
Ustawienia limitu przestrzeni
Aby ustawić limity przestrzeni dla robota, dotknij przycisku 
- Należy podać nazwę stanowiska roboczego w polu Workcell Name znajdującym się na górze ekranu Workcell Setting.
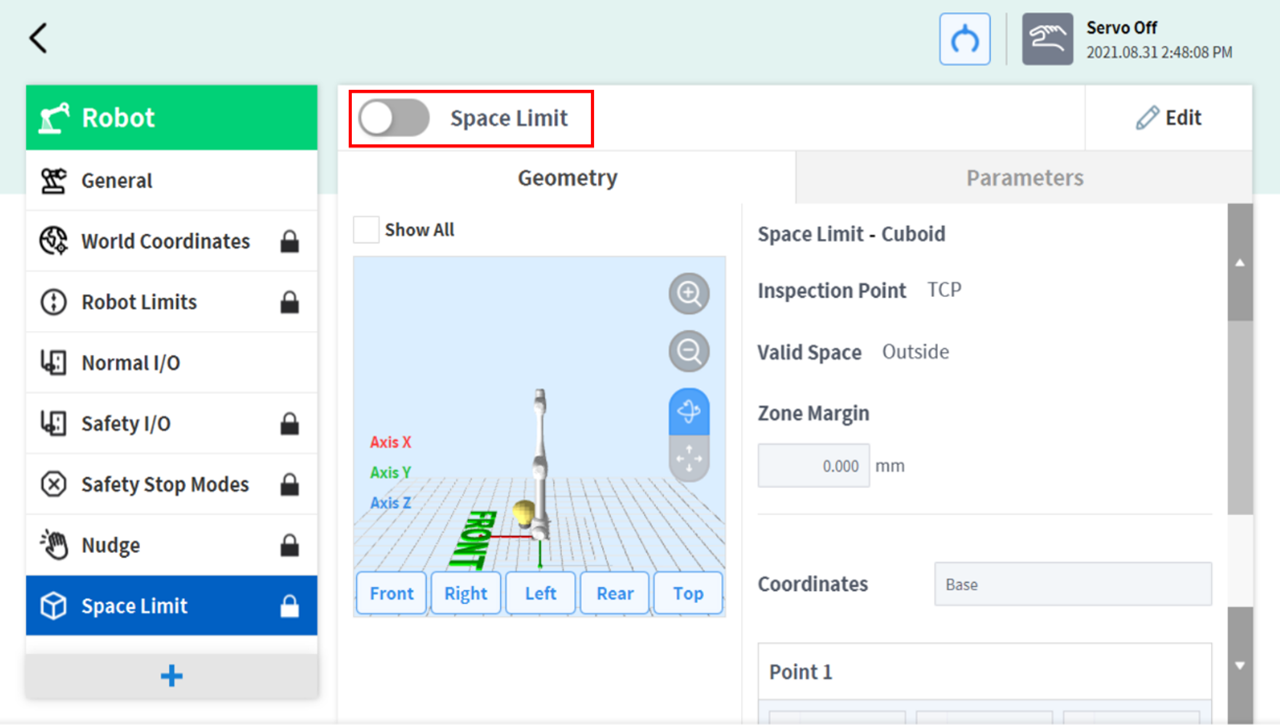
- Informacje o pozycji należy ustawić zgodnie z kształtem Space Limit oraz Inspection Point, Valid Space i Zone Margin na karcie Geometry.
- Ustaw Dynamic Zone Enable i Advanced Options na karcie Parameters, a następnie naciśnij Draft.
- Sprawdź, czy wszystkie wyświetlane parametry są takie same jak te, które powinny być ustawione, a następnie zaznacz opcję Confirm draft i naciśnij przycisk Confirm..
- Nacisnąć przycisk Activate Toggle, aby zastosować limit przestrzeni.
Uwaga
W zależności od metod ustawiania w systemie istnieją domyślne marginesy strefy.
- Jeśli ustawiono kształt narzędzia i nie zaznaczono opcji Body volume check (Sprawdzanie objętości korpusu), to margines TCP wynosi 0 mm.
- Jeśli ustawiono kształt narzędzia i zaznaczono opcję Body volume check (Sprawdzanie objętości korpusu), to margines TCP wynosi 0 mm.
- Jeśli nie ustawiono kształtu narzędzia i nie zaznaczono opcji Body volume check (Sprawdzanie objętości korpusu), to margines TCP wynosi 0 mm.
- Jeśli nie ustawiono kształtu narzędzia i zaznaczono opcję Body volume check (Sprawdzanie objętości korpusu), to margines TCP wynosi 60 mm..