
Zamontować
Pozycję instalacji robota można ustawić w menu pozycja instalacji robota (montaż). Jeśli robot jest zainstalowany na płaskiej powierzchni, ten krok można pominąć.
Pozycję instalacji robota można ustawić w menu Parametry robota > Ustawienia robota > Montaż.
- Kąt montażu można zmierzyć za pomocą funkcji automatycznego pomiaru. Jeśli jednak kąt jest mniejszy niż 5 stopni, automatyczny pomiar jest niedostępny.
- Jeśli robot jest zainstalowany na suficie lub ścianie, kąt instalacji robota można ustawić z obrotami osi Y i osi Z.
- Ponieważ automatyczne obliczanie masy narzędzia jest wykonywane na podstawie grawitacji, zaleca się zresetowanie masy narzędzia po zakończeniu ustawiania.
Uwaga
- Podczas ustawiania pozycji instalacji robota (montowania) Workcell, zaleca się również zmianę współrzędnych świata. Jeśli współrzędne świata nie zostaną zmienione, pozycja robota na ekranie symulatora robota manipulatora jest wyświetlana jako robot instalowany na płaskiej powierzchni (podstawowej).
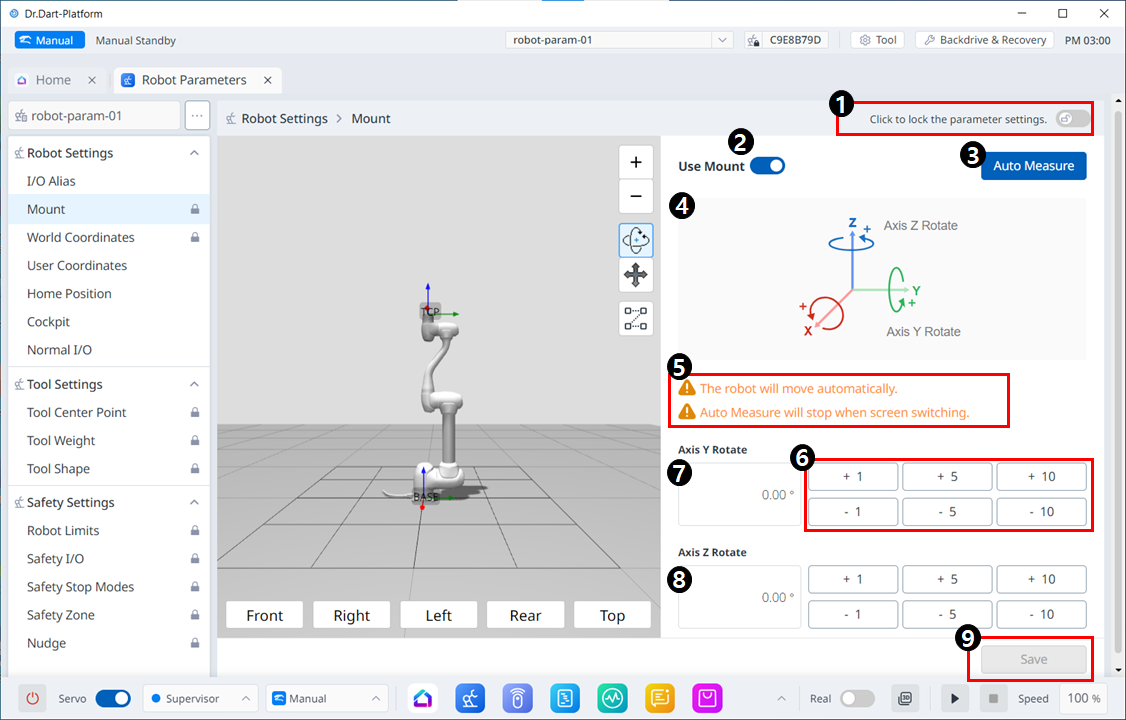
Układ menu
| Pozycja | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Użyj mocowania | Przycisk umożliwiający użycie uchwytu. Przycisk jest dostępny po odblokowaniu. |
| 3 | Pomiar automatyczny | To automatyzuje nakazaną operację. Symulacja 3D obok pokazuje ten ruch. |
| 4 | Obraz informacyjny | Jest to obraz, który mówi o górze. |
| 5 | Komunikat informacyjny | Jest to komunikat informujący o automatycznym pomiarze. |
| 6 | Przycisk zwiększania/zmniejszania | Pozwala to zwiększyć lub zmniejszyć tyle, ile chcesz. |
| 7 | Pole wejściowe obrotu osi Y | Kąt obrotu osi Y można wprowadzić bezpośrednio. |
| 8 | Pole wejściowe obrotu osi z | Kąt obrotu osi z można wprowadzić bezpośrednio. |
| 9 | Przycisk Zastosuj | Pozwala to na zastosowanie ustawionych wartości. |