
Kołnierz we/wy
Osłona kołnierza końcowego robota jest wyposażona w dwa 8-stykowe złącza M8. Ich umiejscowienie i kształt przedstawiono na rysunku poniżej.
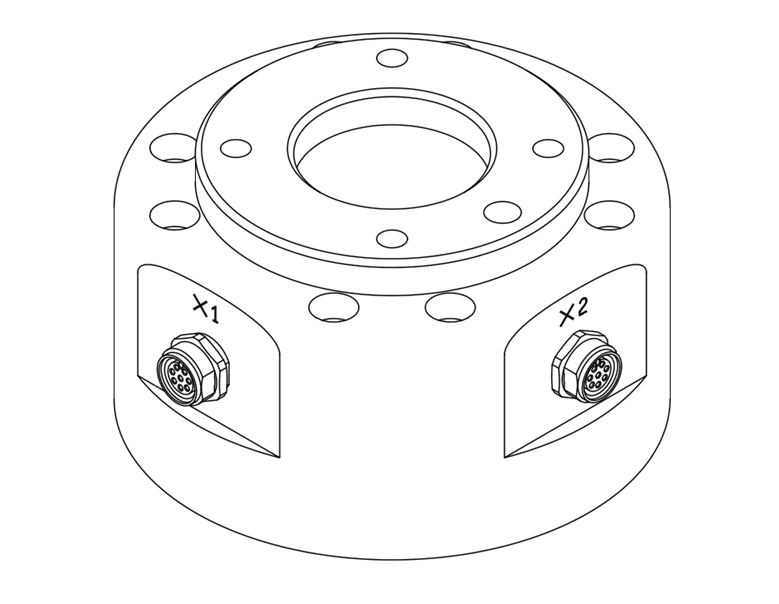
Złącze dostarcza zasilanie i sygnały sterujące niezbędne do obsługi chwytaka lub czujników wbudowanych w poszczególne narzędzia robota. Poniżej podano przykłady kabli przemysłowych (można też stosować ich odpowiedniki):
- Phoenix 1404178, męski (prosty)
- Phoenix 1404182, męski (kąt 90 stopni)
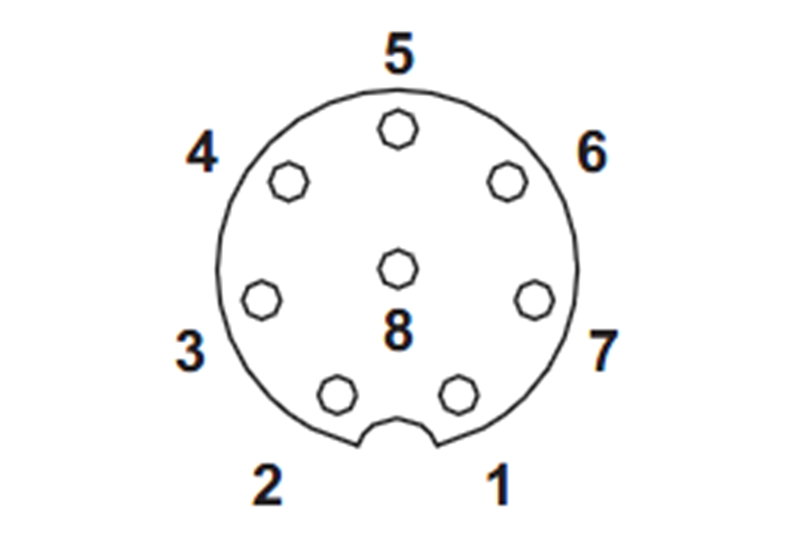
Rozmieszczenie styków w każdym złączu jest następujące:
Schemat poglądowy
Funkcje we/wy realizowane przez złącza X1 i X2 różnią się od siebie. Szczegółowe ustawienia wejść i wyjść podano w tabeli poniżej.
Ustawienie X1 (cyfrowe we/wy)
Lp. | Sygnał |
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Digital Output 3 |
5 | +24V |
6 | Digital Input 3 |
7 | Digital Input 2 |
8 | GND |
Ustawienie X2 (cyfrowe we/wy)
Lp. | Sygnał |
1 | Digital Input 4 |
2 | Digital Output 4 |
3 | Digital Output 5 |
4 | Digital Output 6 |
5 | +24V |
6 | Digital Input 6 |
7 | Digital Input 5 |
8 | GND |
Napięcie zasilania wewnętrznego we/wy kołnierza jest ustawione na 24 V, a szczegółowe parametry zasilania, którymi należy kierować się podczas podłączania wejść/wyjść, podano w tabeli poniżej.
Parametr | Min. | Typ | Maks. | Jednostka |
Supply voltage | - | 24 | - | V |
Supply current | - | - | 3 | A |
Digital output | - | 6 | - | EA |
Digital input | - | 6 | - | EA |
Ustawienie jest ładowane w następujący sposób od 11 kwietnia 2024 r.
Ustawienie X1
No | Sygnał |
|---|---|
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Analog Input 1 / RS-485 + |
5 | +24V / +12V / 0V (off) |
6 | Analog Input 2 / RS-485 - |
7 | Digital Input 2 |
8 | GND |
Ustawienie X2
| No | Sygnał |
|---|---|
| 1 | Digital Input 3 |
| 2 | Digital Output 3 |
| 3 | Digital Output 4 |
| 4 | Analog Input 3 / RS-485 + |
| 5 | +24V / +12V / 0V (off) |
| 6 | Analog Input 4 / RS-485 - |
| 7 | Digital Input 4 |
| 8 | GND |
Opis funkcji I/O
| Typ | Opis |
|---|---|
| Power | Ustaw wewnętrzne zasilanie na 0 V (domyślnie), 12 V lub 24 V |
| Digital Output | ustaw na PNP (typ źródła, domyślnie) lub NPN (typ ujścia) |
| Digital Input | PNP (typ źródła, domyślnie) |
| Analog Input | ustaw na napięcie (0–10 V) lub natężenie (4–20 mA, domyślnie) |
| RS-485 | Maksymalna szybkość transmisji 1 M |
Ustaw wewnętrzne zasilanie na 0 V, 12 V lub 24 V. Specyfikacja elektryczna jest pokazana poniżej:
| Parametr | Min | Typ | Max | Jednostka |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Ostrzeżenie
- Należy skonfigurować narzędzia i chwytak w taki sposób, aby nie powodowały żadnych zagrożeń po odcięciu zasilania.
(np. poprzez wypadnięcie obrabianego przedmiotu z narzędzia) - Gdy robot jest zasilany, na zacisku nr 5 w każdym złączu jest obecne przez cały czas napięcie 24 V. Należy więc pamiętać, aby odłączyć zasilanie od robota podczas konfigurowania narzędzia i chwytaka.