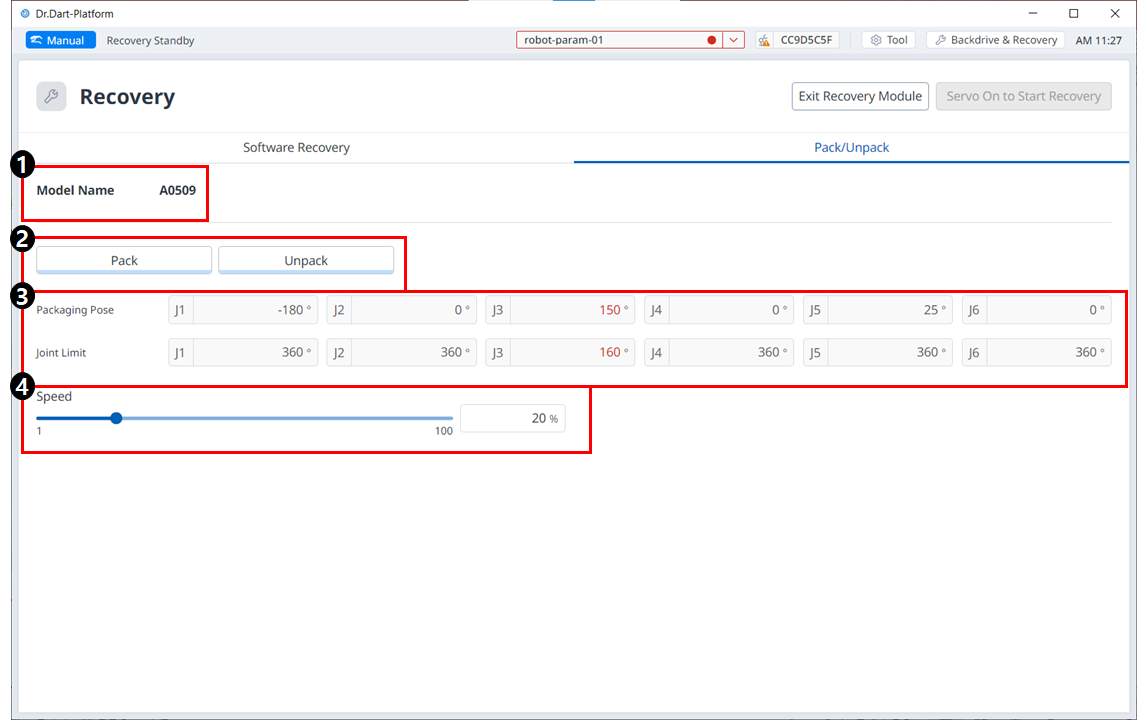
| Item | Descrição | |
|---|---|---|
| 1 | Nome do modelo | É apresentado o nome do modelo do robô ligado. |
| 2 | Embalar/desembalar | Pode selecionar Pack ou Unpack. |
| 3 | Limite de pose/junção de embalagem | Os valores limite de pose e articulação aparecem. |
| 4 | Relação de velocidade | A velocidade do modo pack ou unpack pode ser ajustada através de uma barra deslizante ou entrada. |
Para configurar o modo de embalagem, siga estas etapas:
- Toque no menu Recuperação no painel de cabeçalho.

- Selecione a guia Modo de embalagem.

- Para ativar o modo de embalagem, toque no botão Servo On to Start Recovery.

- O robô se move automaticamente para a posição de embalagem definida.
- O botão Pack permite-lhe colocar o robot na posição Pack e o botão Desembalar permite-lhe colocar o robot na posição inicial predefinida.