
Ustawienie robota - ustawianie współrzędnych świata
OPCJONALNIE NORMALNY 3 MIN
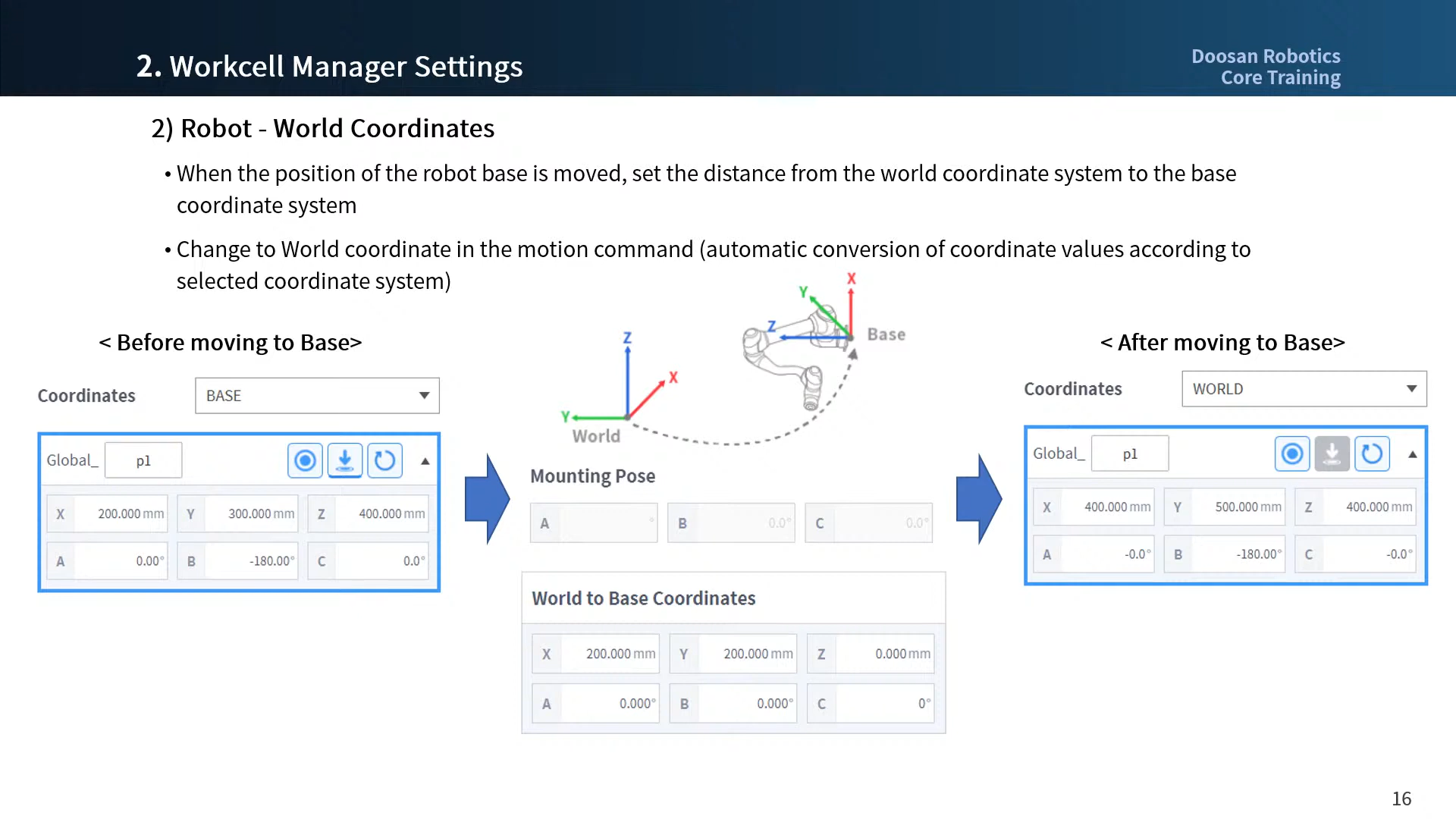
Współrzędne świata robota można ustawić na podstawie współrzędnych świata. Jeśli współrzędna robota jest współrzędną bazową, krok ten można pominąć.
Współrzędne świata można ustawić za pomocą Workcell Manager > Robot > współrzędne świata. Więcej informacji można znaleźć w części Ustaw współrzędne świata.
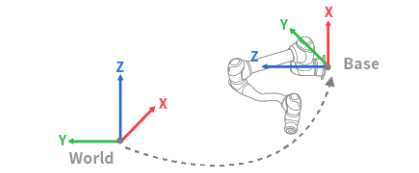
- Współrzędne świata są używane, gdy lokalizacja instalacji bazy robota jest fizycznie przesuwana/obracana.
- Zmiana współrzędnych świata spowoduje zastosowanie tego samego ruchu/obrotu na ekranie symulatora robota.
Uwaga
Współrzędne świata mogą być również używane nawet po zmianie lokalizacji i kąta bazowego po nauczeniu robot. Jeśli współrzędne zadań utworzonych w przeszłości za pomocą nauki robota zostaną zmienione z BAZY na ŚWIAT, do wszystkich współrzędnych ruchu zostanie zastosowane przesunięcie odpowiadające ruchowi/rotacji współrzędnych świata.