Przegląd kąta Eulera
Kąt Eulera jest sposobem wyrażania kątów osi X, Y i z, które są prostopadłe między sobą w kierunku obiektu. A, B i C odnoszą się do następujących po sobie kątów obrotu. Każdy producent robota definiuje tę kolejność rotacji A, B i C inaczej, np. Rz-Ry-Rx lub Rx-Ry-Rz.
Doosan Robotics używa Rz-Ry-Rz. Tutaj Rz oznacza obrót w osi z, a Ry oznacza obrót w osi Y. RZ może być wyrażona jako kąt A, Ry jako kąt B i Rz jako kąt C, aby wskazać bieżący kierunek obrotów obiektu. Zauważ, że po obróceniu współrzędnych w kierunku osi z obroty będą wykonywane na podstawie nowych współrzędnych.
Można to zwizualizować w krokach od 4 do 1.
Załóżmy, że są współrzędne (X, Y, z).
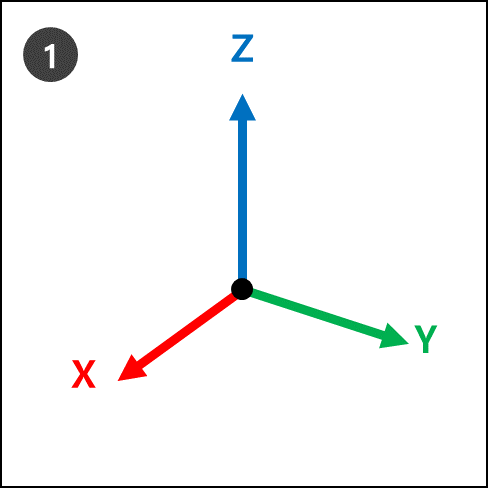
RZ: Obrócić o stopni od osi Z.
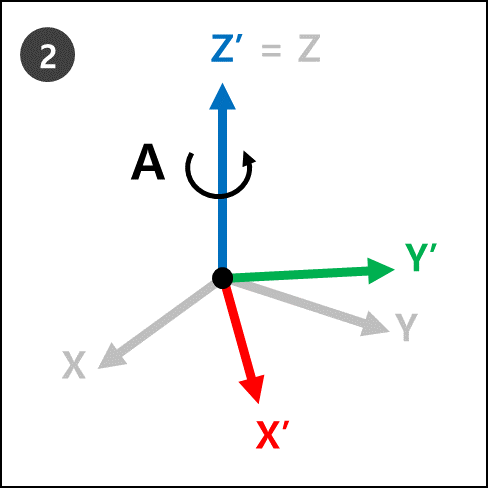
Y : Obrócić o B stopni od nowej osi Y (Y') nowych współrzędnych (X', Y', z') w kroku 2.
RZ : Obrócić o B stopni od nowej osi z (z'') nowych współrzędnych (X'', Y'', z') w kroku 3.
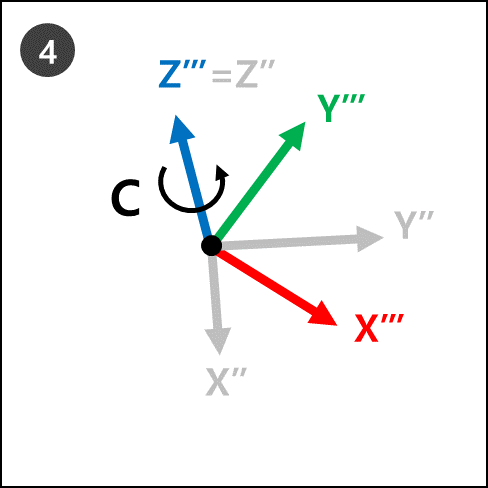
Nowe współrzędne (z'''', Y''', X''' w kroku 4 odnoszą się do bieżącego obrotu robota, gdy stosowane są kąty Eulera A, B i C.
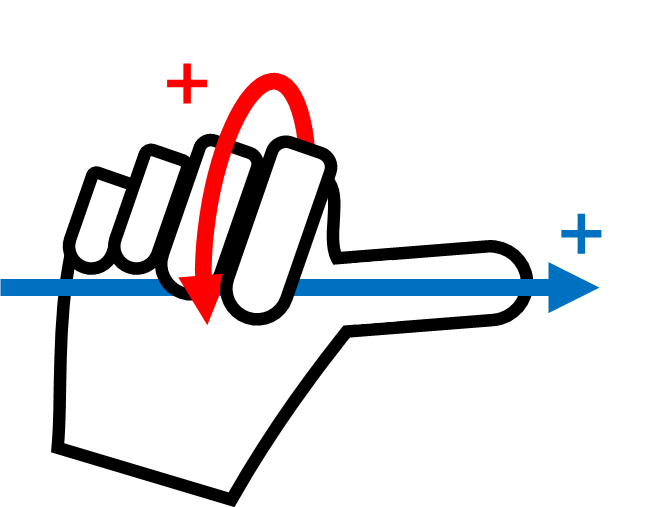
Można to łatwo zwizualizować prawą ręką. Wykonaj następującą pozycję prawą ręką. Nazywa się to regułą prawej ręki, a ustawienie kciuka (oś X), palca wskazującego (oś Y) i środkowego palca (oś z) prostopadle do siebie stworzy współrzędne składające się z osi X, Y i Z.
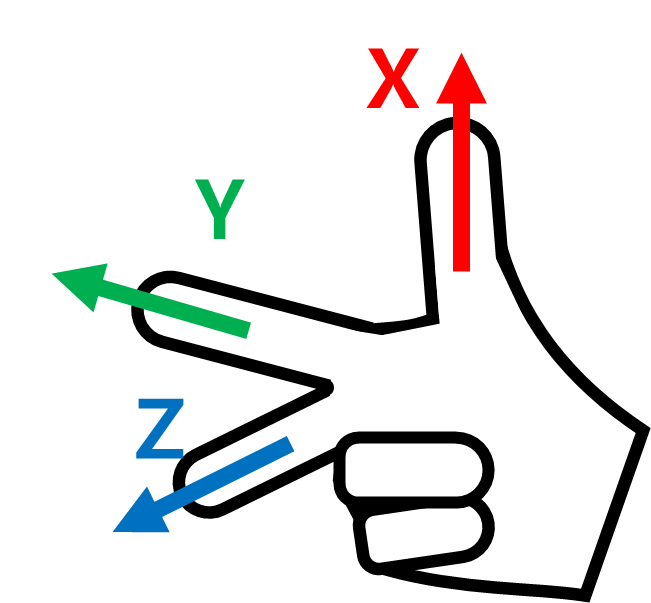
Następnie wykonaj prawą regułę kartezjańską i wykonaj obroty Rz, Ry i Rz w kolejności sekwencyjnej.
RZ: Obrócić środkowy palec (oś z) o stopni.
Y: Obrócić palec wskazujący (oś Y) o B stopni.
RZ: Obrócić środkowy palec (oś z) o C stopni.
Uwaga
Kierunek + obrotu A, B i C jest kierunkiem czterech palców z wyjątkiem kciuka, gdy kciuk jest skierowany w kierunku +, a cztery palce są zaciśnięte. Nazywa się to prawem śruby zgodnej z ruchem wskazówek zegara.