
Ustawienia punktu orientacyjnego
Aby skonfigurować punkt orientacyjny dla polecenia, należy:
- Wybrać typ (Absolute, Relative) współrzędnej odniesienia i wartość współrzędnej.
- Za pomocą funkcji impulsowania lub przez bezpośrednie uczenie wykonać ruch robotem w celu ustawienia go w żądanej pozycji.
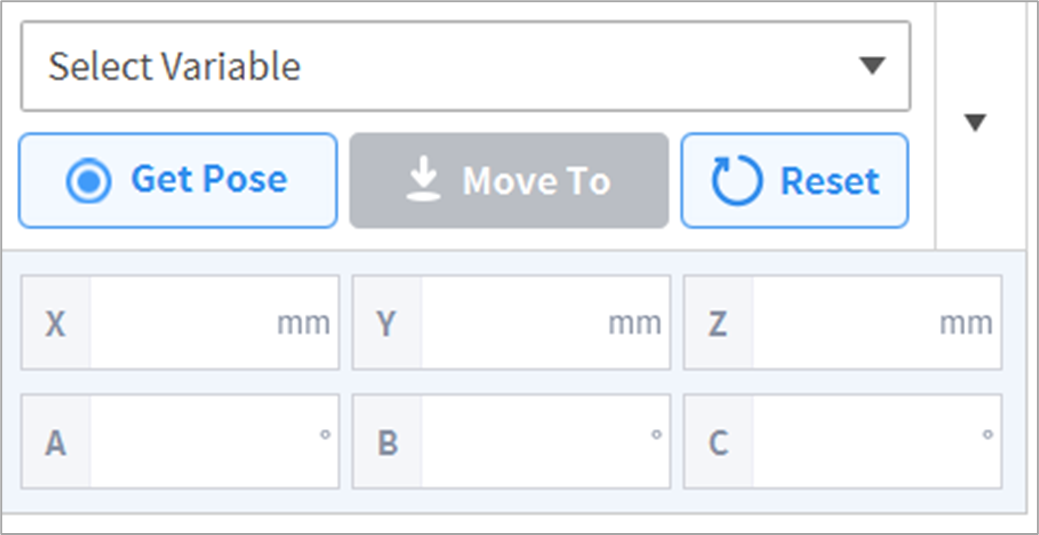
- Nacisnąć przycisk Save Pose, aby zapisać pozycję narzędzia robota.
- W razie potrzeby zdefiniować zmienną za pomocą GlobalVariables lub polecenia Define.
- W razie potrzeby zdefiniować zmienną za pomocą GlobalVariables lub polecenia Define.