
Ustawianie współrzędnych odniesienia bazy do przeniesienia
Aby przesunąć robota w oparciu o jego współrzędne bazowe:
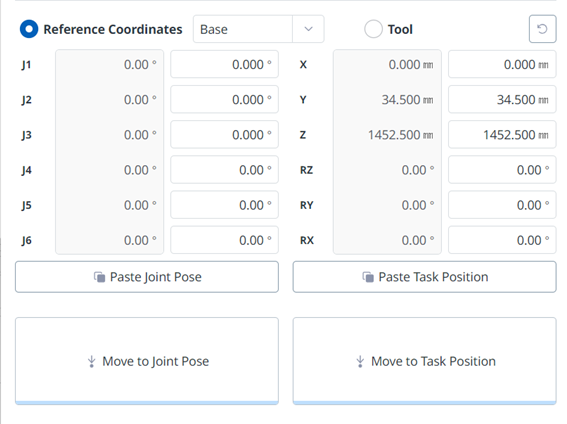
- Wybierz kartę Przesuń, a następnie wybierz element Współrzędna odniesienia.
- Wybierz współrzędną wyświetlania jako podstawę.
- Naciśnij i przytrzymaj przycisk, aby przejść do odpowiedniej pozycji zadania i przejść do ustawionych współrzędnych.