
Przegląd osobliwości
Osobliwość w robocie wieloprzegubowym odnosi się do pozycji (lub punktu), w której robot ma trudności z obliczeniem swojej następnej pozycji podczas ruchu. Roboty wieloprzegubowe obliczają każdy kąt połączenia podczas ruchu w oparciu o koniec robota
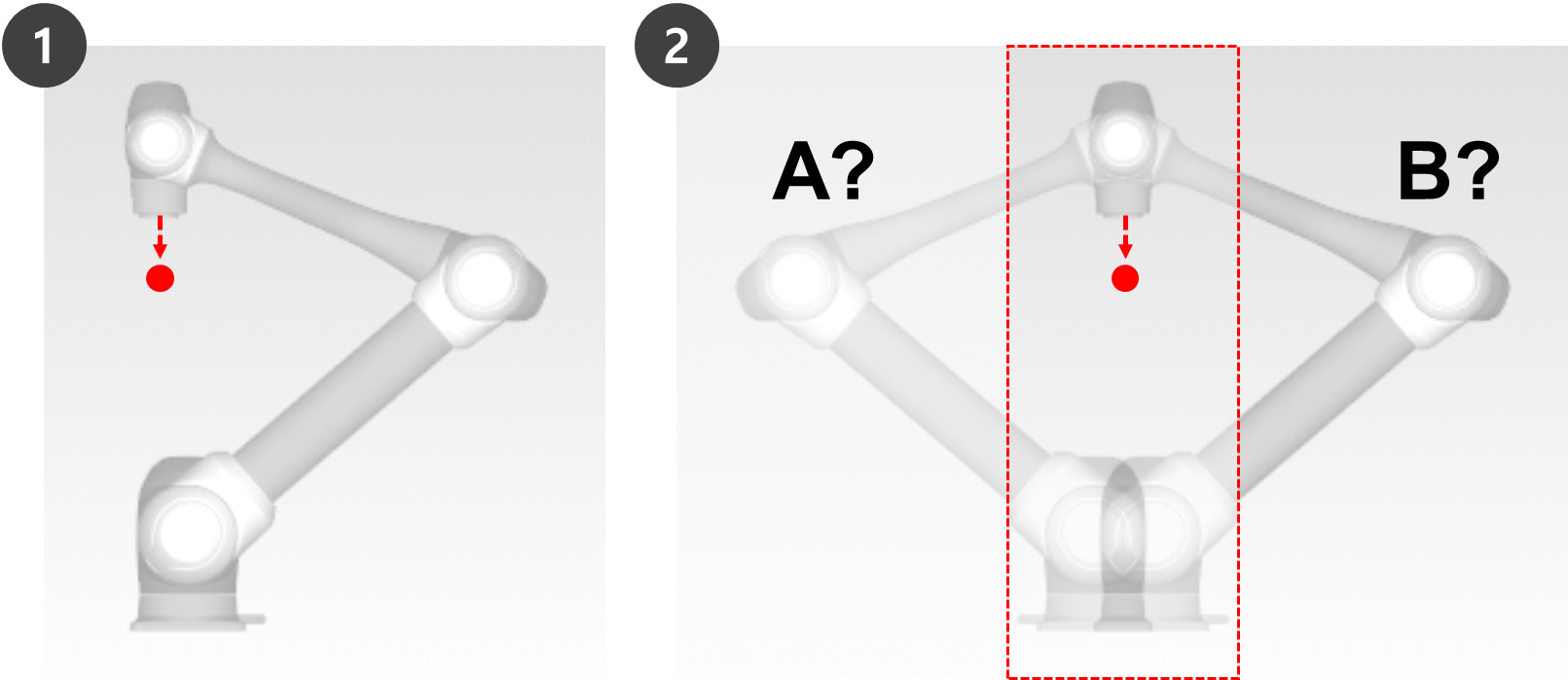
Na przykład na rys. Poniżej, gdy robot przesuwa się do czerwonej kropki, robot nie będzie w stanie określić, czy przesunąć swoje połączenia, aby ustawić pozycję A lub pozycję B, jak pokazano na rys. 2. Ta pozycja (lub punkt) nazywana jest osobliwością.
W pobliżu osobliwości ruch robota nie jest płynny pod względem płaszczyzny, punktu i linii, ruch liniowy końca robota może nie być utrzymany, a błąd pozycji podczas sterowania może wzrosnąć. Osobliwość występuje w trzech przypadkach, jak pokazano na poniższym rysunku, w tym gdy połączenia robota tworzą linię.
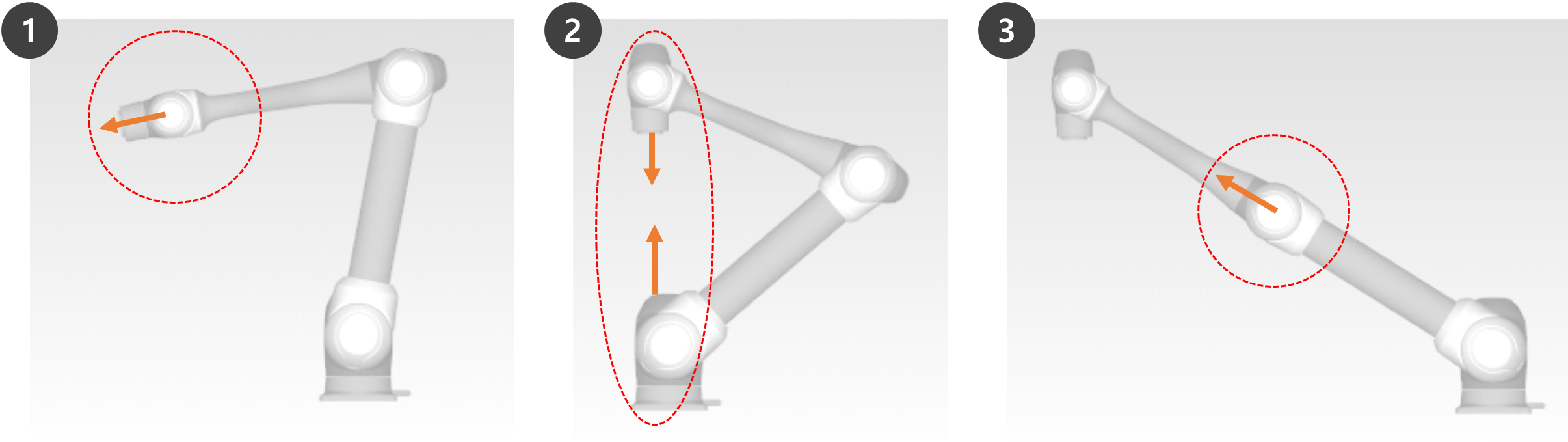
Osobliwość nadgarstka: Gdy nadgarstek robota tworzy linię, gdy oś 5 zbliża się do 0º
- W porównaniu do ludzkiego ramienia osie 4, 5 i 6 odpowiadają stawom nadgarstka.
- Osobliwość ramion: Gdy osie 6 i 1 znajdują się na tej samej linii
- W porównaniu do ludzkiego ramienia, osie 2 odpowiadają stawom barkowym.
- Osobliwość łokcia: Gdy robot tworzy linię, gdy oś 3 zbliża się do 0º
- W porównaniu do ludzkiego ramienia, oś 3 odpowiada łokciu.
Uwaga
Na operacje ręczne i automatyczne poruszające się z obrotem przegubu nie ma wpływu osobliwość.
- Ruch zadania, polecenie MoveL itp.
- Osobliwość występuje tylko podczas ręcznej i automatycznej pracy, gdy robot kończy wykonywanie ruchu liniowego.
- Ruch przegubu, polecenia MoveJ
- W strefie osobliwości kontrola siły lub kontrola zgodności są niedostępne.
- Ponieważ prędkość obrotu niektórych osi gwałtownie wzrasta, gdy ruch liniowy przechodzi przez osobliwość, możliwe jest naruszenie limitu prędkości połączenia lub naruszenie limitu kąta połączenia.
Jak uniknąć osobliwości
Roboty Doosan Robotics oferują opcje, aby uniknąć osobliwości podczas kontroli ruchu. Zaleca się jednak skonfigurowanie zadania, które nie tworzy wyjątków za pomocą poleceń ruchu połączenia, takich jak MoveJ w strefach osobliwości.