
Przegląd funkcji Servo On

Serwomechanizm włączony odnosi się do stanu gotowości, w którym ramię robota może być obsługiwane przez zasilanie połączeń. Naciśnięcie przycisku zatrzymania awaryjnego lub naruszenie krytycznych limitów bezpieczeństwa powoduje ustawienie stanu Servo Off. W stanie wyłączenia serwomechanizmu zasilanie połączeń zostaje odcięte, co powoduje, że ramię robota nie może być obsługiwane, a Edytor zadań i Jog Plus, które są związane z działaniem ramienia robota, są wyłączone w menu głównym.
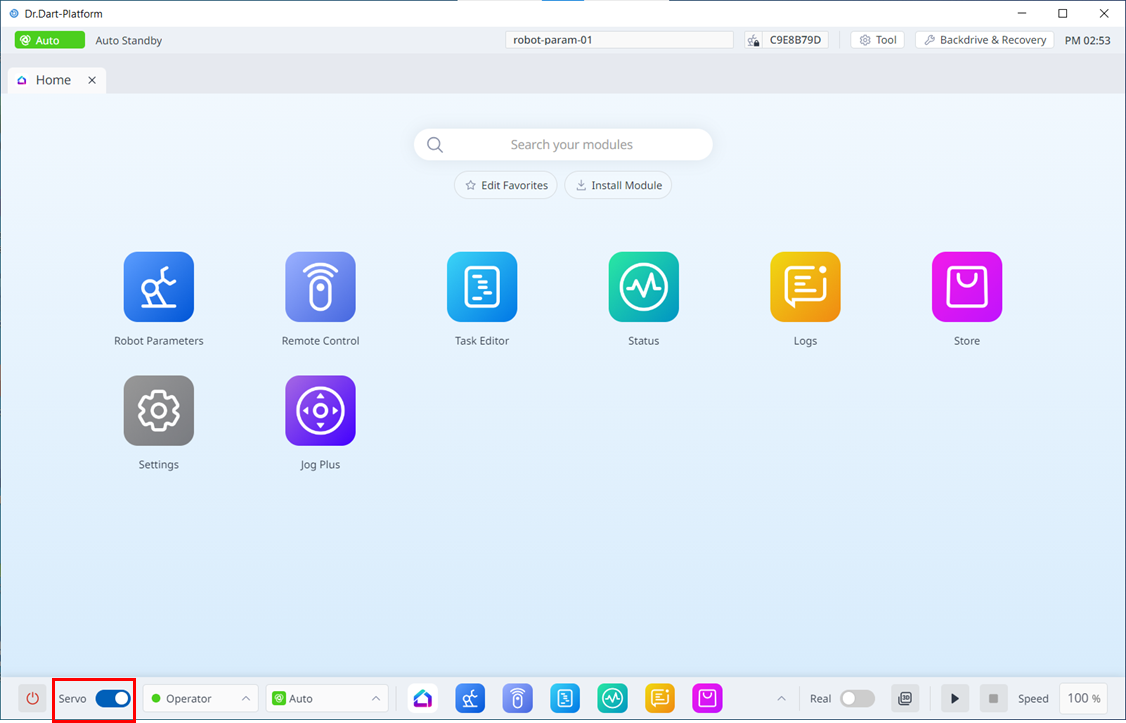
Aby przełączyć się z serwomechanizmu wyłączonego na serwomechanizm włączony, dotknij przycisku Servo po lewej stronie menu głównego w dolnej części.