
Ustawienia limitów robota
Służy do ustawiania limitów bezpieczeństwa funkcji monitorowania bezpieczeństwa.
Uwaga
- Limit i początkowe ustawienia bezpieczeństwa mogą się różnić w zależności od konstrukcji robota.
- Limity bezpieczeństwa to warunki, w których funkcja monitorowania o określonej klasie bezpieczeństwa wyzwala funkcję zatrzymania. Po zakończeniu zatrzymania pozycja robota i siła oddziałująca z zewnątrz może różnić się od skonfigurowanego progu bezpieczeństwa.
Ÿ Limity TCP/robota
Aby ustawić limity TCP/robota, należy przejść do stanowiska roboczego Robot i wybrać Robot > Robot Limits > TCP/Robot. Rozmieszczenie elementów na ekranie limitów TCP/robota:
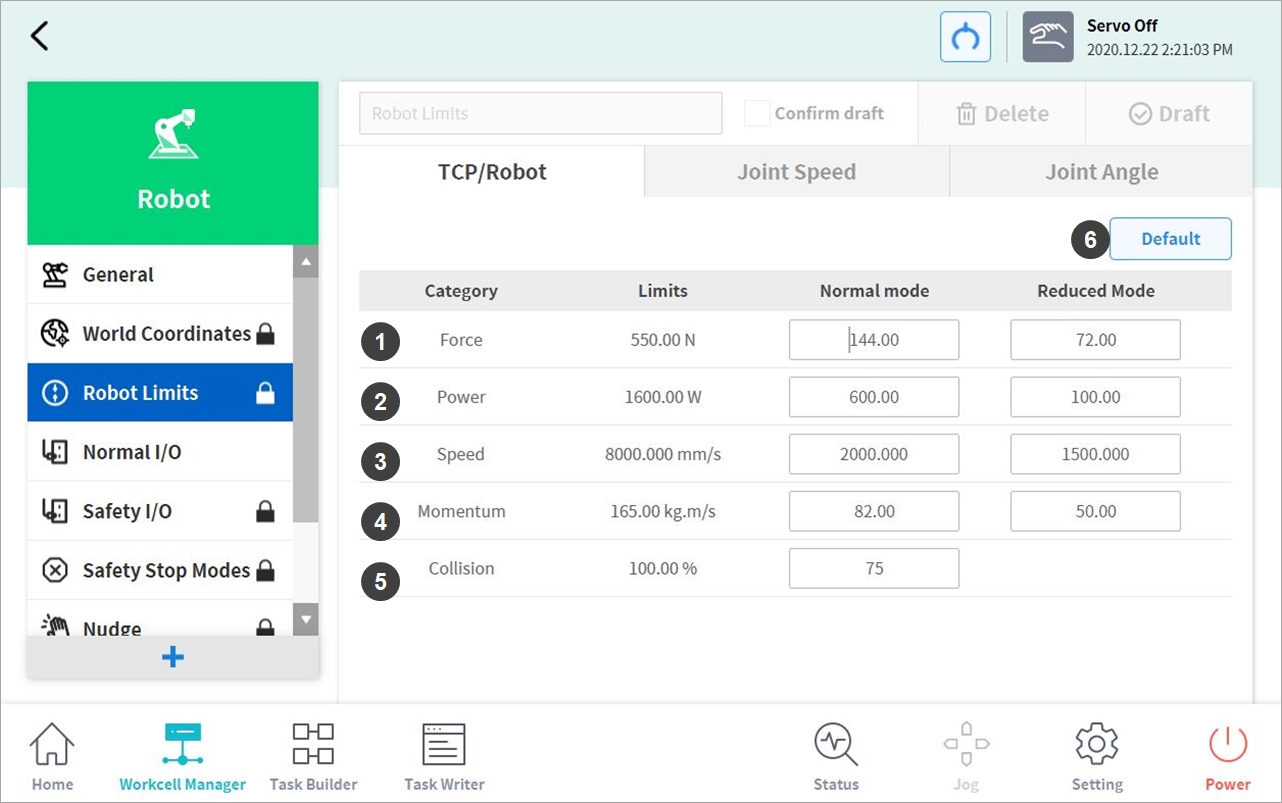
Lp | Element | Opis |
1 | Force (N) | Służy do ograniczania poziomu siły działającej na punkt środkowy narzędzia (TCP). |
2 | Power (W) | Służy do ograniczania poziomu mocy mechanicznej robota. |
3 | Speed (mm/s) | Służy do ograniczania prędkości w punkcie środkowym narzędzia (TCP). |
4 | Momentum (kg.m/s) | Służy do ograniczania pędu robota. |
5 | Collision (%) | Służy do konfiguracji czułości wykrywania kolizji. |
6 | Default Value | Przywraca limity TCP/robota do ustawień domyślnych. |
Ÿ Limity prędkości przegubu
Aby ustawić limity prędkości przegubu, należy przejść do stanowiska roboczego Robot i wybrać Robot > Robot Limits > Joint Speed. Rozmieszczenie elementów na ekranie limitów prędkości przegubu:
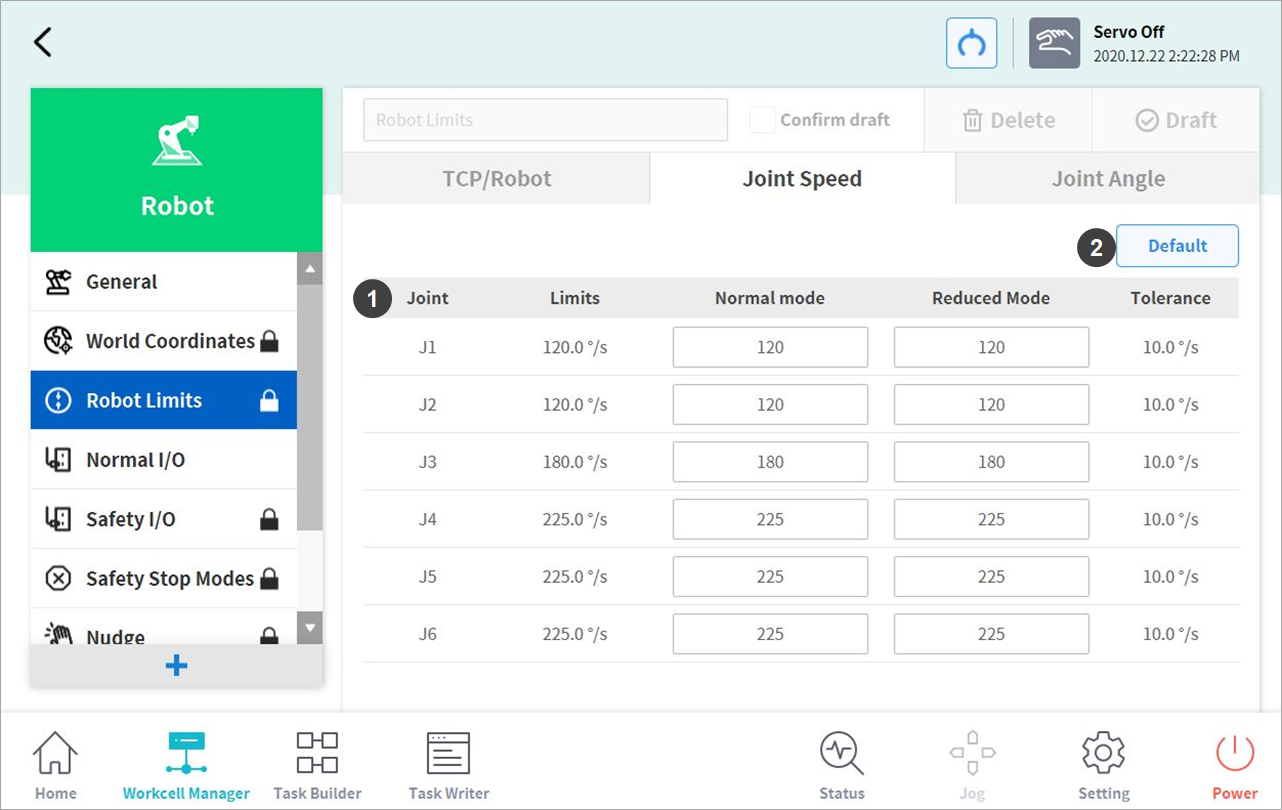
Lp | Element | Opis |
1 | Joint Speed | Umożliwia ograniczanie prędkości każdego przegubu. |
2 | Default Value | Przywraca ustawienia limitów prędkości przegubu do ustawień domyślnych. |
Ÿ Limity kąta przegubu
Aby ustawić limity kąta przegubu, należy przejść do elementu stanowiska roboczego Robot i wybrać Robot > Robot Limits > Joint Angle. Rozmieszczenie elementów na ekranie limitów kąta przegubu:
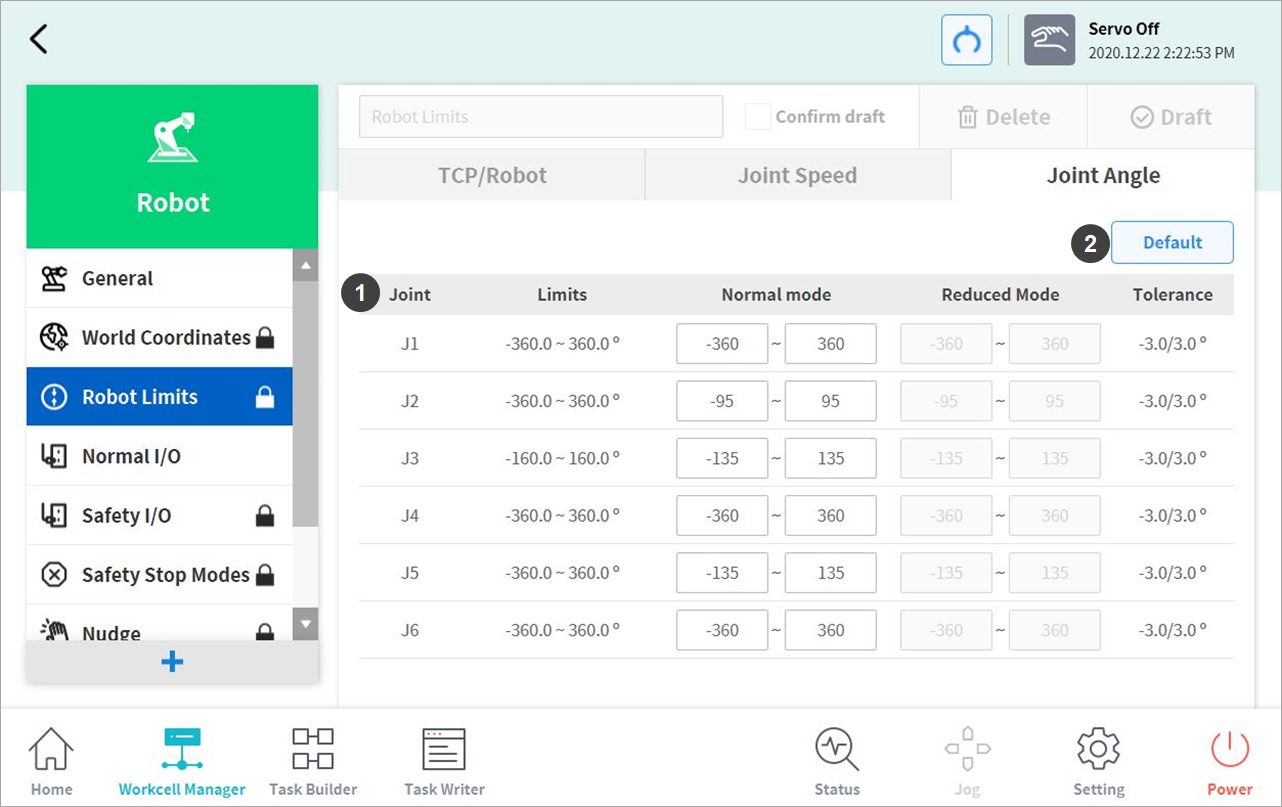
Lp | Element | Opis |
1 | Angle Range of each Joint | Umożliwia ograniczanie zakresu kąta dla każdego przegubu. |
2 | Default Value | Resetuje ustawienia limitów kąta przegubu do ustawień domyślnych. |