
Configuração do sistema
| Não | Nome | Descrição |
|---|---|---|
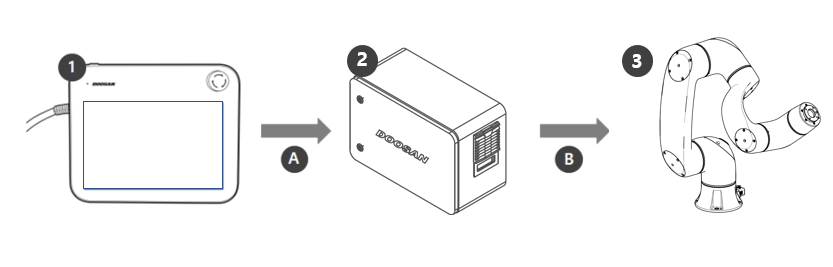
| 1 | Ensine o pendente | Este dispositivo gerencia todo o sistema e é capaz de ensinar ao robô poses específicas ou fazer configurações relacionadas aos manipuladores e controladores. |
| 2 | Controlador | Usado para ajustar o movimento do robô de acordo com a pose ou movimento definido pelo pendente de ensino. Possui várias portas de E/S que permitem a conexão e uso de vários tipos de equipamentos e dispositivos. |
| 3 | Manipulador | Este é um robô colaborativo industrial que pode ser usado com uma variedade de acessórios de ferramentas para transportar objetos ou montar peças. |
| A | Comando/Monitorização | |
| B | Fonte de alimentação/rede |