Wyrównaj panel
Wyrównaj menu
| Item | Description | |
|---|---|---|
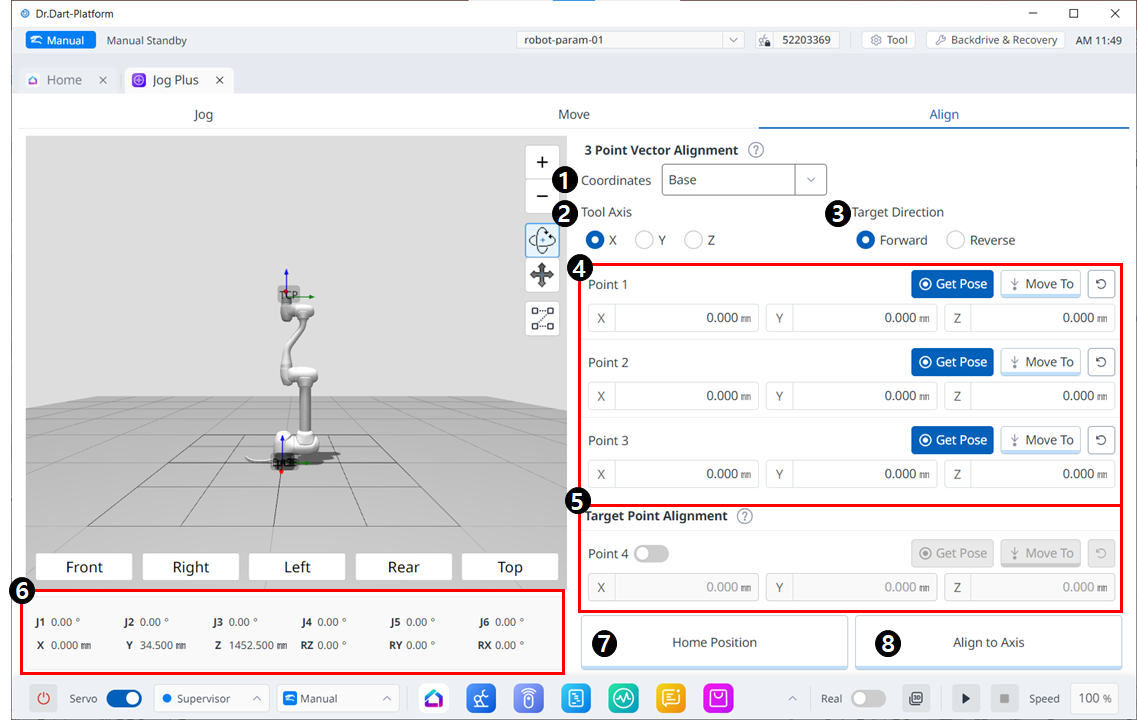
| 1 | Coordinates | Wybierz referencyjny układ współrzędnych dla pozycji na rysunkach 4 i 5. |
| 2 | Tool Axis | Wybierz, która oś TCP ma zostać wyrównana. |
| 3 | Target direction | Wybierz kierunek do przodu/do tyłu |
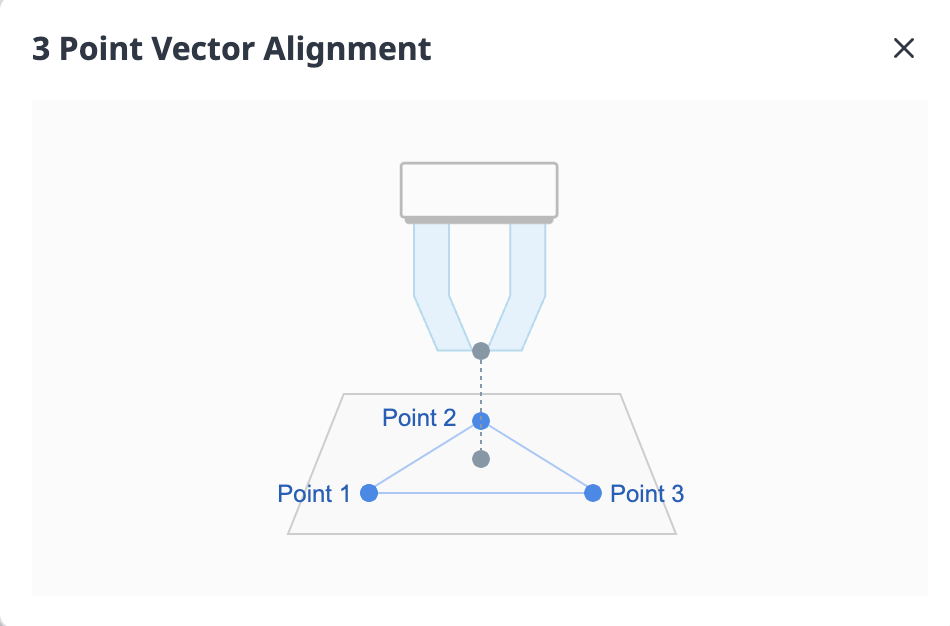
| 4 | Pick points on a plane | Wybierz trzy punkty, aby zdefiniować płaszczyznę. Definicje są następujące:
|
| 5 | Target Point Alignment | Wybierz punkt, w którym chcesz umieścić TCP. Jest to opcjonalne i jeśli nie jest zaznaczone, tylko orientacja zostanie posortowana od bieżącej lokalizacji. |
| 6 | Robot Posture | Wyświetla aktualną postawę stawową robota i postawę zadaniową. W przypadku postawy zadaniowej stosuje się referencyjny układ współrzędnych wybrany na rysunku 1. |
| 7 | Home Position | Po kliknięciu przycisku przesuwa się on do pozycji wyjściowej. |
| 8 | Align to Axis | Po kliknięciu przycisku następuje algin. |