
Nazwy i funkcje
Manipulator
Nazwy części
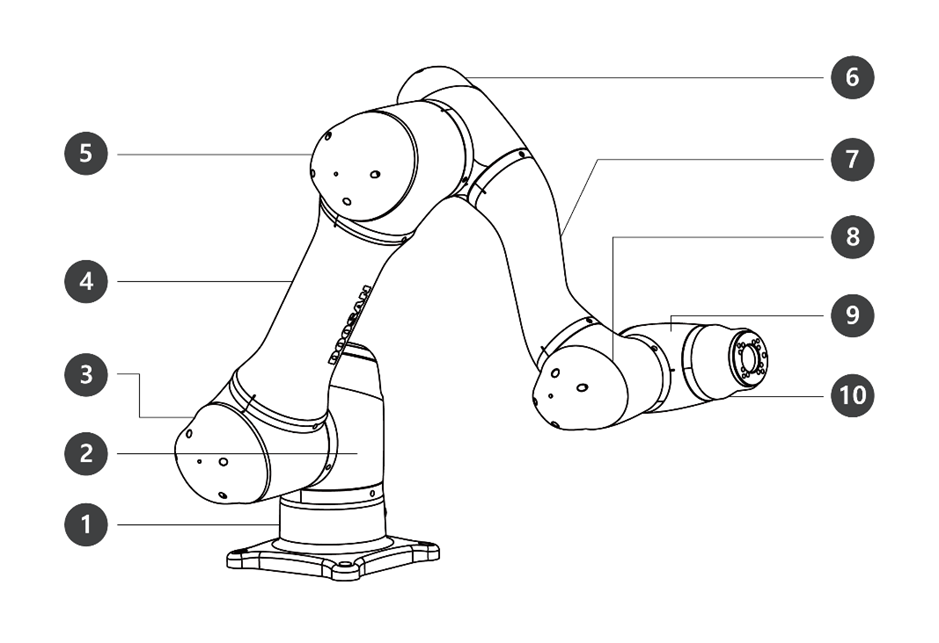
Nr | Nazwa | Nr | Nazwa |
|---|---|---|---|
1 | Podstawa | 6 | J4 |
2 | J1 | 7 | Cięgło 2 |
3 | J2 | 8 | J5 |
4 | Cięgło 1 | 9 | J6 |
5 | J3 | 10 | Kołnierz narzędzia |
Najważniejsze funkcje

Nr | Pozycja | Opis |
|---|---|---|
1 | Kokpit | [Opcjonalne] Przyciski obsługi do bezpośredniego nauczania i obsługi |
2 | Kołnierz narzędzia | Miejsce montażu narzędzi. |
3 | Dioda LED kołnierza | Wyświetla stan robota z różnymi kolorami. Więcej informacji na temat stanu robota można znaleźć w Stan i kolor kołnierza LED dla każdego trybu. Wersja: Seria H. Seria H jest wyposażona w dodatkową diodę LED na jednej osi, wskazującą ten sam stan i kolor. |
4 | WE/wy kołnierza | Port we/wy do sterowania narzędziami. |
5 | Złącze | Służy do zasilania i komunikacji robota. |
Sterownik

Nr | Pozycja | Opis |
|---|---|---|
1 | Złącze we/wy (wewnętrzne) | Może być połączony ze sterownikami innych robotów lub urządzeniami peryferyjnymi. |
| 2 | Terminal połączenia sieciowego | Służy do łączenia się z terminalem połączenia sieciowego wewnątrz kontrolera w celu korzystania z laptopów, urządzeń TCP/IP i urządzeń Modbus. |
| 3 | Złącze/przełącznik zasilania | Służy do podłączania zasilania sieciowego kontrolera w celu jego włączenia lub wyłączenia. Aby uzyskać więcej informacji, patrz Włączanie/wyłączanie systemu. |
| 4 | Złącze USB | Służy do przechowywania dzienników utworzonych podczas pracy robota w pamięci USB lub eksportowania i importowania zadań. |
| 5 | Złącze kabla manipulatora | Służy do podłączania kabla manipulatora do kontrolera. |
| 6 | Terminal do podłączenia kabla manipulatora | Służy do podłączania kabla manipulatora nauczania do sterownika. |
Uwaga
- W przypadku wybrania opcjonalnego kontrolera przed użyciem należy zapoznać się z instrukcją obsługi w dodatku, aby nawiązać połączenie.
Sterowanie manipulatorem
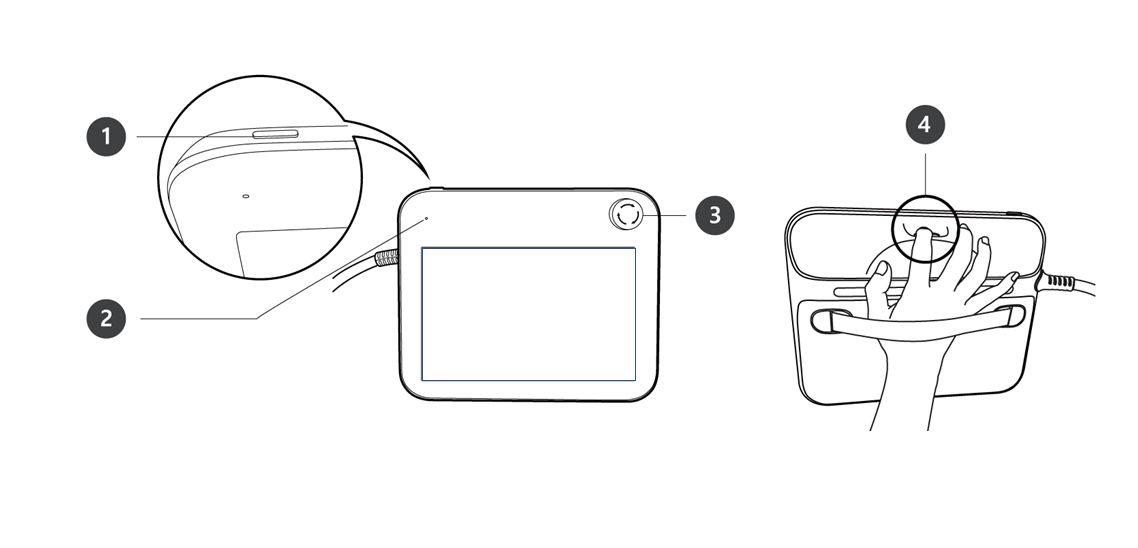
Nr | Pozycja | Opis |
|---|---|---|
1 | Przycisk zasilania | Służy do WŁĄCZANIA/wyłączania głównego zasilania manipulatora nauczania. Aby uzyskać więcej informacji, patrz Włączanie/wyłączanie systemu. |
2 | Dioda LED zasilania | WŁĄCZA SIĘ po podłączeniu zasilania. |
3 | Przycisk zatrzymania awaryjnego | W przypadku sytuacji awaryjnej naciśnij przycisk, aby zatrzymać pracę robota. |
4 | Przycisk prowadzenia ręcznego | Naciśnij i przytrzymaj przycisk, aby swobodnie przesunąć robota do żądanej pozycji. |
Uwaga
- Jeśli manipulator Teach wymaga zabezpieczenia i zamontowania podczas pracy, miękka osłona dostarczona przez nas sprawia, że jest bezpieczniejszy i łatwiejszy w użyciu.