
Wykonywanie na bazie przegubu
Aby ustawić kąt na podstawie przegubu robota, należy:
- Wybrać kartę Joint na ekranie Joint.
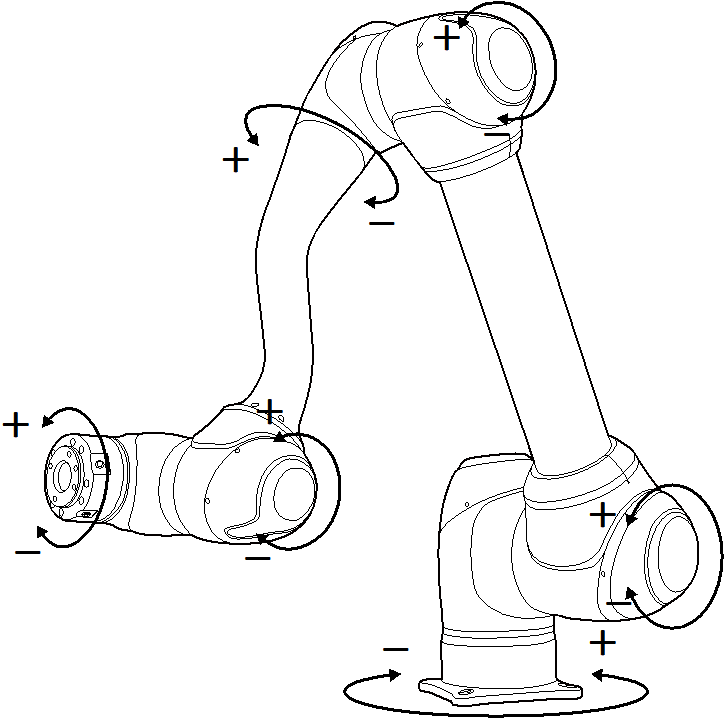
- Wybrać oś od J1 do J6, aby ustawić kąt.
- Nacisnąć i przytrzymać przycisk kierunku(


Uwaga
Obszar bezpieczeństwa nie ma zastosowania w trybie wirtualnym.