
Wykonywanie na podstawie Robot Tool

Aby przesunąć robota na podstawie narzędzia robota, wykonaj następujące czynności:
- Wybierz narzędzie jako referencyjny układ współrzędnych.
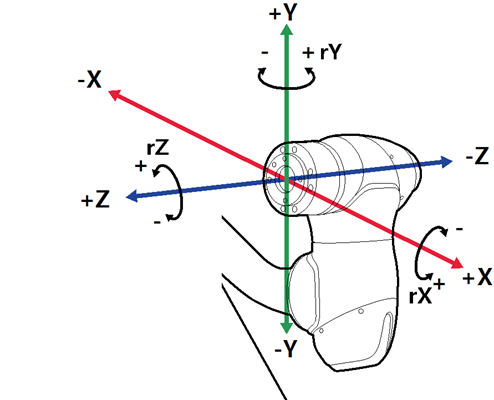
- W panelu zadań wybierz oś (X~RX), dla której chcesz dostosować kąt.
- Naciśnij i przytrzymaj przycisk kierunkowy (+, _), aby przesunąć odpowiednią oś.
Uwaga
- Strefa bezpieczeństwa nie dotyczy trybu wirtualnego.
- Rx, Ry i Rz są wykonywane zgodnie z TCP (pozycja środkowa narzędzia).